「クルマの未来、自動運転の現在」 小口泰平×清水和夫特別対談















連載
シン自動車性能論日本での自動運転の研究は1961年から
対談は2024年5月27日、都内にある小口泰平先生の書斎で行なわれた。聞き手(MF)は、鈴木修己(株式会社三栄相談役)/鈴木慎一(モーターファン編集局長)が務めた。

小口泰平 (おぐち やすへい)
1937年長野県生まれ。工学博士。芝浦工業大学名誉学長、日本自動車殿堂名誉会長。1959年芝浦工業大学工学部機械工学科卒業、東京大学生産技術研究所を経て、1968年芝浦工業大学助教授、1982年に教授、1991年システム工学部長を経て1997年から2000年まで学長を務めた。マン・マシンシステムの立場から自動車の運動性能の試験研究、安全運転に関する研究に携わってきた。
清水和夫 (しみずかずお)
1954年生まれ東京出身/武蔵工業大学電子通信工学科卒業。1972年のラリーデビュー以来、N1耐久や全日本ツーリングカー選手権、ル・マン、スパ24時間など国内外のレースに参戦する一方、国際自動車ジャーナリストとして活動。自動車の運動理論・安全技術・環境技術などを中心に多方面のメディアで執筆し、TV番組のコメンテーターやシンポジウムのモデレーターとして多数の出演経験を持つ。自身のYouTubeチャンネル「StartYourEnginesX」では試乗他、様々な発信をしている。2024年も引き続き全日本ラリー選手権JN-6クラスに「SYE YARIS HEV」にて参戦。
MF:今日は、Motor-Fan.jpで『シン自動車性能論』の新連載を始めるにあたって、小口泰平先生(芝浦工大名誉学長)と国際自動車ジャーナリストの清水和夫さんに、「自動運転」をテーマに対談していただきます。おふたり、よろしくお願いいたします。
小口泰平名誉学長(以下小口):それでは、結構自由に喋っていいですか。この対談、愉快にやりますか。それとも堅くやりますか。
MF:愉快にやりましょう。小口先生は、自動運転の開発の最初期に、現場にいらっしゃったので、その辺りのお話から始めていただきたいです。私もおそらくは読者も、自動運転の開発が1960年代から始まっていたことすら知りません。それから専門家おふたりから見て、自動運転が実現する日が本当に来るのかというのは、一般ユーザーとしては興味があるところです。
小口:すぐそこまで来ていると思いますが、地域によって、道路環境が異なりますので大変かと思います。ニーズは加速度的に早まると思います。近頃は、タクシーをお願いすることが日常化しておりますので、せめて三途の川の彼の地からお呼びがかかる前に自動運転のお世話になりたいですネ。(笑)
