海上自衛隊が「無人潜水艦隊」を創設か!? 将来に向けて研究が進む国産無人潜水艇【自衛隊新戦力図鑑】



TEXT:綾部剛之(AYABE Takayuki)
連載
自衛隊新戦力図鑑なぜ無人潜水艇なのか?
この10年で中国の海洋戦力は質・量ともに大きく増強され、南西諸島はもちろん西太平洋にまで、その活動領域を広げている。こうした中国の動きに対して、平時から警戒監視・情報収集を担っているのが「海の忍者」こと、海上自衛隊の潜水艦部隊である。海中に潜み、動きを察知されにくい潜水艦は、こうした任務に適している。中国による脅威の高まるなかで、海上自衛隊の潜水艦部隊は以前の18隻体制から22隻体制へと増勢された。
だが増勢したとはいえ、警戒監視任務の負担は大きく、また隊員数の慢性的な不足に苦しむ海上自衛隊にとって、潜水艦をこれ以上増やすことも難しい。そうしたなかで「水中優勢を獲得・維持するため」早期の装備化を目指して研究が進んでいるのが無人潜水艇であり、実用化に向けた研究のため、防衛装備庁 艦艇装備研究所において「長期運用型UUV」が試作された。

10mを超える大型無人潜水艇「長期運用型UUV」
「UUV」とは「Unmanned Underwater Vehicle」の略で「無人水中航走体」と訳される。UUVは、すでに機雷捜索の用途で海上自衛隊に導入されているが、これら既存のUUVが母艦の近くで運用される短距離・短期間のものであるのに対して、現在研究中の長期運用型UUVは文字通り、広い海洋における長距離・長期間の活動が見込まれている。
