トヨタの「知能化技術」は、ヒト、クルマ、インフラの三位一体での「交通事故ゼロ社会」への取り組みだ












TEXT:世良耕太(SERA Kota)PHOTO:長野達郎(NAGANO Tatsuo) FIGURE:TOYOTA
ここから先は「インフラとの協調」と「行動予測」
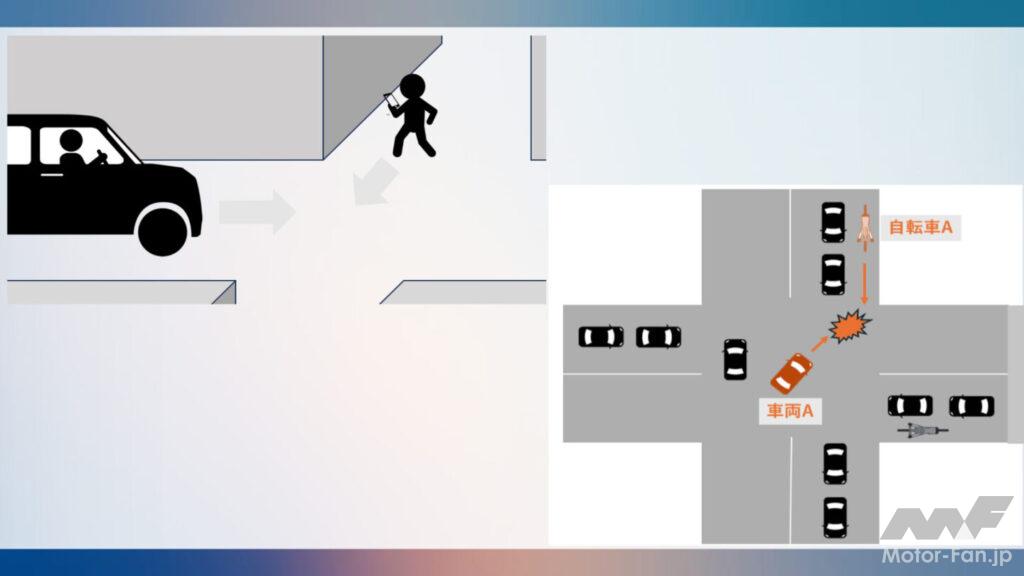
デジタルソフト開発センター センター長の皿田明弘氏は、「クルマの安全性能向上などにより事故は減ってきたものの、最近は頭打ちになっています。この先『事故ゼロ』という大きな目標の実現に向けては、クルマ単体のレベルアップだけでは困難です」と、国内における現在の状況を説明した。追突事故などは大幅に減少しているが、「死角がある交差点での出会い頭や、歩行者や自転車の予期せぬ飛び出しなどによる事故」は残念ながら、それほど減少していない。

こうした不幸な事故を減らすには、ヒト、クルマ、インフラの三位一体となった取り組みが重要だというのが、トヨタの考え方だ。なかでも、「インフラとの協調」と「行動予測」が重要だと認識している。例えば交差点では、死角にいて見えない車両を道路側にあるセンサーで検知し、通信技術を利用して車両に通知する技術開発に取り組んでいる。そのためには高速で切れ目ない高品質な通信が必要だ。
また、管制システムも重要だという。高速道路で合流するシーンでは、さまざまなクルマが合流車線や本線上にいるので、合流がうまくいかず、交通流を乱すことがあり、ときに危険な状況を招くことがある。そこに管制システムを導入することによって交通流の全体最適化を図り、各車両が協調的に合流できるようになる。
交通状況を俯瞰的に捉えつつ、これにドライバーの心理を加味して行動予測を行ない、対応すれば、事故を回避したり、衝突被害を軽減したりすることができるようになる。
「2秒、3秒、5秒の予測ができると世界が変わります。予測するだけでなく、ヒトの行動を変えていくように促すことでも事故を低減していきたいと考えています。(ヒト、クルマ、インフラの)三位一体の開発は、ソフトウェアプラットフォームであるArene(アリーン)により加速させていきます」(皿田氏)
ITS試験場でインフラ協調の開発技術を体験

