
















PHOTO:編集部/NISSAN
交通の流れを妨げないスマートな自動運転

日産自動車は、横浜・みなとみらい地区の一般道を自動運転で走行する「リーフ」の実験車両の様子を公開した。
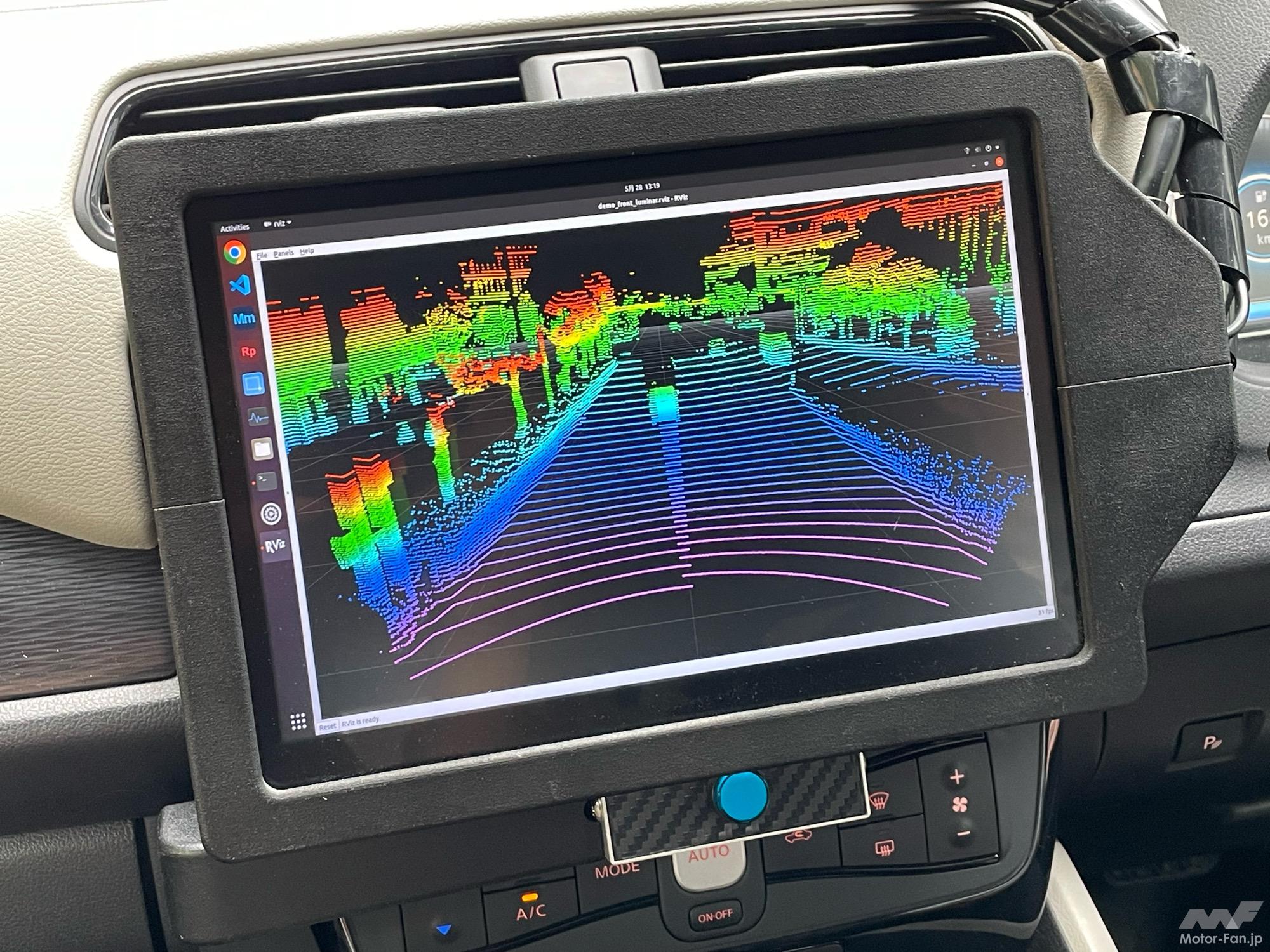
BEVのリーフをベースにした今回の実験車両は、従来の実験車両に対して性能が向上した6個のライダー、10個のレーダー、14個のカメラをルーフや車体側面など全方位をカバーするように搭載することで検出エリアを格段に広げると共に、より高精度の検出ができるようになった。車線変更や追い越し、交差点での車線交差など、無限に存在すると思われる交通状況・道路環境に対応する運転動作(ユースケース)を有限にするべく検証を行い、横浜で想定されるユースケースを2000個に絞り、そのすべてに対応し、より複雑なシーンにおけるスムーズな走行が可能となっている。

自動運転の“自然な運転”に驚いた!

