三菱重工、下野市の自治医大線における自動運転バスの路車協調システム実証実験に参画
2025.12.23 11:30



三菱重工業は、下野・小山エリアで無人自動運転移動サービスの普及・拡大を図る取り組み※1 の一環として実施する、栃木県下野市のバス路線における自動運転バスの路車協調システム※2 の実証実験に参画する。対象のバス路線は「自治医大線」で、期間は12月15日から約2.5カ月間の予定。実施主体は国土交通省 関東地方整備局で、日本工営が全体を取りまとめ、三菱重工は日本工営から受注して、路車協調システムの設置/撤去とデータ収集を担当する。この路車協調システムの実証実験は、国交省の支援を受けて栃木県・下野市・交通事業者(関東自動車)が連携し実施する自動運転バス実証実験と協力して行われる。
今回の実証実験では、自動運転バスの発車時に路車協調システムが周辺情報を検出・送信することによって、自動運転バスの安全かつスムーズな運行を支援できるか検証される。
三菱重工の路車協調システムは、カメラ画像とAI分析を組み合わせることで、道路上の車両や歩行者を検出・追跡し、位置、移動方向・速度情報などに変換し、対象物のデータとして自動運転車両へ送信する。また、AI画像分析によりトラック・乗用車・二輪車といった車両の種別も判別可能である。センサーに比較的安価な単眼の光学カメラを用いることで、導入しやすい費用の設定が目指されている。
三菱重工ではこれまで、自動運転バスの死角となる交差点の脇道から接近する車両の検出や、自動運転バスが右折する際の対向直進車を検出して安全性向上を図る試験などを通じて、路車協調システムの実績を積んでいる。
三菱重工は、今後も自動運転バスの路車協調システムをはじめ、運行支援システムの開発を推進し、自動運転バスの社会実装に向けたソリューション活動を積極的に展開することで、人材不足が課題となるバス路線の維持、交通手段の確保に貢献する。
実証実験の概要
- 期間:2025年12月15日~2026年2月末(予定)
- 路線/区間:自治医大線/「自治医大駅」~「自治医大病院」停留所
- 実験内容:
- JR自治医大駅のロータリーに設置されたバス停留所から自動運転バスが発車する際、右斜め後方(ロータリー中央部)にある待機エリアから接近してくる車両を路車協調システムで検出し、位置や速度などの必要な情報を自動運転バスに送信する。車両搭載センサーで検知するには時間的余裕が少ないとされる右斜め後方からの車両接近に対する課題に対応することで、バス停留所からの安全な発車を支援する。
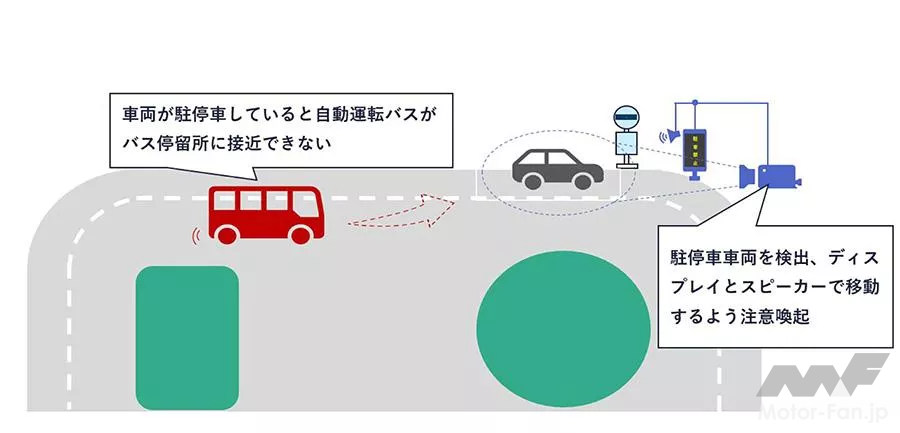
- JR自治医大駅のロータリーのバス停留所とその付近に一般車が駐停車した場合は、路車協調システムがその車両を検出し、表示や音声で移動するよう促すことで、自動運転バスのスムーズな運行を支援する。

【注釈】
- 栃木県では、無人自動運転移動サービスの普及・拡大を目指し、栃木県・下野市・小山市・交通事業者(関東自動車)が連携し、様々な実証実験が進められている。今年度、下野市においては自動運転レベル4での実証運行が目指されている。
- 当実験における路車協調システムは、自動運転車やコネクテッドカーのために開発された運行支援技術。このシステムは、車両から直接視認できない、または視認が困難な道路上の情報を、地上に設置されたセンサーで検出し、そのデータを車両に送信する。これにより、車両は周囲の状況をより正確に把握し、走行の安全性と効率性を向上させることができる。
プレスリリースの関連記事

プジョーのMPV「リフター」にパノラミックガラスルーフを特別装備した30台限定モデル「GTシエロ」が登場!

ルノー「カングー」と「ルーテシア」が5月1日より値上げ。購入予定の方はお早めに!

キャデラック「CT5」がマイナーチェンジ!次世代デザイン哲学と上質な走りが融合

ヤマハのスーパースポーツ「YZF-R7 ABS」がモデルチェンジ!電子制御スロットルなど充実の走行支援システムを搭載

日産が新型電動ミッドサイズSUV「NX8」を中国で発売。BEVのほか1.5Lエンジンを組み合わせるレンジエクステンダーモデルも設定