MF:今日はその自動運転についてお話ししていただきたいと思っています。多くの人が「クルマに乗り込りこんで、”何丁目何番地まで”と言ったら、あとは何もせずに目的地に着く」これが自動運転の完成形だと思っています。自動運転技術が、本当にそこまで進むのでしょうか? 先日、小口先生は自動運転の研究は当初、交通事故を減らすために強く関心を持たれたとおっしゃいました。そのような話も含めておふたりでお話していただけませんか。
清水和夫(以下清水):自動運転が日本で注目されたのはたしか2013年に日本で開催された第20回ITS国際会議でした。でも1950~60年ごろからアメリカではGMが研究をスタートさせていました。
小口:日本では1961年の秋頃、今から63年も前のことですが、当時の通産省工業技術院・機械試験所で自動操縦の研究がスタート。当時は、「自動運転」とは言わずに「自動操縦」と言っていましたが、同じものです。私は要請を受けて、自動操縦の車両運動力学とそのシミュレーション、模型実験による理論解析、そして走行実験はオブザーバーとしてのお手伝いでした。実験車は、プリンス自動車(後に日産に合流)のスカイライン・バン型でして、走行実験は機械試験所の東村山テストコースでした。車両移動の折、こっそりと助手席に乗りコースを移動中、突然強い風にあおられて新聞紙が前方の路面に、すると自動の緊急ブレーキが作動し、実験車は横滑りにより横転寸前、肝を潰しました。でも見事な自動運転の反応には敬意を表した次第です。
清水:それはお見事でしたね。自動操縦システムが新聞紙を障害物と受け止めて。
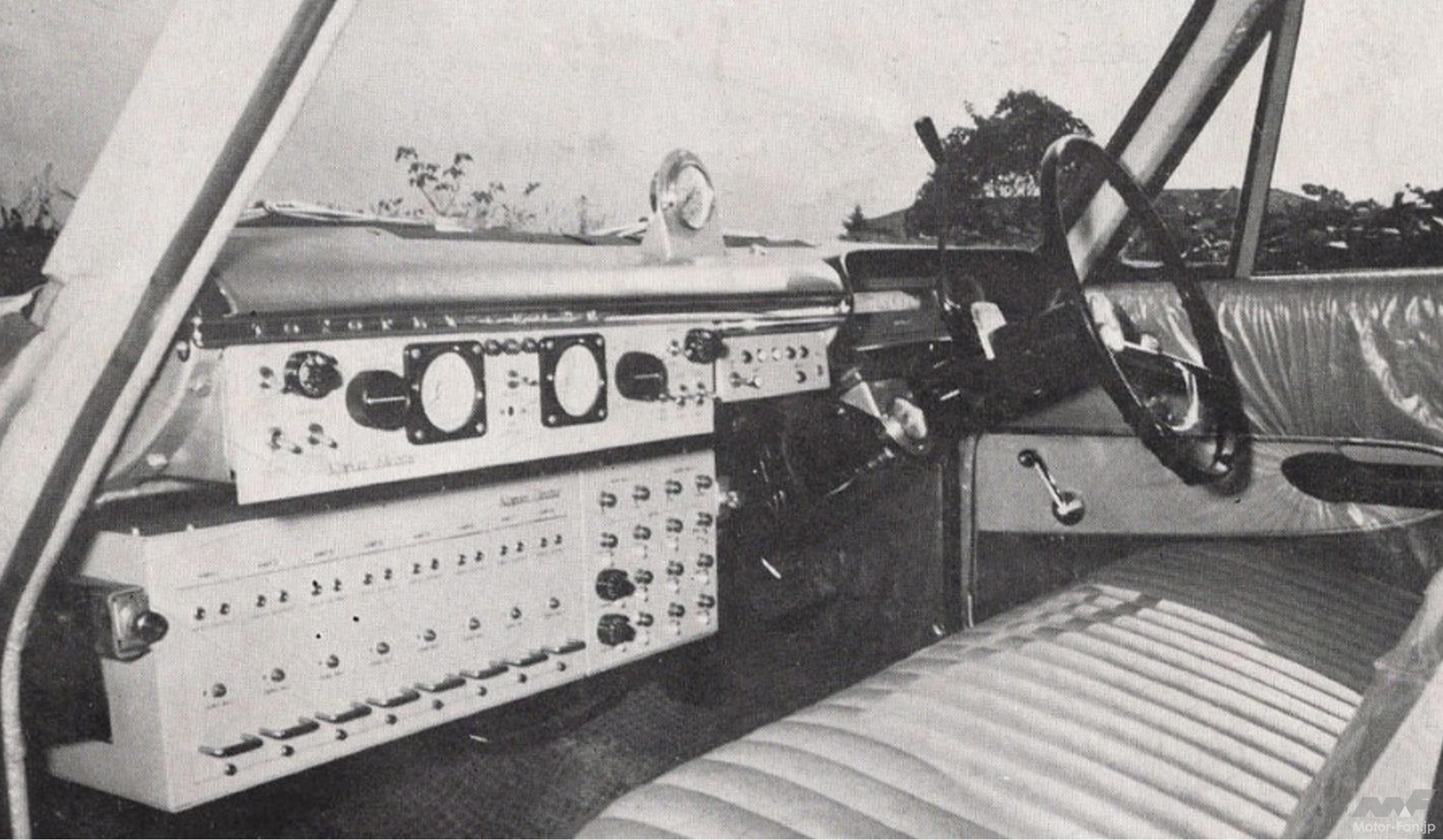
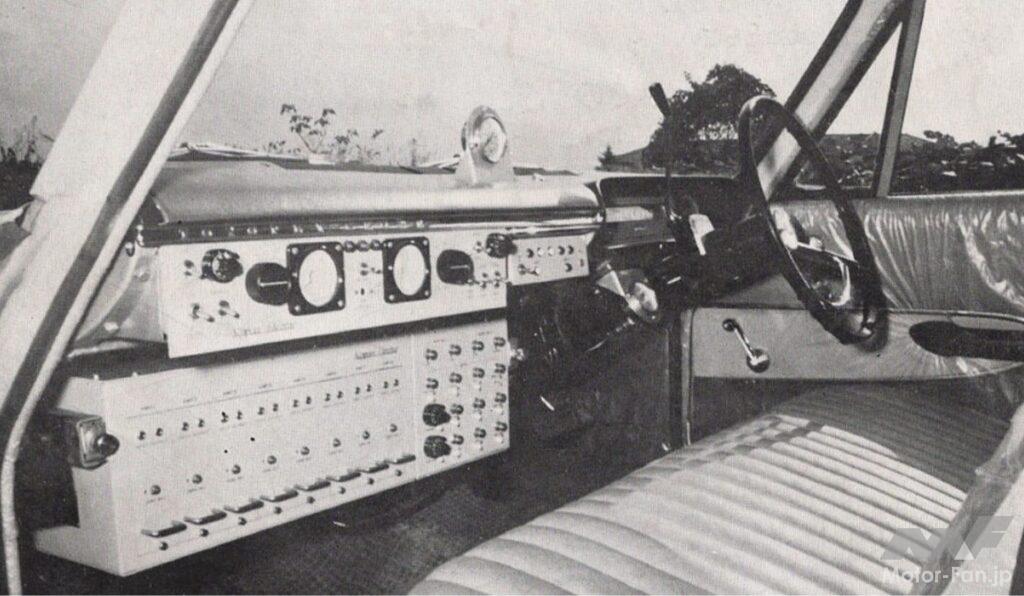
小口:ここにその実験車の前席の写真<図1>を示します。前席の各種のメーター類、各種の操作類などが所狭しの感で、乗員のスペースは、シートをギリギリまで前に寄せていますので、ドライバー席と助手席は、まさにギュウギュウ詰め。後席とその後ろの荷物室は演算用の計算機で隙間なしの状態でした。かくしてさまざまな基礎研究を経て、この自動操縦実験がまとめられ、最終段階では、実用実験が名古屋での市バスによって行なわれました。余談ですがその時、バスの乗り降りをしやすくするための「乗降時の車体低床化」の装備を体験、今日では一般的ですが、感動したことも思い出しました。
小口:ところで、私は最初、自動運転は「その快適さ・楽しさ」から研究するのがいいなと思っていたんです。しかし、1961年、今から64年も前になりますが、東大生産技術研究所で自動車の運動性能の研究を始めて、しばらくしてからのことでした。安全のための研究をやるべきだと強く思うようになったのです。それは当時、平尾先生(平尾収東京大学名誉教授 1915-1995。2001年自動車工学の基礎と体系を確立した功績で自動車殿堂入り)のお付きとして、警察庁交通部の委員会に出かけた折のことです。その時に、交通事故の悲惨さ、1年間にいかに多くの方々が交通事故で亡くなっているかを知ったのです。それはショックでした。