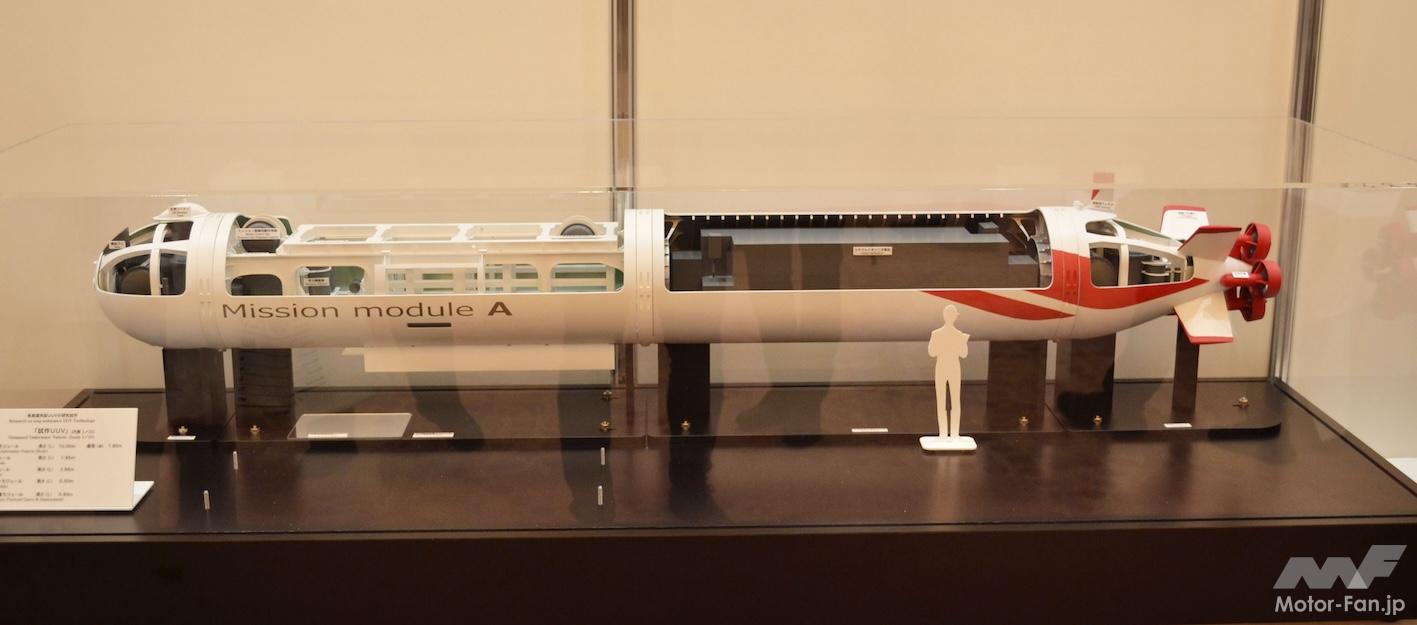
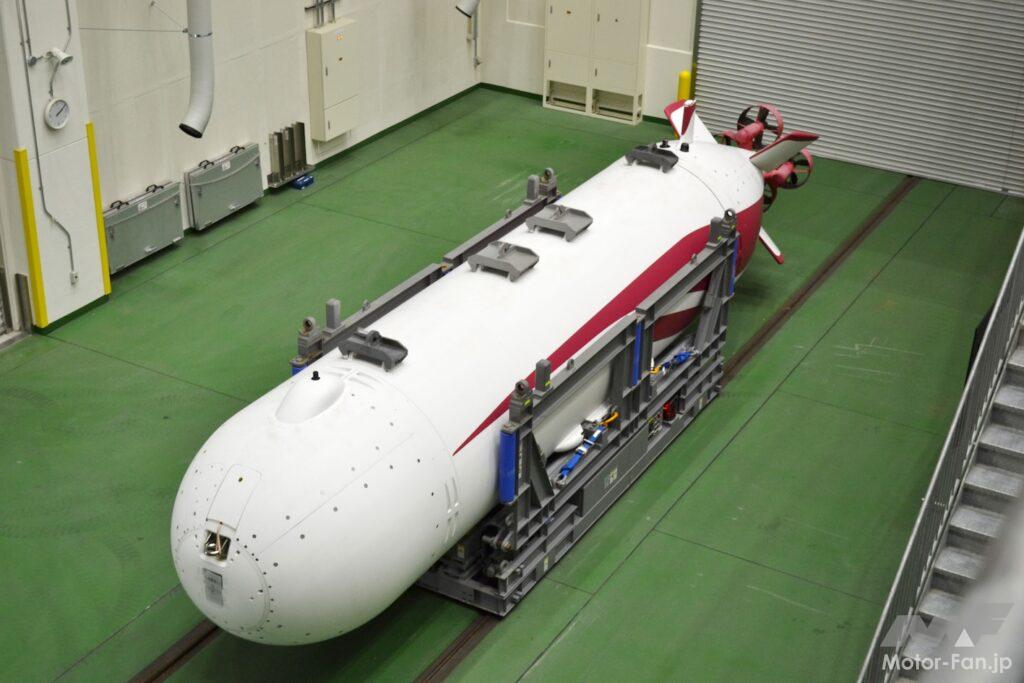
大きさもまったく異なる。既存の機雷探知用UUV「OZZ-5」が全長4m・直径0.5m程度であるのに対して、長期運用型UUVは航行に必要な基幹部分(本体モジュール)だけで全長10m・直径2m程度とかなり大きい。大型化した理由の一つは、長期運用に必要な動力源の搭載だ。長期運用型UUVの巨体のかなりの部分は、リチウムイオン電池を搭載する区画が占めている。
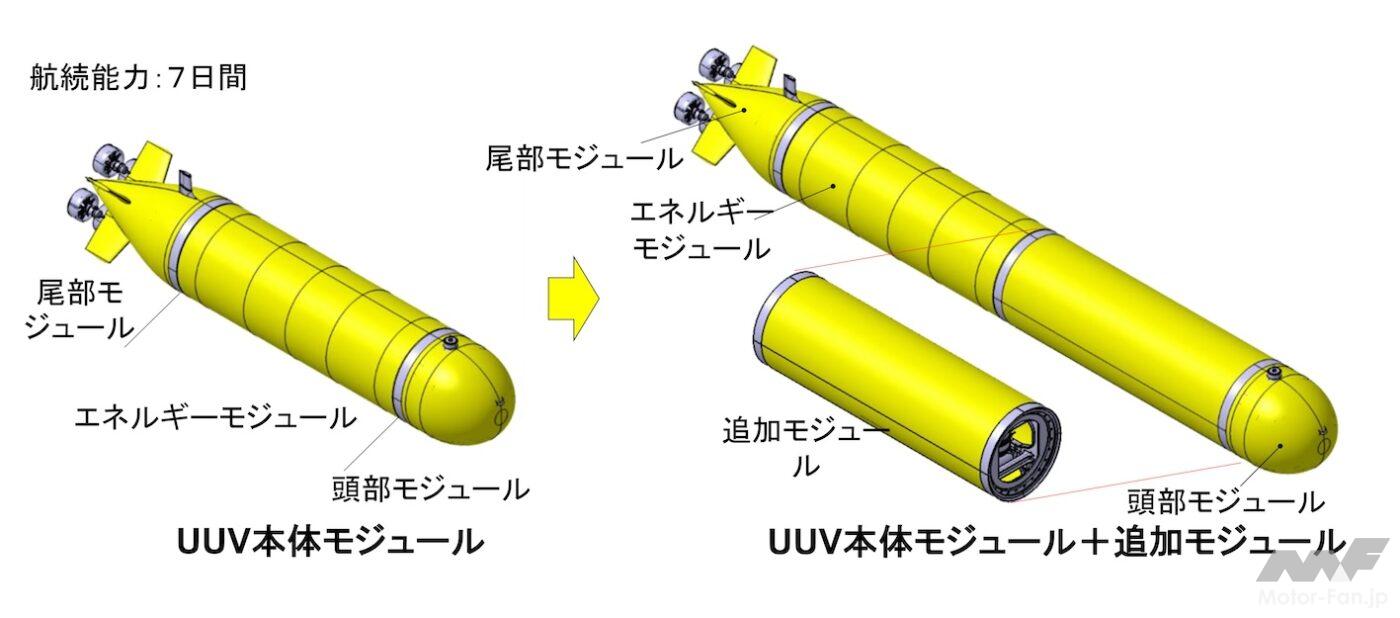
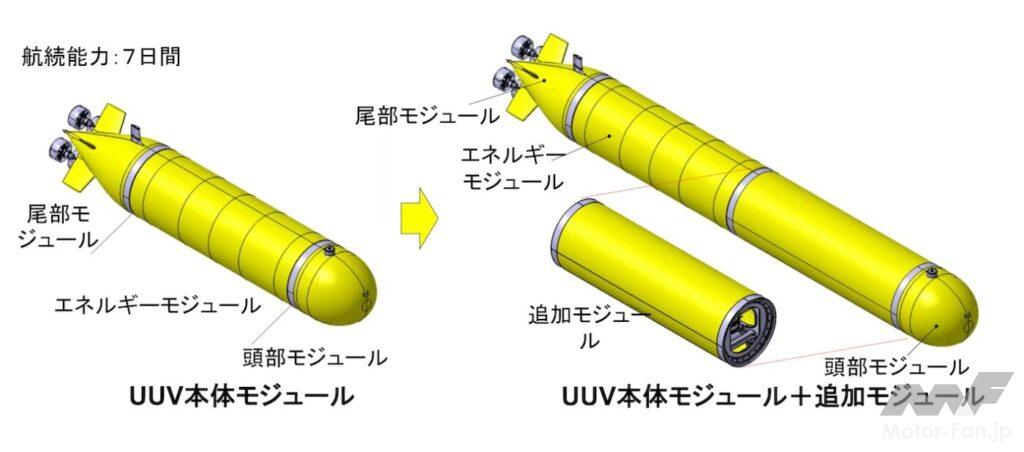
長期運用型UUVは、モジュール構造を採用している。先頭部分が航行に必要な各種のセンサーを搭載した「頭部モジュール」、次にリチウムイオン電池を搭載した「エネルギーモジュール」、最後がスクリューや舵など推進装置を備えた「尾部モジュール」である。これら航行に必要な機能を備えた3つのモジュールをまとめて「本体モジュール」と呼ぶ。さらに、警戒監視や海洋観測など機能別の追加モジュールを組み込むことで、多様な任務に対応できる設計となっている。
自律航行の技術的ハードル
