【これからどうなる自動運転】GNSSやV2Xって聞いたことある? クルマの自動運転に興味があるなら、知っておきたい注目ワード
自動運転やBEVに興味があるなら知っておきたい10のキーワード_後編


過去5回の講義で自動運転についての知識を深めてきた。そこで今回と次回は自動運転の総集編として、改めて気になる“キーワード”を解説。多くのクルマが獲得したレベル2から手の届くところまできたレベル3など、その全容を探る。
KEYWORD 06 ▶ テイクオーバーリクエスト
レベル2だけではく、レベル3でもハンズフリーやハンズオフが可能です。そこには法律上、大きな差があります。レベル2で一定の条件が整った状態で行うハンズフリーやハンズオフの場合、レベル2なので運転の主体は運転者になります。そのため、運転者はクルマの運転をしている時と同じように車外へ注意をし、安全を確保し続けなければなりません。それが、レベル3になると一定の条件でハンズフリー/ハンズオフになっても、車外への注意はある程度で対応すれば良くなります。なぜならば、運転の主体がクルマのシステムになっているからです。ただし、例えば天候が悪化してセンサーが作動しないとか、システムにエラーが生じたなどで、クルマのシステムでの運転続行が難しくなると、運転者に対して運転の復帰を要求してきます。これを、テイクオーバーリクエストと言います。車内での音声、ダッシュボードなどでの表示、そしてシートベルトの振動などで知らせます。

KEYWORD 07 ▶ GNSS
グローバル・ナビゲーション・サテライト・システム(ジー・エヌ・エス・エス)のことです。衛星測位システムを指しますので、一般的にはGPSとして知られている仕組みです。自動運転では自車位置を特定することが重要な要素のひとつである場合が多くあります。そもそも、GNSSという考え方の中に、アメリカのGPS(グローバル・ポジショニング・システム)が含まれます。GPSの仕組みは、アメリカが打ち上げた軍需用の30数基の衛星から地上に送られてくる時間の信号をGPS受信システムで受信します。