【国内初】空港制限区域内における自動運転レベル4を実用化。羽田空港での無人貨物搬送を運用開始
2025.12.18 11:00




全日本空輸(ANA)は、2025年12月より、豊田自動織機製の自動運転トーイングトラクター(※1) 3台を羽田空港の国内貨物搬送へ導入し、国内線定期便で運用を開始することを発表した。空港制限区域※2内における自動運転レベル4※3実用化は国内初となる。
この自動運転トーイングトラクターは、空港内全域における様々な環境・条件変化に対応できるように、自己位置推定や障害物検知システムを高性能化・冗長化している。また、高い安全性が求められるレベル4の自動走行において、異常時にも迅速に対応できるよう車両の周囲の状況を把握する遠隔監視機能を搭載している。12月時点の導入台数は3台で、2025年度中にさらに3台の増車が予定されている。
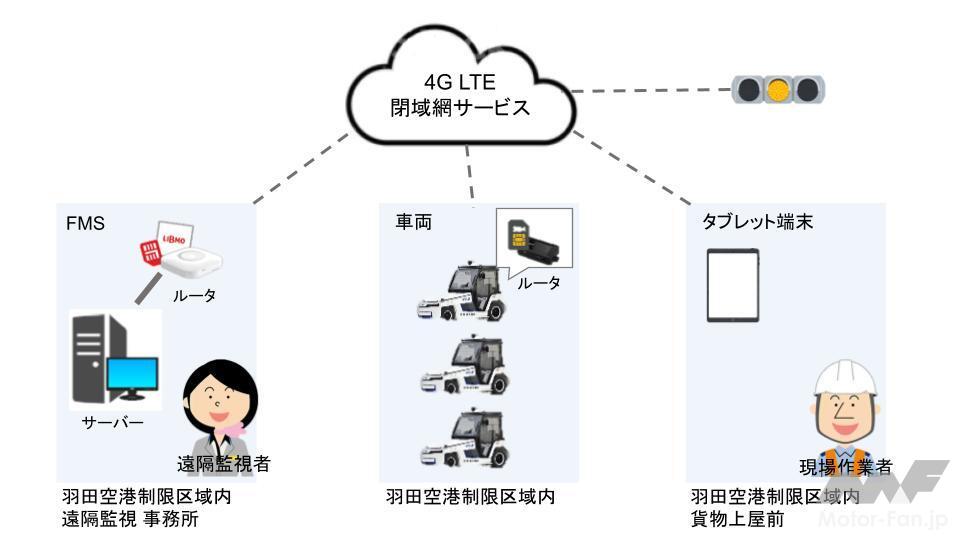
運用面では、複数台車両を用いた効率的なオペレーションの実現を図るため、豊田自動織機がANAの協力のもと開発した「Fleet Management System(以下、FMS)」が導入されている。FMSは車両への搬送指示・車両の運行管理に加え、限られたスペースを効率的に使用するための出発・到着レーンの自動割り当て、信号機制御との自動連動を行い、最新情報をタイムリーに一元化することができる。
| 場所 | 羽田空港 制限区域内 |
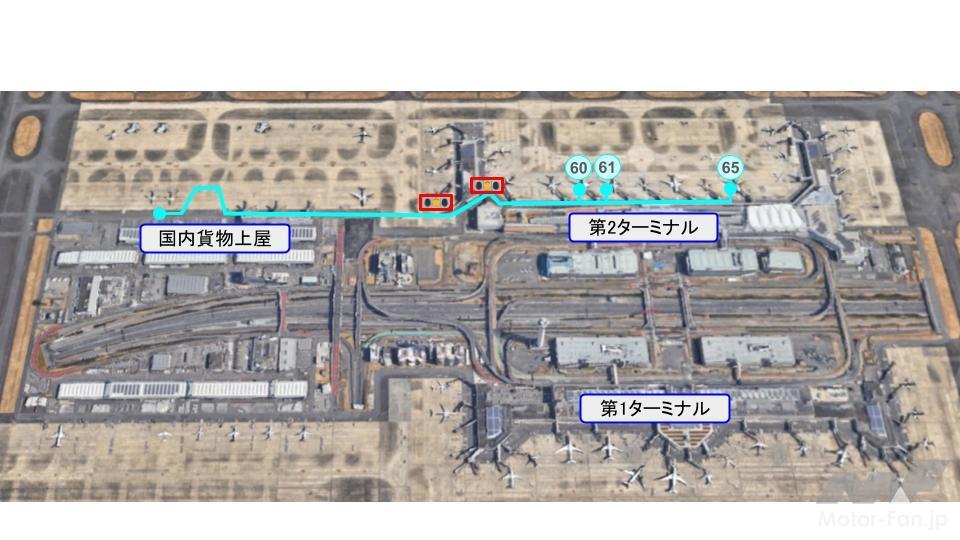
| 自動運転コース | ・第2ターミナル60・61・65番スポット〜東貨物上屋間(片道 約1.5km) ・走行経路上に2ヶ所の信号機があり、自動運転車両が従道路から主道路へ合流する際に手動運転車両へ一時停止を促す (下図、赤枠位置) |
| 車両 | 豊田自動織機製 自動運転トーイングトラクター(3ATE25) 3台 ※2025年度中に3台増車予定 |
| 速度(最大) | 自動運転時:15km/h、有人運転時:25km/h |
| 牽引重量(最大) | 自動運転時:13t、有人運転時:27t |
| 制御技術 | 路面パターンマッチング(RSPM)※4 GNSS(高精度衛星測位)、3D LiDAR※5、磁気誘導※6 |
【注釈】
- 空港等で、手荷物・貨物を収容した荷車・コンテナ等を牽引する車両
- 滑走路その他の離着陸区域、誘導路、エプロン、管制塔その他、立ち入りが制限されたエリア
- 特定条件下における完全自動運転。特定条件下においてシステムが全ての運転タスクを実施
- 車両に搭載したカメラで撮影した路面画像と事前に作成した路面画像マップデータをマッチングすることで、 車両の位置・姿勢情報を取得する技術。RSPM:「Road Surface Pattern Matching」は登録商標
- 対象物にレーザー光を照射し、その反射光を測定することで対象物までの距離を正確に測定できるセンサで、車両周辺状況の把握に使用
- 路面に敷設された磁気マーカの位置を車両に搭載された磁気センサで検知し車両位置を取得する技術
プレスリリースの関連記事

ヤマハが「移動」をアトラクション化! 新位置サービス「Mobilit.E.S」観光名所を音と演出で案内する

水滴ゼロで視界クリア、貼るだけで雨の日の運転が激変! オートバックスのPBが放つ超撥水ミラーフィルムの効果がスゴい!【CAR MONO図鑑】

トヨタ・ランクル250が盗難防止機能を強化! 丸目LEDライトの追加や安全機能の充実も注目


「PHEVは最高出力585馬力達成」ハイブリッド2種を展開する「メルセデス AMG GLE 53」改良新型

マツダEZ-6/マツダ6eが2026年「ワールド・カー・デザイン・オブ・ザ・イヤー」を受賞!
