三菱重工、プラント巡回点検防爆ロボット「EX ROVR」第二世代機をENEOS大分製油所にて連続稼働達成




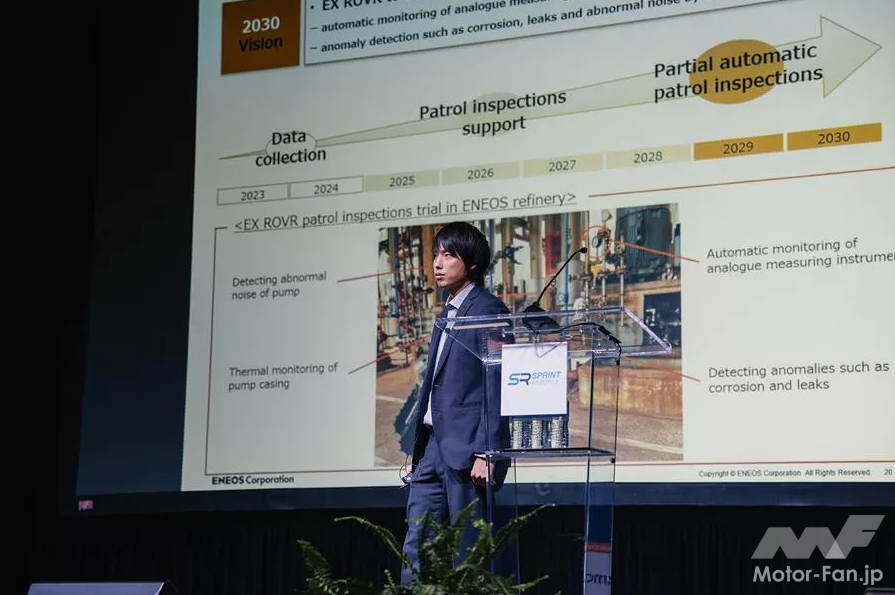

製油所内の防油堤などの段差や狭所、草地、砂利、水たまりや夜間を含めた多様な環境での走行試験を通じて高い走破性を確認するとともに、製油所での点検作業を代替した計器画像、熱画像、音声情報の取得に成功した。また、三菱重工は米国ヒューストンにて10月に開催された先進ロボットに関する国際会議である「SPRINT Robotics World Conference ※2」にEX ROVRを出展。同会議では、ENEOSとともに長期試用の成果や2030年までの運用ロードマップなどについて紹介、各国の事業者から問い合わせを得るなど、国内外からの高い評価を集めている。
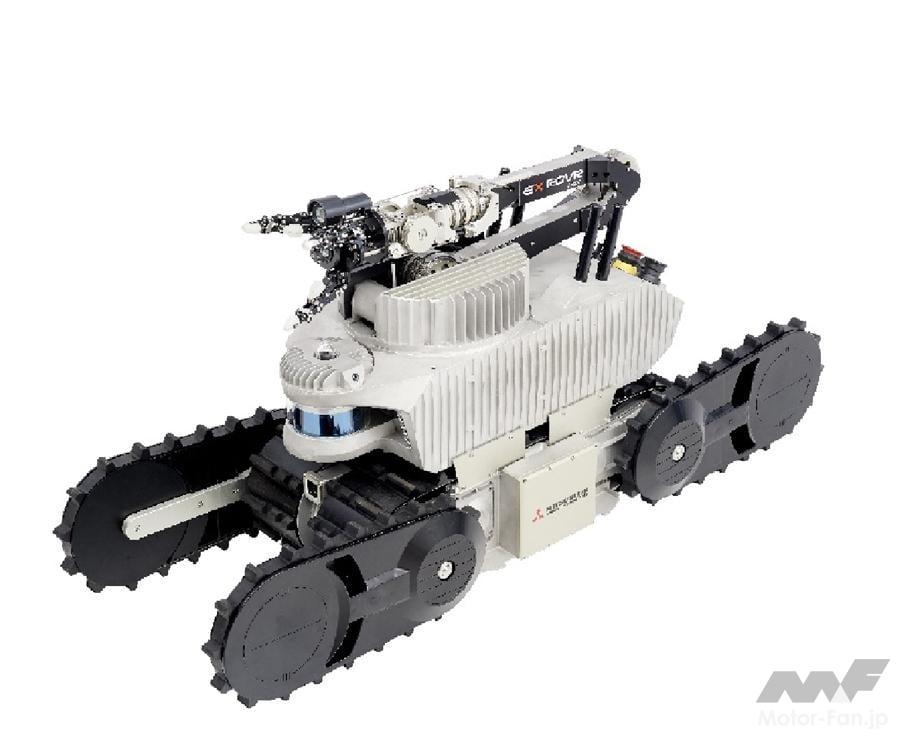
X ROVRは、爆発性雰囲気となり得る状況下において昼夜を問わず点検作業を行い、作業員の安全性向上、業務効率化および設備稼働率の向上に貢献するものであり、照明付きカメラを搭載した6自由度※3防爆マニピュレーターの採用により、プラント内計器の複雑な配置に応じたさまざまな姿勢で近接・正対画像を撮影できるほか、ガス濃度の測定や音声の録音、熱画像の取得も可能。さらに付属のウェブアプリと組み合わせて活用することで、遠く離れた場所からでも点検スケジュールの運用管理や点検データの確認を行えるほか、プラントにおけるインシデント発生時には遠隔操作によりタイムリーな現場確認が可能で、プラント点検業務の効率化と安全かつ迅速な事態収束に貢献する。
また、EX ROVRはユーザーインターフェースを考慮した設計で操作も容易であることから、ENEOS大分製油所の運転員が短期間で操作方法を習得し、稼働中の実プラントでの遠隔操作、走行ルートや点検動作の設定、自動走行を実施することを実現している。
三菱重工(左)およびENEOS(右)のプレゼンテーション
【注釈】
※1 防爆性能:引火性ガスが充満する環境下において、機器自体が発する電気火花や熱などによる爆発や火災の危険性を抑える性能を指す。
※2 SPRINT Robotics World Conference:石油メジャーをはじめ、プラントメンテナンス用ロボット、装置メーカーなどが参加し、世界各国から最先端の検査用ロボットが集う国際会議。
※3 6自由度:動きの自由度を指しており、本ロボットのマニピュレーターの先端は上下、左右、前後に動くことができ、前後に傾く、左右に首を振る、左右に傾斜する回転運動も可能。






