【これからどうなる自動運転! 】自動運転実現のための技術要素とは? 解決すべき問題もまだまだあります|第1回基礎講座 後編
【新連載 これからどうなる自動運転!】センサー、地図、街づくり、そして法律など、自動運転実現へ向け整備すべきことは色々ある!

(1)センサー
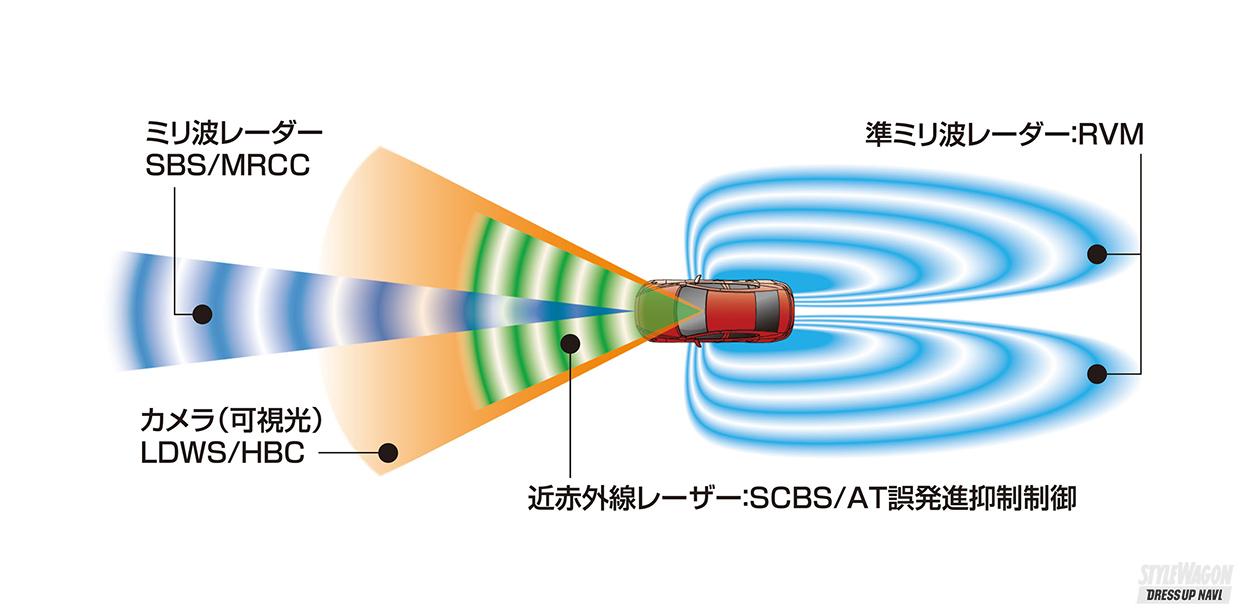
自動運転では、自分のクルマ(自車)の周辺の状況をさまざまなセンサーからデータを収集することが重要です。具体的にはカメラ、ミリ波レーダー、そして複数のレーザーを照射して画像化するライダーが用いられています。自動運転車を開発するメーカーによってどのセンサーを使い、他のセンサーとどのように組み合わせるのか。その考え方にかなりの差があります。それでも複数のセンサーを使うセンサーフュージョンを行うのが一般的です。
(2)地図
自車に装着したセンサーで集めたデータを基に、自車の周囲の地図との照らし合わせることで自動運転の精度を挙げるのが一般的です。地図というとカーナビで使う二次元地図を想像しますが、自動運転では高精度三次元地図と呼ばれる道路や建築物を三次元データによって構成する地図を使います。つまり、地図と呼んでいても、それが複雑なデータのカタマリというイメージです。日本では産学官連携で「ダイナミックマップ」が生まれました。
(3)街づくり
自動運転の実用化を進める上で、もっとも重要なことは「なぜ必要なのか」ということです。これを社会受容性と言います。社会受容性とは、地域住民の視点を第一に考える街づくり・地域づくりです。自動運転ではどうしても技術開発の考えが優先しがちで、それに法律を合わせるような流れがあり、これまでの自動運転の進め方での大きな反省点です。そこでデジタル庁では国の指針として社会からのバックキャストという考え方を示しています。
(4)AI
一言でAI(人工知能)といっても、理論や具体的な手法は様々あります。さらにAIの分野は新しい発想によって日々進化しています。そのため、自動車メーカーや自動車部品メーカーによってAIに対する捉え方に違いがあります。その上で、自動運転における様々な領域で精度を上げるためにはAIを駆使することが必然です。メーカー各社はAIに精通した人材を確保するために、都心に専用オフィスを設けるなどして人材確保を急いでいます。
(5)法律
自動運転ではこれまでの法律では対応できない事例が出てきます。そもそも自動車は人が運転することが前提だからです。そのため、自動車を走行するためのルールである道路交通法を見直す必要がありました。また技術的な観点では、これまでの自動車にはない機器が装着されますし、その整備方法についても考える必要があります。そこで道路運送車両法も改訂されました。今後も技術革新と並行して法律の改正がその都度行われるでしょう。
(6)コネクテッド技術
「つながるクルマ」という表現があります。例えばクルマ(車載器)とスマホがブルートゥースや有線でつながるアップル「Car Play」やグーグル「Android Auto」が日本でも徐々に普及しています。一方、自動運転ではクルマとクルマがつながる「車々間通信(V2V)」、道路側のシステムとクルマがつながる「路車間通信(V2I)」、そして歩行者とクルマがつながる「歩車間通信(V2P)」が必要です。これらまとめてV2Xと呼びます。
