連載
シン自動車性能論クルマによるモビリティの領域では、ヒトがスピードを享受し続けるために安全・安心の制御が不可欠です。その制御行動を運転メカニズムの内容を通して考えてみます。
一般に、運転者は進路の情報を受け取り、判断をして必要な操作を行ない、刻々変わるクルマの状況を受け止め、図に示すフィードバック回路(Ⅰ)(Ⅱ)の内容を常時確認し、必要があれば修正して走行します。至って簡単のようですが、これは制御理論の伝達関数によって数式化していますので、現実は複雑です。この運転制御は、一般には比例動作、積分動作、そして微分動作によって構成され、それぞれがむだ時間(いわゆる反応時間)をもっています。例えば、停止線で止まるときや先行車との追随距離などを調整する場合は、比例動作が主でして、この比例演算制御は最も容易なものです。前車の追い越しなどで進路修正や速度調整を行う積分動作はそれなりに難しいです。
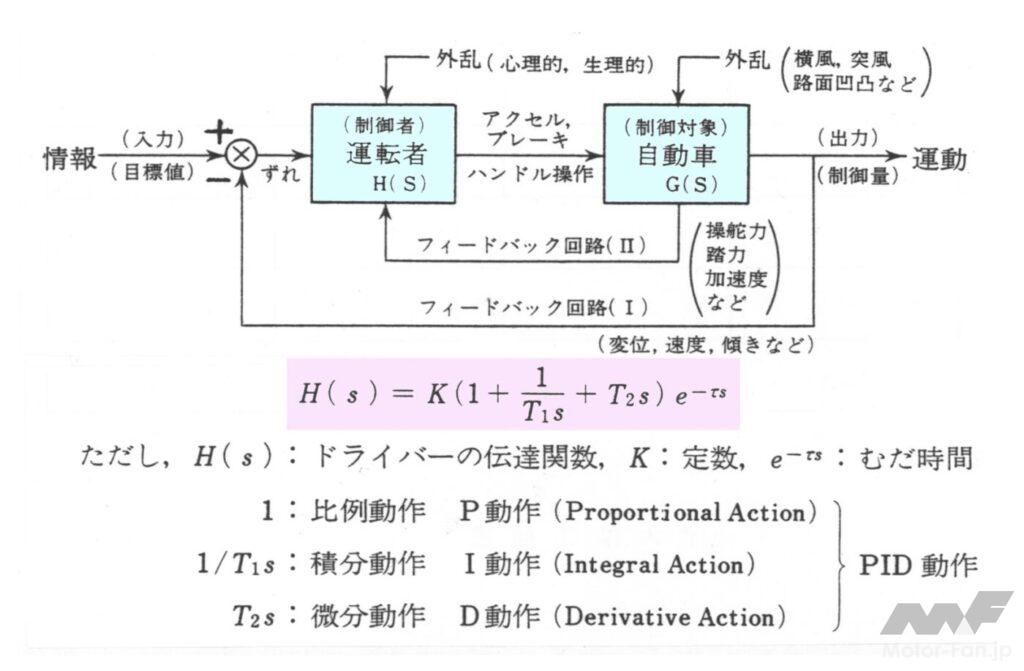