その能力に期待が高まる長期運用型UUVだが、実用化には大きなハードルがある。それが人工知能(AI)による自律航行能力、つまり「UUVが自らの判断で航行して、任務を遂行する能力」である。さて、「無人機」といっても空中や地上、水上の無人機の多くは人間によって遠隔操作されている。なぜ、水中のUUVには自律能力が必要なのだろうか? 理由は水中では電波の減衰が激しく、無線通信ができないためだ(同様の理由でGPSも使えない)。
自律航行の何が難しいのか。「A地点からB地点まで向かう」というのは、簡単に思えて機械に実行させるのは、とても難しい。あなたが「とある駅から、目的のレストランへ」移動する状況を想像してほしい。まず「自分の位置を正確に把握」し、「向かうべき方向や距離を理解し」移動を開始する。UUVは、これを真っ暗な深海で行わなければならない。
トラブルに遭遇することもあるだろう。道路工事で通行止めになっていたら「別ルート」を考えなくてはいけない。事故に遭遇してしまったら「自分の状況を確認し、そのまま向かうか、帰るか」の判断が求められる。UUVも、不測の事態への対処と判断を自分で行わなくてはならない。そもそも「不測の事態が発生した」ことをUUV自身が認識できなければならない。
防衛装備庁では、長期運用型UUVの頭脳・思考とも言える管制ロジックの精度を高めるため、実際の海洋に加え、コンピュータ・シミュレーションを活用して運用データの収集と蓄積を行っている。

さて、以上のように実用化に向けて課題も多いが、長期運用型UUVが目指すコンセプトは広大な海洋を抱える日本の防衛において、とても重要な役割を担うことは間違いない。研究の推移に注目していきたい。