編集部が取材のため同乗した実験車両のリーフは、横浜の日産本社をスタートして、みなとみらい地区の一般道を走行するルートが設定されていた。途中、交通量の多い片側4車線の大きな道路を走るコースだ。
日産本社を出発した実験車両は、大きな交差点に差し掛かると、対向車が通過するのを確認してから右折し、一般車と混走しながら制限速度まで加速、複数の車線がある道路では周囲の状況を認識し安全に車線変更を行った。もちろん赤信号もギクシャクすることなく落ち着いて停止する。

このように、スムーズに加速し交通の流れに乗った走行をするため、自動運転=ノロノロ運転といった印象はまったく受けない。むしろ、周囲の状況を的確に判断していていて、運転に不慣れなドライバーなどよりは、スマートで安心感のある運転という印象だ。


左折の大きな交差点に差し掛かったときは、横断歩道の歩行者を検知しつつも、歩行者が通り過ぎる前に実験車両は交差点を通過した。これは、歩行者の進む方向や速度を計算しているため、横断歩道上に歩行者が存在しているからといって、歩行者の通過まで必ず待つというわけではなく、自動運転のプログラムとして先に進める場合は、歩行者の通過を待たずに交差点を左折してしまうという判断を行うそうだ。このあたりはドライバーの思考と同様の判断になるようにプログラムされている。また、他車や歩行者の微細な動きも検知することで危険を予測して「かもしれない運転」を行っているという。


自車で対応しきれないイレギュラーな状況に陥った場合(例えば、左折しようと思った交差点の直前でタクシーが客の乗り降りのため停車してしまった場合、それが駐車車両なのかすぐに移動する車両なのか判断つかない場合など)、遠隔監視から自社の状況を確認し、正しい判断の回避行動を車両の送信しイレギュラーな状況を脱出する。

ドライバーレス自動運転の実用化に向けたロードマップ

日産は、 2017年度より自動運転モビリティサービスの実証実験を実施しており、 2027年度をめどに自動運転モビリティサービスの「乗り合いシャトル」を日本国内で事業化することを目指している。
その実現に向け、2024年度の第 4 四半期から神奈川県の横浜みなとみらい地区にて「セレナ e-POWER」の実験車両による走行実証実験を開始し、2025年度以降は実験を行う地域や規模を拡大。これらの実験では、将来のドライバーレスでのサービス提供を目指して自動運転レベルを段階的に引き上げながら、ユーザーの使い勝手も含め総合的に実験を行う予定だ。
なお、本取り組みは経済産業省、国土交通省をはじめとした中央省庁と密に連携しながら推進し、経済産業省と国土交通省が主催する『レベル 4 モビリティ・アクセラレーション・コミッティ』において、新たな自動運転移動サービスの実現に向けた取り組みを促進していく。尚、今回公開された走行実験は、安全面を考慮し、セーフティドライバーがいるレベル 2 で実施している。
具体的な取り組み計画は以下の通りとなっている。
2024年度:
横浜みなとみらい地区にて、「セレナ e-POWER」をベースとした自動運転車両での走行実証実験を実施。
2025-26年度:
横浜みなとみらい地区(桜木町、関内を含む横浜エリア)において、最大20台規模のサービス実証実験を実施 (遠隔監視+セーフティドライバー同乗)。オンデマンドで地域内を自在に走行し、無人サービスに対する受容性を検証するとともに、日常的に取得される走行データによる性能開発を行う。
2027年度:
動運転のレベルを段階的に引き上げていき、有償サービスの提供を開始。また、地方を含む3から4の市町村においてサービス提供開始を目指す。全国で数十台規模の運用を予定。現在、サービスの開始に向けて複数の自治体と協議しており、準備の完了した市町村から事業の開始を目指す。













