マツダが2016年に発表した「SKYACITV-VEHICLEDYNAMICS」の第一弾が「G-VectoringControl」(GVC)だ。シャシーとパワートレーンのチームが一体となって開発した車両統合制御技術である。
G-VectoringControlは、エンジンでシャシー性能を向上させる新しい試みである。
ドライバーはアクセルで前後Gを、ステアリングで横方向のGを制御するが、GVCはエンジンとステアリングを完全に連携して制御することで4輪の接地荷重を瞬間に最適化、前後方向と横方向のGがより滑らかにつながるようにし、旋回応答性と安定性を両立させる。具体的には、ドライバーのステアリング操作に応じてエンジンの駆動トルクを瞬間的に緻密に制御する。制御周期は5ミリ秒。つまり1000分の5秒毎にトルク量を微妙に上下させることで4輪の接地荷重を最適化し、スムーズな車両の挙動を実現するわけだ。
 GVCはタイヤのポテンシャルを最大化するためにタイヤにかかる接地荷重に着目した。ハンドルの切り始めはエンジンの駆動トルクを制御して減速Gを発生させ前輪への荷重移動を行なう。ドライバーがハンドルを保持したときは瞬時に駆動トルクを復元して後輪への荷重移動を行なう。
GVCはタイヤのポテンシャルを最大化するためにタイヤにかかる接地荷重に着目した。ハンドルの切り始めはエンジンの駆動トルクを制御して減速Gを発生させ前輪への荷重移動を行なう。ドライバーがハンドルを保持したときは瞬時に駆動トルクを復元して後輪への荷重移動を行なう。
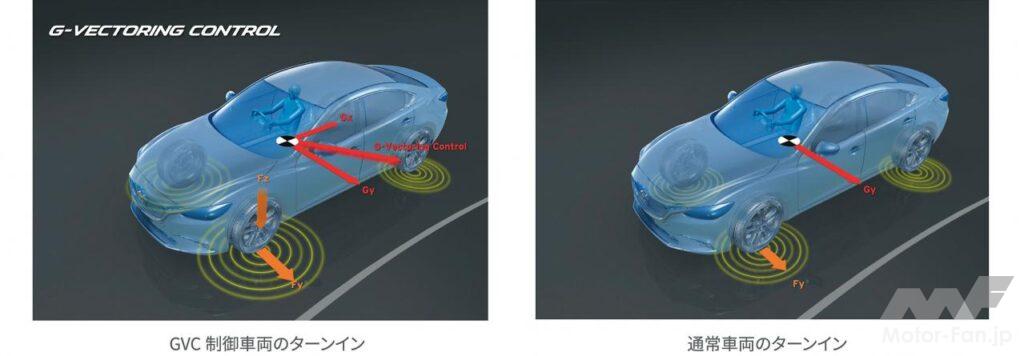 GVCは、これまで別々に制御されてきた前後方向と横方向の加速度(G)を統合制御する。コーナリング時に通常はGが真横にかかるところがGVCだと斜めにかかるイメージ。試乗した印象もその通りだった。
GVCは、これまで別々に制御されてきた前後方向と横方向の加速度(G)を統合制御する。コーナリング時に通常はGが真横にかかるところがGVCだと斜めにかかるイメージ。試乗した印象もその通りだった。
実際に変化する加速度は最大で0.05G、通常で0.01Gとエンジンブレーキより断然小さい微少なG変化である。エンジン出力で数Nm、荷重で1輪あたり数kgというごく微少な領域だ。この程度で効果があるのか?という疑問は試乗で氷解した。緊急回避のシングルレーンチェンジでは明確に効果が体感できた。それ以上に印象的だったのは、意識せずに運転操作をしている20km/hという低速時やごく普通の直線を走っているときの修正舵、舵角の少なさだ(これはデータで確認して驚いた)。