その信号を受信した時間との差から衛星までの距離を測り、それを最低4基で行うことで、自分の位置が分かるという仕組みです。アメリカは90年代のクリントン政権時、軍需衛星の一部の信号を民需用に無料開放したことでGPSが普及。さらに、ロシアのGLONASS(グロナス)、欧州Galileo(ガリレオ)、そして日本はGPSに準拠する準天頂衛星などがあり、それらの複数を日本では組み合わせて使っています。
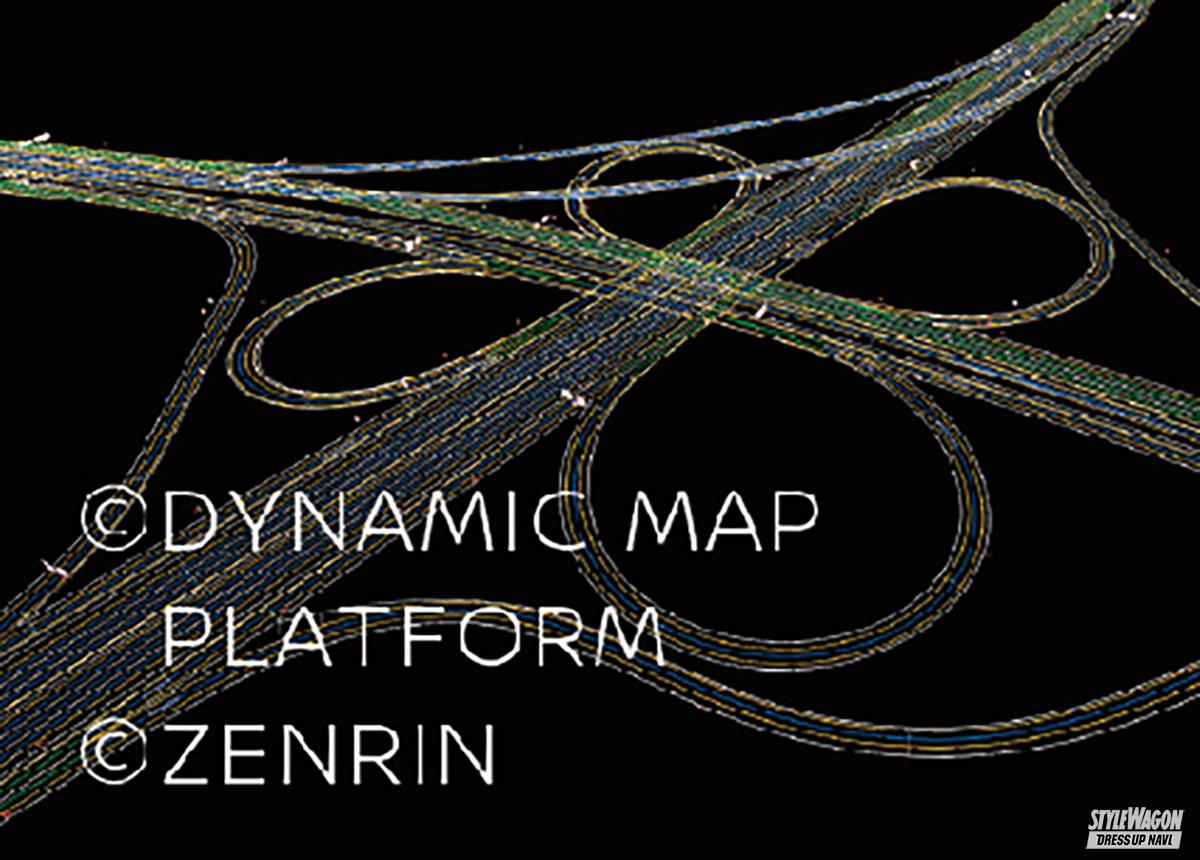
KEYWORD 08 ▶ ダイナミックマップ
高精度3次元地図のことです。ハンズフリーやハンズオフが可能なレベル2や、レベル3で使われています。自車周辺の状況を詳しいデータとして、クルマのシステムが事前に知っておく必要があるのです。3次元地図というと、最近のカーナビで周囲の建物が立体的に見えるものがありますが、あれは2次元地図を3次元風に演出したに過ぎません。高精度3次元地図とは、実際の測量車両が全国各地を走行して収集した道路の状態や周囲の建物などの「地物(ちぶつ)」の位置や形をデータとしてシステムに取り込み解析したものです。もちろん、道路周辺の環境は建物の立替えや道路改修などで変化することもあるので、定期的な実測が必要となるため、コストがかさみます。そのため、内閣府を中心にした国家プロジェクトとした自動運転プロジェクトの一環としてダイナミックマップを事業化したのです。海外の地図データとも連携して国際標準化の動きも徐々に進んでいます。
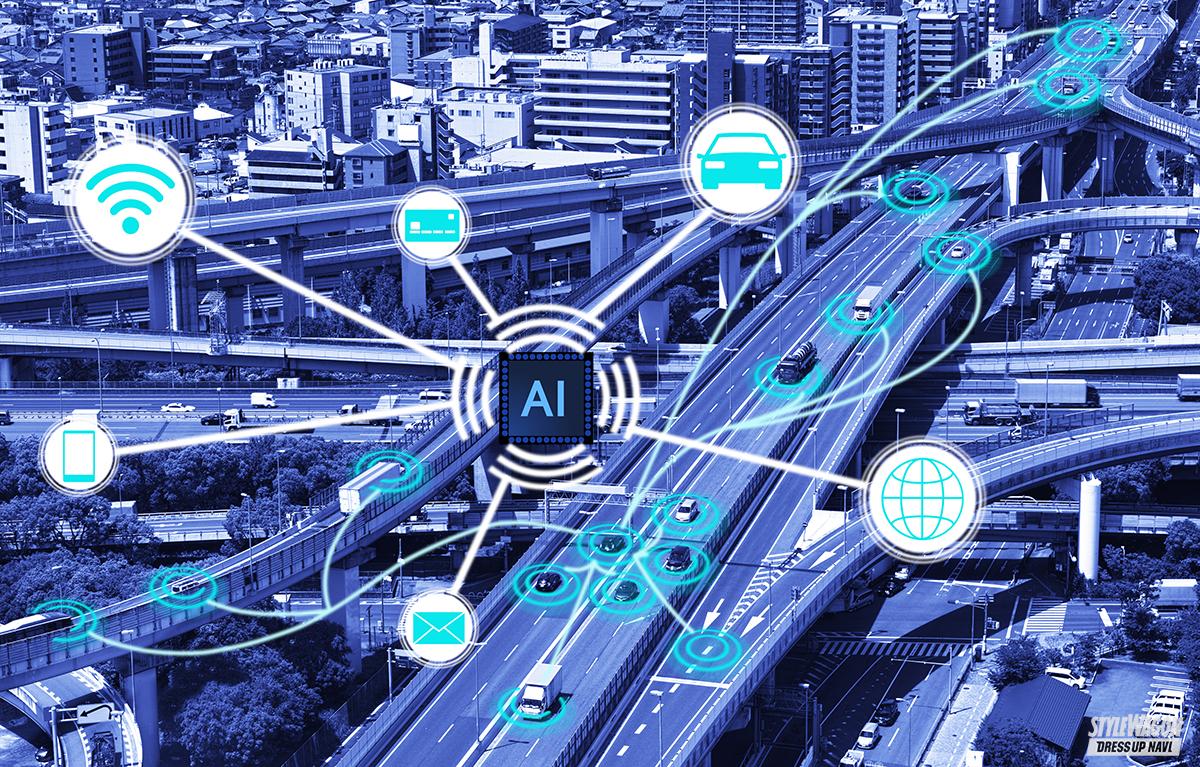
KEYWORD 09 ▶ V2X
Vとは、ヴィークル(クルマ)のこと。Xとは、さまざまな物体を指します。これらがつながること「to」を英数字で表現し、V2X(ブイ ツゥ エックス)と呼びます。要するに、クルマと外部が通信によってコネクテッドするシステムを意味します。V2Xは総称であり、車車間通信(V2V)、路車間通信(V2I:Iはインフラストラクチャー)、歩車間通信(V2P:Pは歩行者の指すペデストリアン)などに分類されます。