







目次
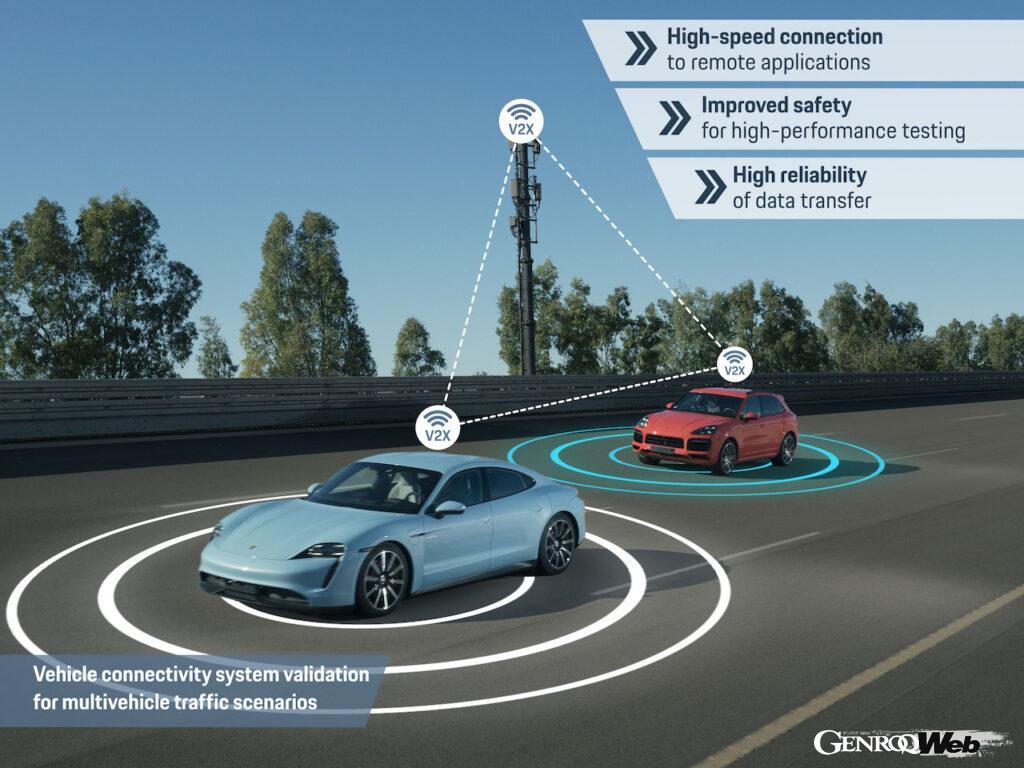
自動車と自動車の相互通信

現在、ポルシェ・エンジニアリングは、量産に耐えうる「V2X」機能を開発し、AIを活用した新機能のテストにもすでに取り組んでいる。例えばカーブの先で、大きな枝が道をふさいでいた場合、車両がコーナーに進入すると、フロントカメラが障害物を検知。すぐにシステムが作動し、危険を評価するアルゴリズムに応じて警告し、枝を危険物と判断すると自動でブレーキがかけられる。
そしてそのブレーキングと同時に、障害物の位置と種類をモバイルネットワークを使ってクラウドサーバーへと報告。同じように危険な場所に近づいていた他のドライバーに対して、ダッシュボードに「障害物(Obstacle)」の警告メッセージが表示される。さらに、最新システムでは車道上の枝までの距離までも表示され、ドライバーは事前に危険な状況に備えることができるという訳だ。
「V2X」技術の急速な進展により、このシナリオはまもなく現実のものとなるだろう。数年後には、車両同士が常に連絡を取り合い、周囲の環境を把握。さらに、歩行者のスマートフォンや信号機とも、情報を交換することができるようになる。「V2X」は事故を防ぎ、交通の流れを改善、先進運転支援システム(ADAS)をより効果的にするために役立つと考えられている。
ポルシェ・エンジニアリングのV2X技術担当プロジェクトリーダーのパスカル・ボーヘンスドルフは、V2X技術について「未来の自動車は、自身のセンサー技術だけでなく、他の道路利用者のセンサーシステムも活用することになります。 これにより、V2Xは完全自律走行に向けて重要な一歩を踏み出すことになるのです」と説明する。
中国で行われている「V2X」技術の導入

現在「V2X」技術をリードするのが中国だ。中国東部の都市・無錫(むしゃく)では、多くの信号機が交通管制センターに接続。次の青信号がいつのタイミングなのか、事前にドライバーへと通知している。さらに、無錫市の首都圏では道路利用者のネットワーク化も試みられているという。
例えば、通行する車両の車載センサーにより路面が滑りやすいと判断した場合、その情報を中央のサーバーに送信し、他の車両に伝えることも実現している。ポルシェ・エンジニアリングは、上海近郊の安亭にある開発センターにおいて、すでに「V2X」技術の集中的な実環境テストを実施している。
「V2X」技術は、様々な新機能をドライバーへともたらすことになるだろう。信号機のライブ情報機能を、ディスタンス・クルーズコントロールに接続することで、信号待ちの時間が短くなるように速度を変更。効率的な運転ができるようになる。また、ハザードランプを点灯したまま停車した場合、近くの道路利用者に直接近距離通信で知らせることができる。この危険警告は中央サーバーへと転送され、遠方にいる道路利用者へと伝えることも可能だ。
Wi-Fi規格か5G通信規格か?