市街地の信号交差点などを再現したITS試験場でインフラ協調の開発技術を体験試乗した。まず、指示されたとおりに直線路を40km/hで走る。と、物陰からサッカーボール大のゴムボールが飛び出してきた。避けきれるはずもなく、フロントガラスに衝突。その直後、子供(の人形)が飛び出してきた。慌ててブレーキを踏む。自動ブレーキでは対処できないシチュエーションだ。
次にインフラ協調を利用した状態で同じシーンを体験する。すると、今度はAIエージェントが「危ないかも」と話し出す。次の瞬間ピンポンと警報音が鳴り、自動ブレーキが作動。物陰から子供が飛び出す前に停止することができた。交差点にカメラと通信機が設置されており、交差点の状況を監視。その情報をクラウド経由でサーバーに上げ、デジタルツインを作成。時々刻々と変化する交通参加者の動きを把握しながら、飛び出しの危険等があればその情報を該当するクルマに転送する。
その情報を受けてAIエージェントが注意喚起。それでも衝突の危険がある場合は自動ブレーキをかけて事故を回避する仕組み。対向車にも運転支援系のセンサー(カメラなど)が付いているので、これらの情報も自車と同じようにクラウドに上がる。死角からの飛び出しに対処する仕組みはインフラ側との路車間通信で成立させることもできるし、クルマ同士の情報で補完しあうことで機能させる車々間通信でも可能。トヨタは路車間、車々間、両面で技術開発を行なっている。
それこそ交差点は無数にある。まずは事故統計のデータをもとに危険度の高い交差点からインフラを整備していくことになるだろう。とはいえ、トヨタ単独では実現結しない。国と一体となってムーブメントを起こす必要がある。トヨタはすでに愛知県豊田市某所で実証実験を始めている。
スマートポールとはなにか?

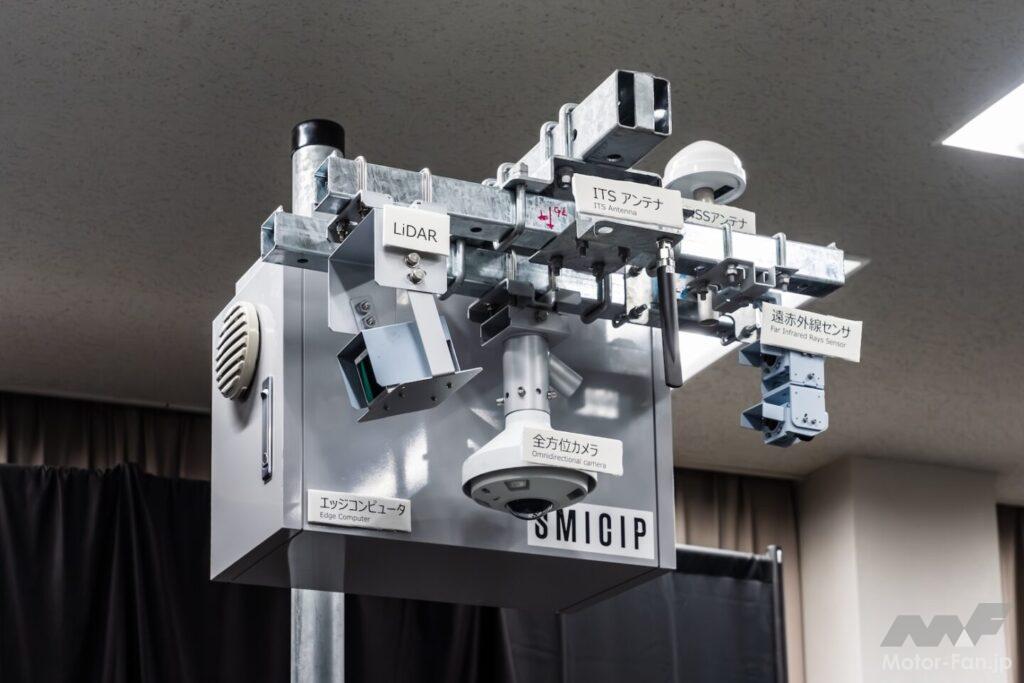
研究所の施設内にスマートポールと呼ぶインフラセンサーが展示されていた。交差点全体の状況を捉えてクラウドに上げる役割を担う。スマートポールが備える機器は、全方位カメラ、LiDAR(三次元スキャナー)、遠赤外線カメラ、ITSアンテナ、GNSSアンテナ、エッジコンピューターである。
センサーが複数あるのは、冗長性を確保するためでもある。GNSSアンテナはGPSから時刻信号を受信し、センサーを同期させるため。ITSアンテナはクルマとのデータをやりとりするためである。センサーで捉えた情報、例えばLiDARでは点群データが取れるが、この点群データから人やクルマなどの情報をXYZの座標軸にし、データを軽くしたうえで情報をクラウドに送る。こうした処理を行なうのがエッジコンピューターだ。