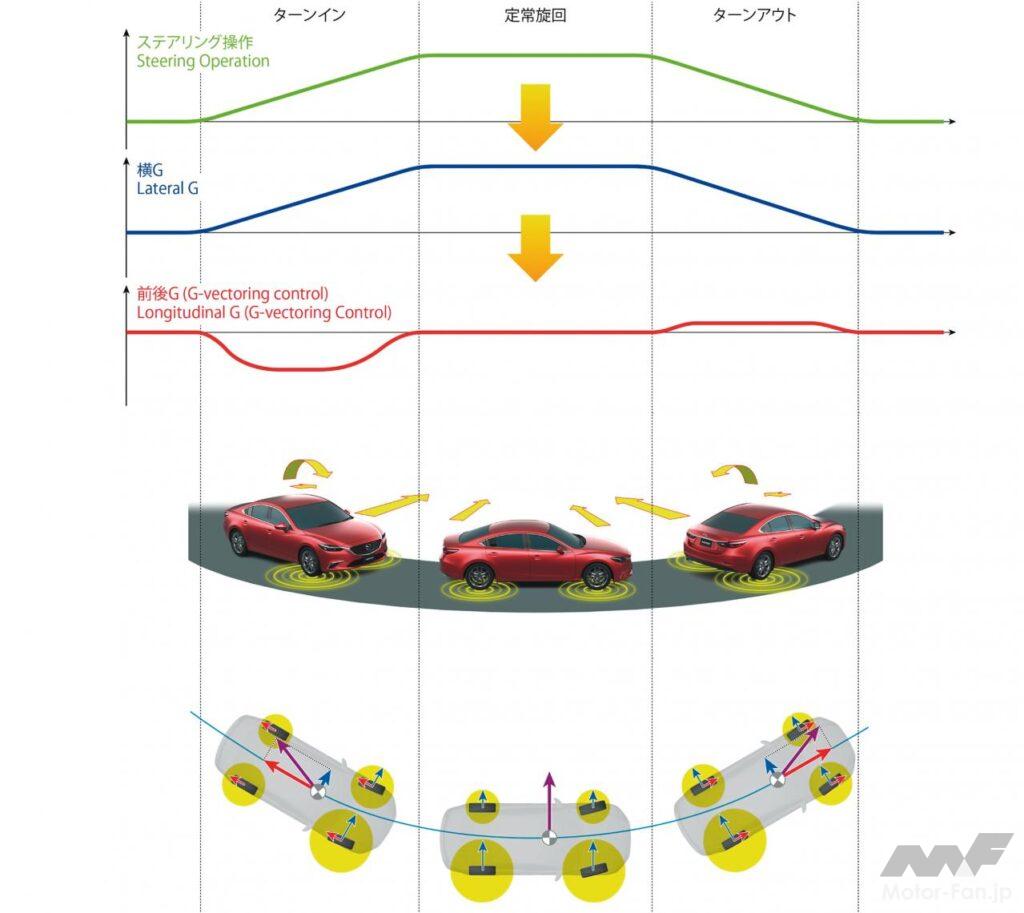 GVCではターンインの際に-側のGを、ターンアウト時には+側のGを発生させる。発生させるGは最大で0.05G、通常で0.01Gと微少。エンジンが100Nmで運転しているときに5Nm減らす程度のイメージ。その際1輪あたりわずか2-3kgの荷重変化となるという。
GVCではターンインの際に-側のGを、ターンアウト時には+側のGを発生させる。発生させるGは最大で0.05G、通常で0.01Gと微少。エンジンが100Nmで運転しているときに5Nm減らす程度のイメージ。その際1輪あたりわずか2-3kgの荷重変化となるという。
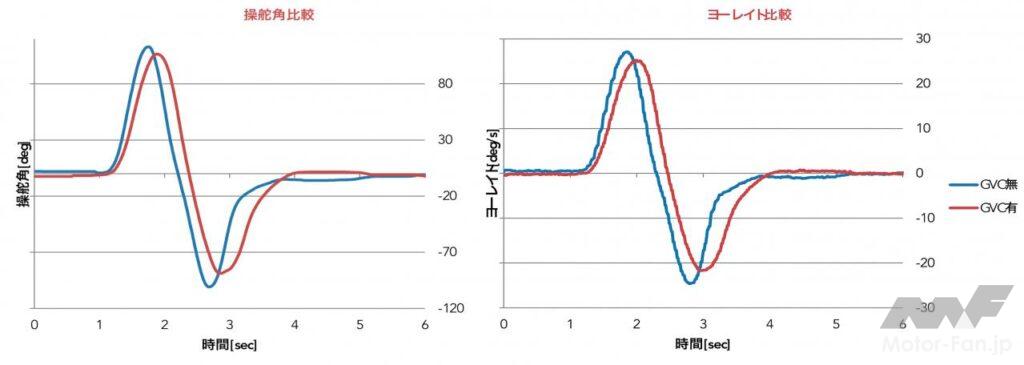 レーンチェンジの際のGVC有/無での操舵角とヨーレートの比較。操舵角を見ると、GVCをONにすると切り戻した際の修正舵がなく、ピタリと車両の挙動が収まっているのがわかるし、ドライバーも体感できる。
レーンチェンジの際のGVC有/無での操舵角とヨーレートの比較。操舵角を見ると、GVCをONにすると切り戻した際の修正舵がなく、ピタリと車両の挙動が収まっているのがわかるし、ドライバーも体感できる。
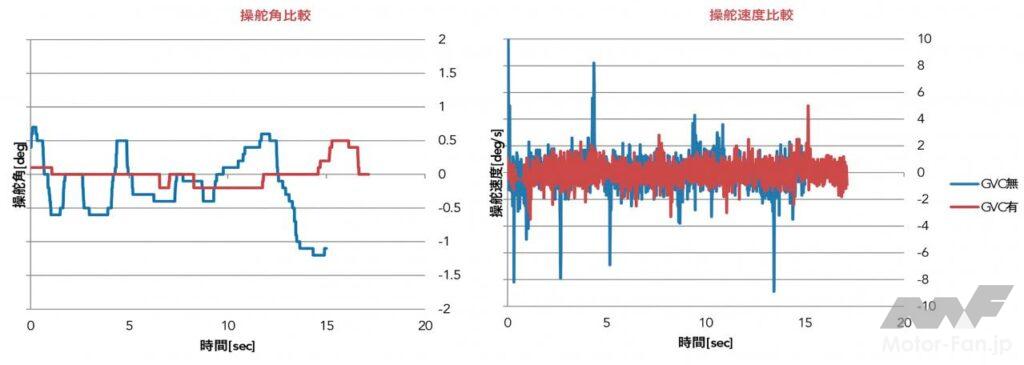 高速周回路での操舵角の比較を見ると、GVC有りだと操舵角そのものも減少し、操舵速度も安定しているのがわかる。ドライバーは直線路でも無意識に微少なステアリング修正をしているが、それも大きく減っている。
高速周回路での操舵角の比較を見ると、GVC有りだと操舵角そのものも減少し、操舵速度も安定しているのがわかる。ドライバーは直線路でも無意識に微少なステアリング修正をしているが、それも大きく減っている。
もともと「スキルフルなドライバーの運転を克明に分析することから始まった」GVCの開発だが、いかに優れたドライバーでも5ミリ秒毎に数Nm単位のアクセルコントロールはできない。5ミリ秒の制御周期に対応できる高応答のSKYACTIVエンジンあってのGVCだが、ECUの制御プログラムだけでこれだけ車両の運動に効果があることに驚いた。
 試乗車はGVCのON/OFFスイッチで制御のあり/なしを体験できた。砂利道など路面状況が悪いほど効果が感じられる。といっても、ドライバーが「あ、いま制御が入った」とわかるようなものではなく、あくまでも自然だ。
試乗車はGVCのON/OFFスイッチで制御のあり/なしを体験できた。砂利道など路面状況が悪いほど効果が感じられる。といっても、ドライバーが「あ、いま制御が入った」とわかるようなものではなく、あくまでも自然だ。
キーワードで検索する


![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の1枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_main76094_20210225091008000000-150x150.jpg)
![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の2枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_4610870_202102250909250000001-150x150.jpg)
![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の3枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_4610871_202102250909250000001-150x150.jpg)
![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の4枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_4610873_202102250909260000001-150x150.jpg)
![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の5枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_4610874_202102250909260000001-150x150.jpg)
![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の6枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_4610875_202102250909270000001-150x150.jpg)
![「マツダが提唱するG-VECTORING CONTROLとは?[内燃機関超基礎講座]」の7枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_4610877_202102250909270000001-150x150.jpg)