スバル・鹿島建設、光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を開始
2025.06.26 09:37



鹿島建設とスバルの2社は、2025年日本国際博覧会(大阪・関西万博 以下、万博)会場へのアクセス道路として使用されている高速道路※1において、大阪市の協力のもと、アスファルト舗装の内部に光ファイバセンサケーブルを敷設し、光ファイバセンシング技術を用いた路車協調型自動運転※2の実証実験を開始したことを発表した。
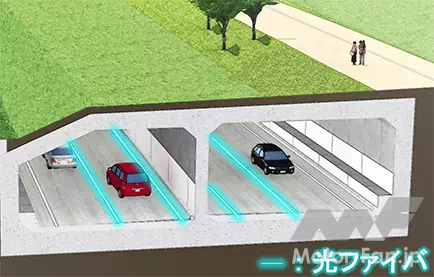
路車協調型自動運転の実証実験を行う様子
(イメージ図)
鹿島とSUBARUは、未来のモビリティ社会における安全な道路インフラの実現および交通事故の低減を目指し、2024年9月よりスバル研究実験センター美深試験場(北海道中川郡美深町)の高速道路を模した周回コースにおいて、鹿島の光ファイバセンシングおよびSUBARU技術研究所の協調型自動運転※3の技術を用いた路車協調型自動運転の共同研究を進めている。当該研究においては、道路側からの低遅延かつ正確なデータ通信を要する路車協調型自動運転の試験が厳冬期環境下にて実施された。これらの研究成果をもとに、阪神高速道路の「コミュニケーション型共同研究制度」を活用し、2024年12月より「光ファイバセンシング技術を用いた道路インフラの自動運転支援技術」に関する実証実験が開始された。
光ファイバセンシング技術を用いた路車協調型自動運転の実証実験を行う様子
この度、2社は、万博会場へのアクセス道路として使用されている高速道路※1に光ファイバセンサケーブルを敷設した。当該区間においてシャトルバスや実験車両を走行させ、道路に作用する走行荷重による振動やひずみを検知・計測し、道路および交通管理に資する道路モニタリングが行われる。道路モニタリングによってリアルタイムに得られる車両位置情報を自動運転車両と情報共有することで、車両位置の検出が困難なトンネル内での合流をユースケースとして、路車協調型自動運転の実証実験が行われる。
なお、テストコースならびに高速道路における光ファイバセンシング技術を用いた路車協調型自動運転の実証実験は、いずれも日本初の事例である。
【注釈】
- 阪神高速道路 淀川左岸線(2期)海老江区間
- 自動運転車両と道路インフラ、周辺を走行する車両およびサーバーなどとの間で情報を通信することにより自動運転車両の走行を支援する自動運転システム
- 自動運転車両と周辺を走行する車両およびサーバーなどとの間で情報を通信することにより自動運転車両の走行を支援する自動運転システム
- 0次安全、走行安全、予防安全、衝突安全+つながる安全
- SUBARU車乗車中の死亡事故およびSUBARU車との衝突による歩行者・自転車等との死亡交通事故ゼロを目指す
プレスリリースの関連記事

キャデラックの旗艦SUV「エスカレード」が一部仕様変更でACCにレーンセンタリングアシストが追加!

スバルの軽トラ「サンバー トラック」が一部改良!“スアマシ”の機能拡充で安全性がさらに向上


一部改良版メルセデス・マイバッハ Sクラスがデビュー「最高級サルーンにふさわしい荘厳な仕上がり」

黄ばみヘッドライトが新品級に!? 白ボケ樹脂が黒ツヤ復活!? 2年持続の神コーティング、プロ級補修の“最終手段”が登場! 【CAR MONO図鑑】

後席が丸ごと守れる、汚れ・キズ完全ガード! 5層構造でペットも子どももOKのシートが便利すぎる! 【CAR MONO図鑑】