自動車同士を接続する技術は、原則としてふたつ存在する。ひとつは、無線Wi-Fi規格の一種である「IEEE 802.11p」。この技術は、車両同士が直接通信することが可能となる。ただ、200~300m以上離れている場合は、通信を中継するための路側機(RSU)が道路沿いに必要。ルーターの設置にはコストがかかるが、Wi-Fiは技術的に十分に発達しており、比較的導入しやすいといえるかもしれない。
もうひとつは、既存の携帯電話網を利用する方法。対応する規格は「C-V2X」(「C」は「cellular(携帯電話)」の略)。当初は4G/LTE規格をベースにしており、すべてのデータは基地局を使って送信する必要があった。現在の5G規格では、車両間の直接通信も可能になっている。
欧米では当初「IEEE 802.11p」を採用していたが、2年前に米国の規制当局であるFCC(米国連邦通信委員会)がこの規格に必要な無線周波数を撤廃してしまった。さらに中国は5Gベースのネットワーキングを推進しており、 2025年までに、中国における新車はすべて常時オンライン化される予定となっている。
「これらの事情から、このため、V2Xでは携帯電話通信を利用したシステムが主流になると想定しています」と指摘するのは、 ポルシェ・エンジニアリングのコネクティビティ担当シニアマネージャーのトーマス・プレッチだ。
「PEVATeC」による危険物のシミュレーション

「V2X」機能の実装は、ソフトウェア開発からスタートする。冒頭で紹介した障害物警告の場合、人工知能(AI)の活用が必須だ。
実際の走行状況を記録したニューラルネットワークをAIに学習させた上で、障害物を認識・分類できるようにし、実際の危険物(歩行者や枝など)と、無害な物体(葉やビニール袋など)を100%確実に区別できるようにしなければならない。特に危険な状況については、現実の訓練材料が少ないことが多いため、合成データで補うことになる。
「実際の走行状況に、仮想空間上で変化を加えることになります」と、ポルシェ・エンジニアリングのAI・ビッグデータ担当シニアマネージャーのヨアヒム・シャパーは説明する。
そのために使用されるのが「PEVATeC(Porsche Engineering Virtual ADAS Testing Center)」と呼ばれる、ポルシェが開発した専用ツール。「PEVATeC」は、道路や車両など目に見える環境だけでなく、対応する状況で車両バスに搭載されるセンサーデータも含めて、物理的な環境を正確に仮想空間で再現する。
「PEVATeC」によって、「道路上にある枝」などの危険な状況を、いくらでも再現することが可能になった。太陽がまぶしい時、暗い時、大雨が降っている時……など、あらゆる条件下を想定しなければならない。AIはどのような状況であっても、対象物を正しく分類しなければならないからである。
5G環境下にあるナルドでのテスト

AIのトレーニング後、エンジニアはニューラルネットワークを「カー・データ・ボックス(CDB)」と呼ばれるコンポーネントへとコピーする。ルーマニアのクルージュ・ナポカとティミシュオアラにある、ポルシェ・エンジニアリングの開発拠点において研究・開発されたこの専用コンピュータは、テスト車両に搭載され、あらゆる先進運転支援システム(ADAS)プログラムを実行することができる。
カー・データ・ボックスはニューラルネットワークを使用して、障害物警告のために実際のカメラとセンサーのデータを評価することも可能だ。特殊なアルゴリズムを使い、物体が危険のレベルを超えたかを判断し、段階的なシステムに従って対策を開始。ダッシュボード上に表示される警告メッセージから、音響警告、そして最終的には自動ブレーキが作動する。
最終段階では、実際の条件下において、「V2X」機能のテストが実施された。イタリアの「ナルド・テクニカルセンター(NTC)」は、700ヘクタールの敷地全体にプライベート5Gネットワークを備えているため、「V2X」機能のテストに理想的な条件を備えている。エンジニアは発せられた警告メッセージが、現実の状況で車両が確実に受信するかを確認した。
十分な帯域とスピードを実証した5Gネットワーク

2022年の夏、ポルシェのエンジニアは、高速走行時にデータがどれくらいのスピードで伝わるかを、ナルドでテストしている。数台の車両が、カー・データ・ボックスがデータを送信している間、全長12.6kmの高速サーキットを1周。その結果、100km/hまではダウンロードで1Gbps、アップロードで150Mbpsと、ほぼ一定のデータ転送速度が保たれていた。
200km/hを超えると、アップロード速度は120Mbpsとわずかに低下するが、受信速度に変化はない。それ以上の速度になると帯域(通信などに用いられる最も低い周波数と最も高い周波数の範囲)は減少するものの、データアップロードでは90Mbpsと十分な帯域が確保されていた。
このテストにおいて、5Gネットワークの帯域幅とスピードが、自動車用アプリケーションの使用に十分耐えうると実証された。また、ハンドオーバー(基地局から次の基地局への移行)も集中的にテストされた。以前の無線Wi-Fi規格では接続が切れることもあったが、5Gでは高速域においても確実にハンドオーバーに成功している。
現在、「V2X」機能の開発において、ポルシェ・エンジニアリングのスペシャリストたちは、いちいちナルドへのテストコースへと出向く必要はなくなった。カー・データ・ボックスの現行バージョンには5Gモジュールが搭載されており、リモートでテストプログラムをインストールすることが可能になったからだ。
現在では、テストドライブ後、あるいはテストドライブ中に、カー・データ・ボックスは5Gを使ってすべてのデータをクラウドへと送り返し、そこで分析・強化している。運転と評価・実装は、時間や場所に関係なく実施されており、精度は日々高められている。「V2X」機能を含めたコネクテッドドライブ機能は、我々が想定しているよりも早く実用化されるかもしれない。