

目次
自動車業界ではCASE(Connected、Autonomous、Shared & Services、Electric)の技術革新が加速している。Autonomous(自動運転)の領域では、特定条件下において車線を維持しながら前方車両に自動追従して走行できる自動運転レベル2の自動車の普及が進んでいる。昨今では、高速道路走行時や低速走行時などの条件下に限りシステムが全ての運転タスクを実行する自動運転レベル3の自動車が開発され、一部販売開始されているす。一方で、自動運転レベル3の自動車の普及や自動運転機能のさらなる高度化のためには、より使い勝手が良くかつ、より高精度な車両位置測位が求められている。
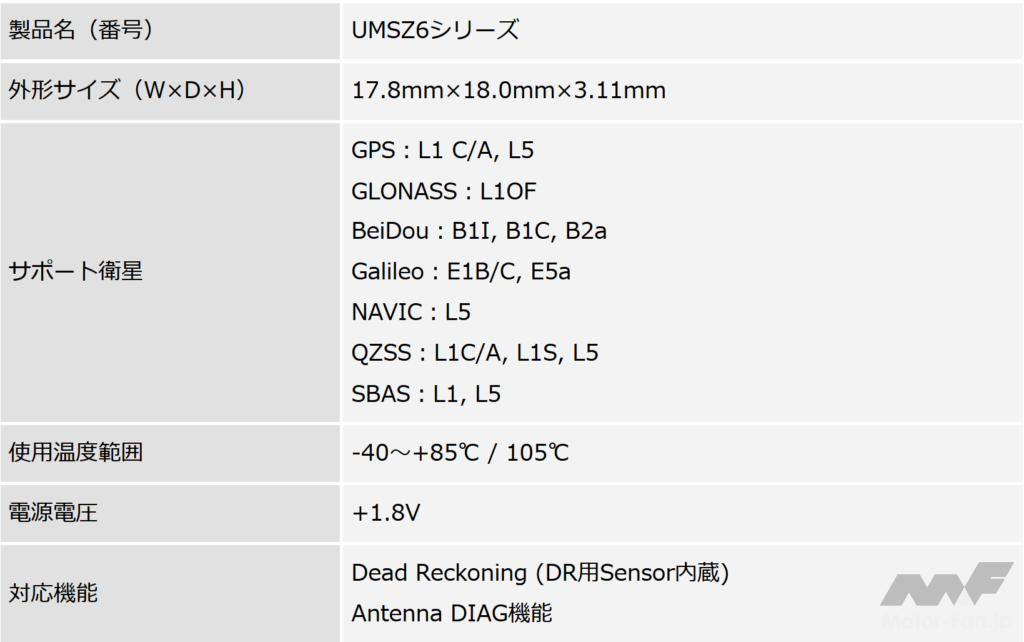
この度、アルプスアルパインと古野電気が共同で開発したGNSSモジュール「UMSZ6シリーズ」は、古野電気のExtended Carrier Aiding※3技術による多周波GNSSチップを活用することで、車両位置の補正情報を不要としながらも車載向けで世界初の車両位置誤差50cmの高精度測位を実現した。RTK※4基準局や補正情報の受信部、さらには補正情報の使用に伴うランニングコストも不要となるため、コストパフォーマンスを最大化しつつ、一般道(幅員約3m)においても確実な車線レベルの車両位置測位を可能とする。アルプスアルパインが長年、車載市場で培ってきたモジュール化技術によって、車載品質に適合しながら製品サイズ17.8mm×18.0mm×3.11mmの小型化も実現。顧客側での設計自由度の向上にも貢献する。
本共同開発では、古野電気が独自の多周波GNSSチップ「eRideOPUS 9(イーライドオーパス9)型式:ePV9000B」およびアルゴリズムを開発・提供。アルプスアルパインが同チップを他社に先駆け初めて活用し、GNSSモジュール「UMSZ6」として製品化および、実車環境での性能やV2Xをはじめとした他通信モジュールとの連携なども含めた評価を行い、車載市場へ拡販する。
本共同開発について、両社執行役員は下記のとおり述べている。
アルプスアルパインの執行役員デバイス事業担当・泉 英男氏
「ミリ波レーダー、LiDAR並びにカメラ技術によって相対的車両位置精度は日進月歩で進化しております。レーンレベルでの絶対位置精度の確保がV2Xそして真の自動運転レベル3には不可欠になっておりますが、これまではRTK技術が必要であったため、システムコストが課題となっていました。この課題を、補正情報なしで車両位置誤差50cmの高精度測位を実現する、古野電気のExtended Carrier Aiding技術を活用した多周波GNSSチップで解決できることは、V2X並びに高度な自動運転技術においてブレークスルーとなっていくものと考えています」
古野電気の執行役員システム機器事業部長・本川勝徳氏
「自動車業界ではAutonomous (自動運転)への進化が急速に進んでおり、測位技術の高精度化が求められています。車載市場における長年の実績、厳しい車載品質へ適合するモジュール化技術、C-V2Xシステムへの取り組みを展開されているアルプスアルパインと、弊社が実現する測位技術の高精度化が融合することで、自動運転技術の実用化とさらなる高度化に貢献できると考えています」
今後は本製品のグローバルでの拡販を見据え、実証実験などを通じて性能評価を行い製品の完成度を高め、2023年中の量産開始を目指す。さらに、GNSSに限らず5GやV2Xなど自動運転の高度化に対応した通信モジュールを開発・提供していくことで、自動車による安全かつ快適な移動への貢献を追究していく。
主な用途
・テレマティクス制御ユニット(TCU)
・V2Xオンボードユニット(OBU)
主な仕様
※1 Global Navigation Satellite System(全地球衛星測位システム)の略。米国のGPSのほか、GLONASS(露)、Galileo(欧)、及びBeiDou(中)がある。ここではRNSS(Regional Navigation Satellite System)であるQZSS(日)とNavIC(印)も含む。
※2 Vehicle-to-everythingの略。車と車、車と道路設置設備(インフラ)、車と人など、車と何かをつなぐコネクティッド技術の総称。
※3 ノイズの影響を極限まで抑制する技術。搬送波位相による支援を受け、デュアルバンド化により伝搬遅延の影響を除去することで、大幅なノイズ低減に成功した。
※4 Real Time Kinematicの略。搬送波位相を使った相対測位。基準局(既知の場所に設置されたGNSS受信機)からの補正情報をGNSS受信機に送り、観測に含まれる系統的誤差を除去することにより、基準局との相対的な位置を数cm~数mmの精度で求める測位技術のこと。