自動運転へ〜世界の始まり
自動運転という発想は第二次世界大戦前からあり、戦後は自動車産業が急拡大したアメリカでさまざまな実験が行われていました。しかし、技術的なハードルが高くフェードアウトしていきます。その後、2000年代前半から後半にかけ、アメリカ国防総省が所管する国家機関の主催による無人カーレースが合計3回開催されました。出場した大学の研究者や事業家などがグーグルなどにヘッドハンティングされ、自動運転実用化の礎を築いていきます。
 【これからどうなる自動運転! 】お台場近辺を走る「ゆりかもめ」は完全自動運転に! クルマの自動運転化は見えない未来の話じゃない!|第1回基礎講座 前編
【これからどうなる自動運転! 】お台場近辺を走る「ゆりかもめ」は完全自動運転に! クルマの自動運転化は見えない未来の話じゃない!|第1回基礎講座 前編「夢の技術」といったイメージが強い自動運転。果たして、その実態はどうなっているのでしょうか。ネットやテレビのニュースでは分からない自動運転の裏事情を知って頂き、あなたのカーライフの参考にしてください。
https://motor-fan.jp/stylewagon/article/72329/ 【これからどうなる自動運転!】国家戦略として、自動運転も対象に!? |第2回 自動運転へのロードマップ 前編
【これからどうなる自動運転!】国家戦略として、自動運転も対象に!? |第2回 自動運転へのロードマップ 前編2014年に立ち上がった自動運転の国家プロジェクトでさまざまな成果がありました。それが2023年3月で終了することが決まっていて、次世代の自動運転ロードマップは、これまでの実績をもとに意外な方向に進みそうなのです。
https://motor-fan.jp/stylewagon/article/78554/著者PROFILE 桃田健史
1962年8月、東京生まれ。日米を拠点に、世界自動車産業をメインに取材執筆活動を行う。インディカー、NASCARなどレーシングドライバーとしての経歴を活かし、レース番組の解説及び海外モーターショーなどのテレビ解説も務める。日本自動車ジャーナリスト協会会員。
▷これからどうなる自動運転 まとめはこちら
[スタイルワゴン・ドレスアップナビ編集部]
カーエレクトロニクスの関連記事

最新手口にバッチリ対応!『アルファード&ヴェルファイアを守る!カーセキュリティを熟知した凄腕ショップ Vol.1

「50代おじさん、ついに“見えない不安”を消す」いまどき必須なドラレコはルームミラー型!

『家族も安心して使えるセキュリティ!』性能と扱いやすさ両立した最適なプランを提案【クリップ】

「パーツをひとつずつ買うより、車両と合わせて買う」コンプリートな軽バンがお得でおすすめなワケ

この1台で全部網羅! セルスターからレーザー式オービス対応セーフティレーダーASSURA「AR-926AW」発売