路車間通信による事故ゼロを実現するために重要なのは、通信が低遅延であること。これを実現するために通信手段・計算処理の基盤づくりも行なっている。交差点のインフラやクルマからの情報をクラウドに集め、クラウドからフィードバックをかける方式では、処理が遅くなる課題があった。そこで現在考えられているのがMEC(Multi-access Edge Computing)の利用である。5Gの登場とともに出てきた技術で、ミニクラウドのようなもの。交差点とクラウドの中間にあるMECで情報処理を行なうことで、処理が分散され、距離も短くなって遅延を限りなくゼロにできるという。
また、5Gを利用しても通信が集中すると通信速度は落ちてしまう。これを避けるために、決められた帯域を優先的に使用する優先通信レーンを利用することでリアルタイム通信を実現していこうと、通信事業者と協議しているという。
AIエージェントのサポートがあると……
屋内の展示スペースでは、インフラ協調による「先読み技術」の紹介があった。インフラセンサーでとったデータをもとにデジタルツインを作成するのは、ITS試験場の交差点で得た情報を元に先読みし、処理した情報を車両に送る仕組みと同じ。ドライビングシミュレーターで再現していたのは、雨が降る夜の交差点で右折するシーンである。
対向車線をひっきりなしに車両が通過するので、ドライバーは切れ目がやってくるタイミングに気を取られ、右折した先を横断する歩行者に気づくのが遅れてしまい、ヒヤッとする。交差点全体の情報から数秒先にどういったリスクがあるかを先読みし、ドライバーに知らせるのが新技術。「対向車だけでなく、横断歩道にも注意しないとね」とAIエージェント。
右折する際、余裕がある段階でこの言葉を投げかけられると、ドライバーは「横断歩道に注意しないといけない」「安全な速度で交差点を通過しなければいけない」と自然に意識し、ヒヤリとする状況を減らすことにつながる。ドライバーの心理状態に応じて投げかける言葉を変えることで、よりきめ細やかに対応することが可能になり、ドライブがより安心、安全になる。次も心理を加味した事例。夫婦が夕暮れどき、片側複数車線の道路をドライブしている。
AIエージェントなし
妻「あそこ、新しいお店できているよ」
夫「ほんとだ。(ロードサイドの店舗に気を取られて、自車線に割り込んでくる車両に気づくのが遅れる)あ、危ない!」
妻「もー、ちゃんと前見てよ」
夫「ごめん、ごめんん」
妻「そういえば昨日の夜、帰り遅かったね」
夫「会社でいろいろあって、気分転換していたんだよね」
妻「何してたの?」
夫「(焦った様子で)いや、何って……(左折の際、横断歩道の歩行者に気づくのが遅れる)、危ねー」
妻「で、何してたの?」
夫「いや、ちょっとね」
ロードサイドの店に気を取られた隙に割り込まれ、ヒヤッとしたし、イラッともした。その後の妻の問いかけに動揺し、注意力が散漫になり、交差点を左折する際、横断歩行者に気づくのが遅れ、ヒヤッとしたというシーンである。AIエージェントのサポートがあると、次のようになる。
AIエージェントあり
妻「あそこ、新しいお店できているよ」
夫「ほんとだ。あ、危ない!」
AIエージェント「危なかったね」
夫「そうだよね。気をつけるわ」
妻「そういえば昨日の夜、帰り遅かったね」
夫「えーっとね、それは」
AIエージェント「つっちー(夫の愛称)、ここ左折注意」
夫「あ、はーい。会議が長引いちゃったんだよねー」
妻「毎日大変だね」
夫「そうだよね」

