
クルマの三大基本機能「走る・止まる・曲がる」、この性能向上を追求してほぼ二世紀。産業の旗手として一世紀。「安全性・低公害性などを求めて半世紀。それぞれの時代を支え、人々の夢に応え、モータースポーツの道を拓き、今や新たなる
「モビリティの世界」を拓こうとしています。
その横綱格の「自動運転システム」、片や環境保全の「EVシステム」。それぞれが競い、そして支え合いながらの新たな頭脳のモビリティ社会、その共創に向けて歩み始めています。期待したいです。
自動運転の制御技術には、システムに組み込まれた高質のアルゴリズム(算法)、高度な情報処理、移動環境情報の高速・高質センシング、その情報処理の適切さと正確さなどが求められます。すでに、メーカーをはじめ、情報企業や研究機関の先進かつ着実な取り組みによって、これ等の具体的成果が蓄積され、いよいよ実装の自動運転を迎えつつあります。
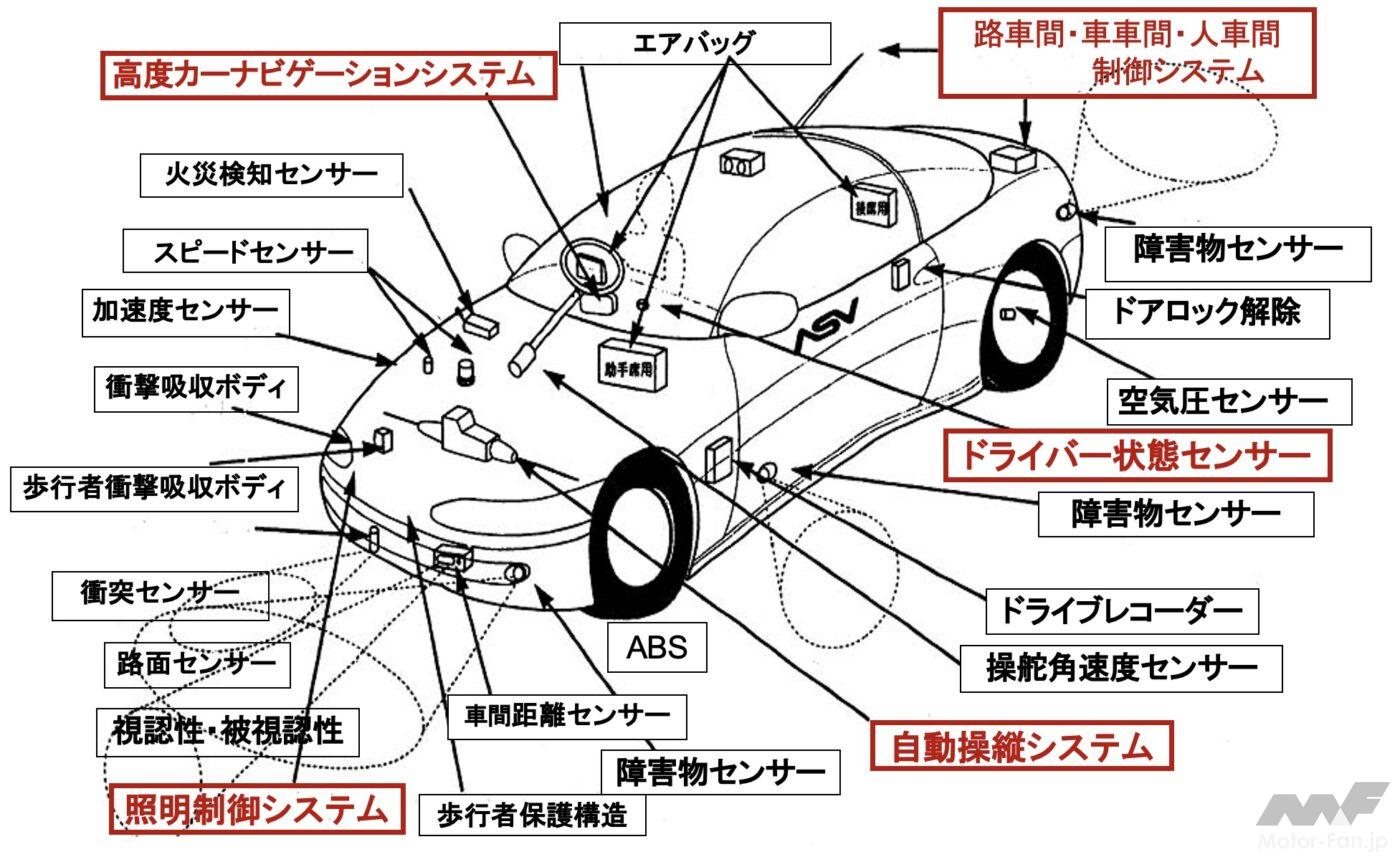
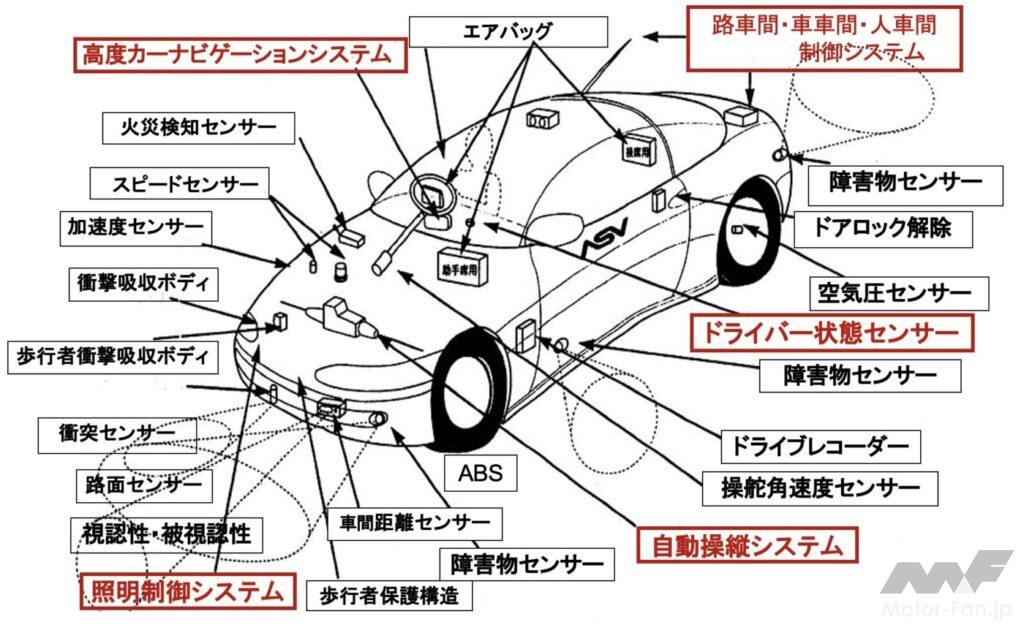
たとえば、車両の安定走行を支える「路車間制御」は、タイヤ路面間に働く力「コーナリングフォース」を維持するためにスピードセンサ、空気圧センサ、路面センサによって自動的に車速や車間距離を調整します。
「車車間制御」は、障害物センサ」や車間距離センサ、操舵角速度センサ、そして自動操縦システムなどにより行ないます。「人車間制御」も同様です。「自動操縦システム」は、路面センサ、スピードセンサ、障害物センサ、車間距離センサ、加速度センサにより最適な走行制御を行ないます。
「照明制御システム」は、対向車への配慮もありますが、道路照明のない山道などでの右左折道路で、可動式ヘッドランプによる進路照明が期待されます。かつて、チェコスロバキアのタトラ(三つ目の高級乗用車)のロードテストをモーターファン誌(三栄書房・鈴木修己社長)主催により行なった際、輸入にあたり運輸省は「三灯式かつ可動式の規定」がないために中央の一灯を切除。何とも侘しい限りでしたが、致し方なくそのままテストを実施した次第です。
図に示す「ドライバーの状態センサ」は、高齢化社会に向かう折から、安全なモビリティ社会の維持・管理のためには重要な課題といえましょう。但し、自動運転のモビリティ社会の実現においては、二次的なものとなりましょうが、それまでは極めて重要なシステムといえましょう。