ADAS(先進運転支援システム)や自動運転ではV2Xは極めて重要になります。なぜならば、自車センサーはあくまでも自車がデータを取ることであり、周囲のクルマ、自転車、歩行者、信号機などとの間で情報をやり取りしているわけではないからです。ただし、ここで大きな課題があります。現時点では、自動車メーカー同志がこうしたデータを共有する仕組みがなく、V2Vの方向性が定まっていないのです。今後、データのプラットフォームの標準化の動きが進むことが期待されます。
KEYWORD 10 ▶ トロッコ問題
倫理についての課題です。このトロッコとは、炭鉱などで使われる手押し車ではなく、路面電車をイメージしています。そんなトロッコ(路面電車)が何らかの原因で制御不能となった状態で走り続けたとします。その途中に切り換えポイントがあり、ひとつの方向には大勢の人がいて、もう一方の方向には少ない人数の人がいます。そこで、倫理上、ポイントをどちらに切り換えるべきかという命題です。人が自動車を運転する場合、トロッコ問題のような「2つのひとつ」という究極の選択を求められた場合、どう行動するかは運転者の責任になります。それが、システムが運転の主体となるレベル3やレベル4では、システムに対してどのようなプログラムを行うべきかが大きな課題です。究極の選択までは至らなくても、複雑な交通環境でシステムが適切に判断し続けることはかなり難しいと考えられています。そのためにも、走行の先読みができるような、通信によるV2Xが必要になるのです。
PROFILE 桃田健史
1962年8月、東京生まれ。日米を拠点に、世界自動車産業をメインに取材執筆活動を行う。インディカー、NASCARなどレーシングドライバーとしての経歴を活かし、レース番組の解説及び海外モーターショーなどのテレビ解説も務める。日本自動車ジャーナリスト協会会員
▷これからどうなる自動運転 まとめはこちら
[スタイルワゴン・ドレスアップナビ編集部]