クルマが割り込んできたシーンではイラッとする夫に代わってAIエージェントがとっさに「危なかったね」と言った。このひと言でドライバーが冷静になる心理学的なテクニックだという。交差点に差し掛かったシーンでは、妻の問いかけ(問い詰め?)に焦り、注意力が散漫に。この状況でAIエージェントが注意喚起。これにより、交差点で周囲を確認する心理的な余裕が生まれた。
ドライバーが場面場面でどういった運転(操作)をするのか。これを予測するには、ドライバーのことを心情の変化だけでなく体調の変化も含め、深く理解する必要がある。心情の変化は千差万別なので、ドライバーとAIエージェントとの会話のやりとりを含め、日々の運転を通じてさまざまな情報を収集し蓄積。これによりAIエージェントが成長し、より賢くなっていく。ドライバーの心情に応じた先読みをして対処することにより、事故ゼロに一歩でも二歩でも近づきたい。トヨタはその思いで開発に取り組んでいるという。
インフラ協調と管制センター、それにAIエージェントとの組み合わせで実現する「高速道路でのスムーズな合流」に関し、テストコースでデモ同乗試乗を体験した。高速道路の合流が苦手な人でも、管制センターからの指示に運転支援モード、あるいはAIエージェントからの提案を利用することで、スムーズな合流が実現する、というデモだ。
体験したシナリオは4パターン。ひとつめのパターンはこうだ。合流車線から本線に合流しようとしたが、本線上にクルマいたし、自車の前にもクルマがいてタイミングとスペースが見つからず、合流に失敗した。するとAIエージェントが次のように話しだす。
「これは合流できないよね。さ、気を取り直してこの先も安全運転でね」
ドライバーの焦りや気分の落ち込みをAIエージェントが代弁した格好。これを聞くことにより気持ちにひと区切りがつき、合流の失敗を引きずらずに済んで安全運転につながるとトヨタは考えている。

ふたつめは本線に合流する際、「合流するね」のAIエージェントの提案に対し、ドライバーが「いいよ」と反応。すると、自車は自動で車線変更を行ない、無事に本線に合流することができた。このとき、自車も含め周囲を走るクルマの位置や速度の情報をクラウド側の管制機能で把握し、どの車両がどの順序で動けばスムーズに合流できるか計算。結果を各車に配信し、配信された車両が指示に従うことでスムーズな合流が実現する。このケースでは、管制センターから指示を受けた本線上の車両が隣のレーンに自動で車線変更したことで、合流するスペースを生んだ。高速道路を走る各車がインフラとつながっていることで実現する動きである。
みっつめも管制機能がなく、合流できなかったケース。合流側車線を走る車両に譲る気はあったが、隣のレーンにクルマがいたので車線変更することができず、合流車のためのスペースを作ってあげることができなかった。このときのAIエージェントの語りかけは次のようになる。「譲ってもらえなかったね。さ、気を取り直してこの先も安全運転でね」
よっつめはみっつめと同じ状況で、管制機能がある場合だ。本線を走る車両に管制センターから指示が飛び、車線変更ではなく緩く減速してスペースを作る。おかげで、ふたつめのパターンと同じように無事、本線に合流することができた。
ヒト、クルマ、インフラの三位一体で取り組むことで、より安全性が高まり、事故ゼロに近づけていく。事故による悲しい思いを繰り返さない。これを強く願い、本気で技術開発に取り組んでいることをトヨタは示していた。