さらには、対向車などの動きを予想しタイミングを計っての進路修正、障害物緊急回避などでの急激な加減速やハンドル操作などを行なう微分動作は、複雑の極みです。クルマの運転は、変位(位置)制御・速度制御・加速度制御・加加速度(ジャーク)制御の順に難しくなります。ただし、ゆとりを持っていれば、これ等の演算そして操作は習得され、制御可能ですが、時間的余裕のない緊急事態になると事は重大です。脳の演算回路の破綻、誤操作なども生じかねません。
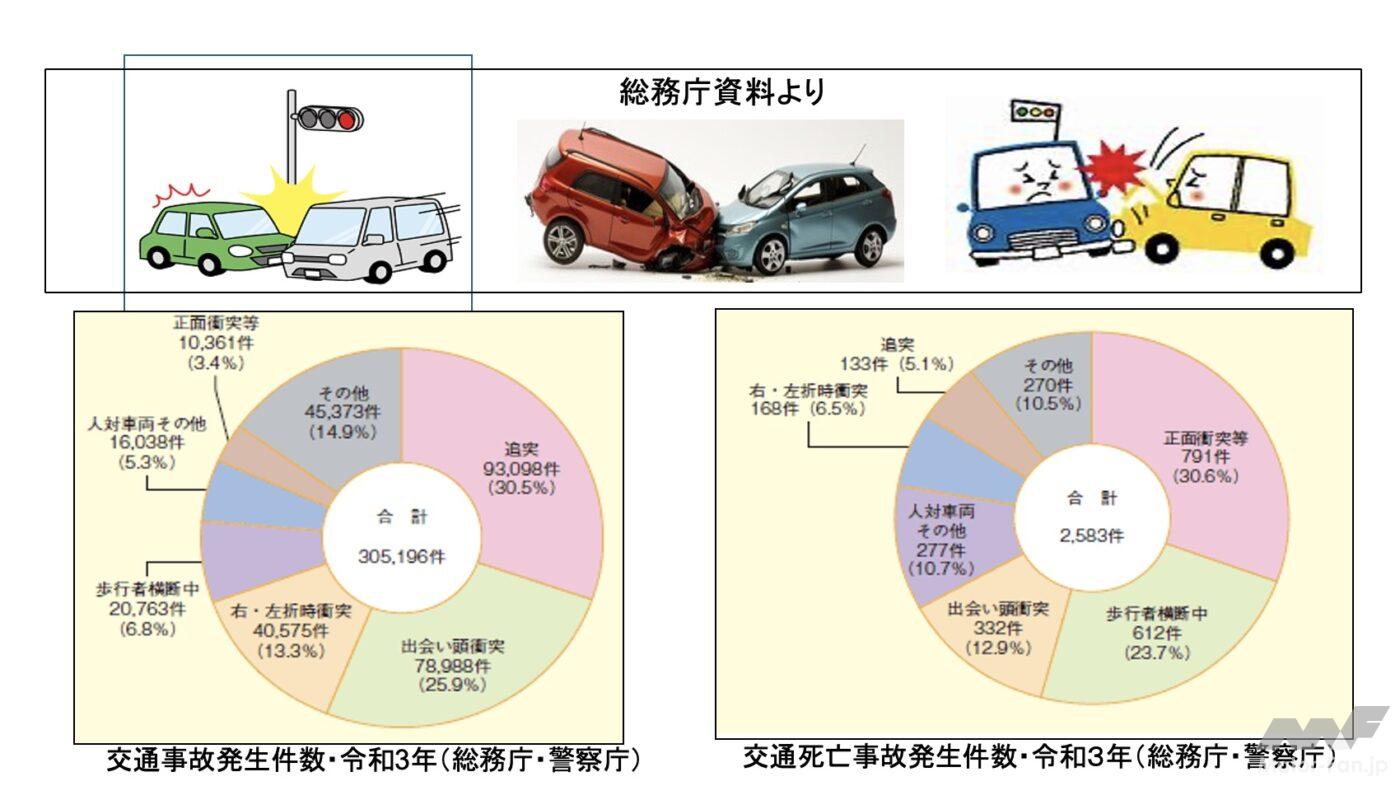
そして、ドライバーへのフィードバック回路の操舵力、踏力、加速度などは、スムースな運転を行なうための情報として重要です。例えば、厚手の手袋や履きなれない底厚の靴は、操作力のフィードバックが不十分となるため、微妙な運転制御ができなくなり、その操作が増幅しますと極めて危険です。ドライバーへの外乱には、イライラやカリカリなどの精神的な破綻、疲労や痛みなど生理的なものがあります。車両への外乱は突風や路面の滑り易さなどです。近頃、高齢化社会の課題として浮き彫りになり始めたブレーキとアクセルの踏み間違えがクローズアップされています。これは制御特性以前の課題でして、免許返納の決断力の問題であり、一方では自動運転への期待を示すものでもありましょう。