当時、年間の交通事故死者数は1万8000人くらいでした。ところが、この統計数値は、事故発生後24時間でまとめていますから、例えば事故後、1~2週間ほど伸ばしての統計数値にしますと、その事故死者数はさらに2割近く増えるんです。大変な数の方々が交通事故で亡くなるわけです。そのことを知って、クルマは罪深い、何とかしなければと。当時、自動車の運動性能「操縦性や安定性」に興味を持っていましたので、やがてはこれらを含めて自動操縦につなげるべきと考えていました。自動操縦のためにはどのようなシステム設計を、そのためにはどんな理論解析を行なうべきか等にも、関心を持った次第です。
当初は人の運転制御の解明を重視
MF:安全の研究から自動運転へ、具体的にどう繋がるのですか?
小口:当初は、ドライバーの運転制御をコンピュータに代替させるため、ドライバーの制御内容を解明して、運転プログラムを作成し、自動化することでした。少々ややこしくなりますが、人の運転は反応時間(むだ時間)を含む「比例の制御」、「積分の制御」、そして「微分の制御」によって成り立っています。この3つの制御は、どなたも行なっています。比例制御は非常に簡単でして、例えば2倍の距離を走るのには2倍の時間、3倍ならば3倍の時間をかけます。人間は位置を決めたり止まったりする時もこの比例計算を常時行なっています、無意識のうちに。ところが、比例の計算はほんの安全運転の一部であって、積分の計算が結構多く、しかも難しいんです。例えば、位置を決めてクルマを止めるときのハンドルを切る操作、車間距離をとるときのアクセル操作、横風を受けたときの進路を修正する操作などです。ところがさらに難しいのが微分制御です。これは高度な予測とそのタイミングをとる操作です。例えば、前のクルマを追い越す時、前車のスピードを判断して、どのくらい加速すれば、対向車が来る前に追い越すことができるか、全部計算しています。
MF:なるほど、ドライバーは高度な計算機でもあるんですね。
小口:これらの運転制御はどなたも行なっているんですよ。ところが、高齢になると、比例制御は簡単にできても、積分制御が面倒になり、特に微分制御の能力が急速に劣ってきます。自分ではできると思っていても、タイミングがずれてしまったり、時には間違えたり。この兆候が多少とも見えてきたときが、免許返納の時だと思っていただきたいですね。実はね、私、最近、免許を返納しました(84歳の時)。この微分制御も確とできたのですが、安全を研究してきた者が、たとえ万が一であっても絶対に事故を起こしてはならないことを考慮して……。何とも寂しいです、免許返納は辛いですよね(笑[泰小1] )。
MF:今先生がおっしゃったことで言うと、微分も積分も歳を取るとずれるんですか。
小口:そうです間違いなく能力が落ちてきます。清水さん、恐縮ですが今おいくつですか。
清水:70歳です。70歳で、この前全日本ラリーで優勝しました。
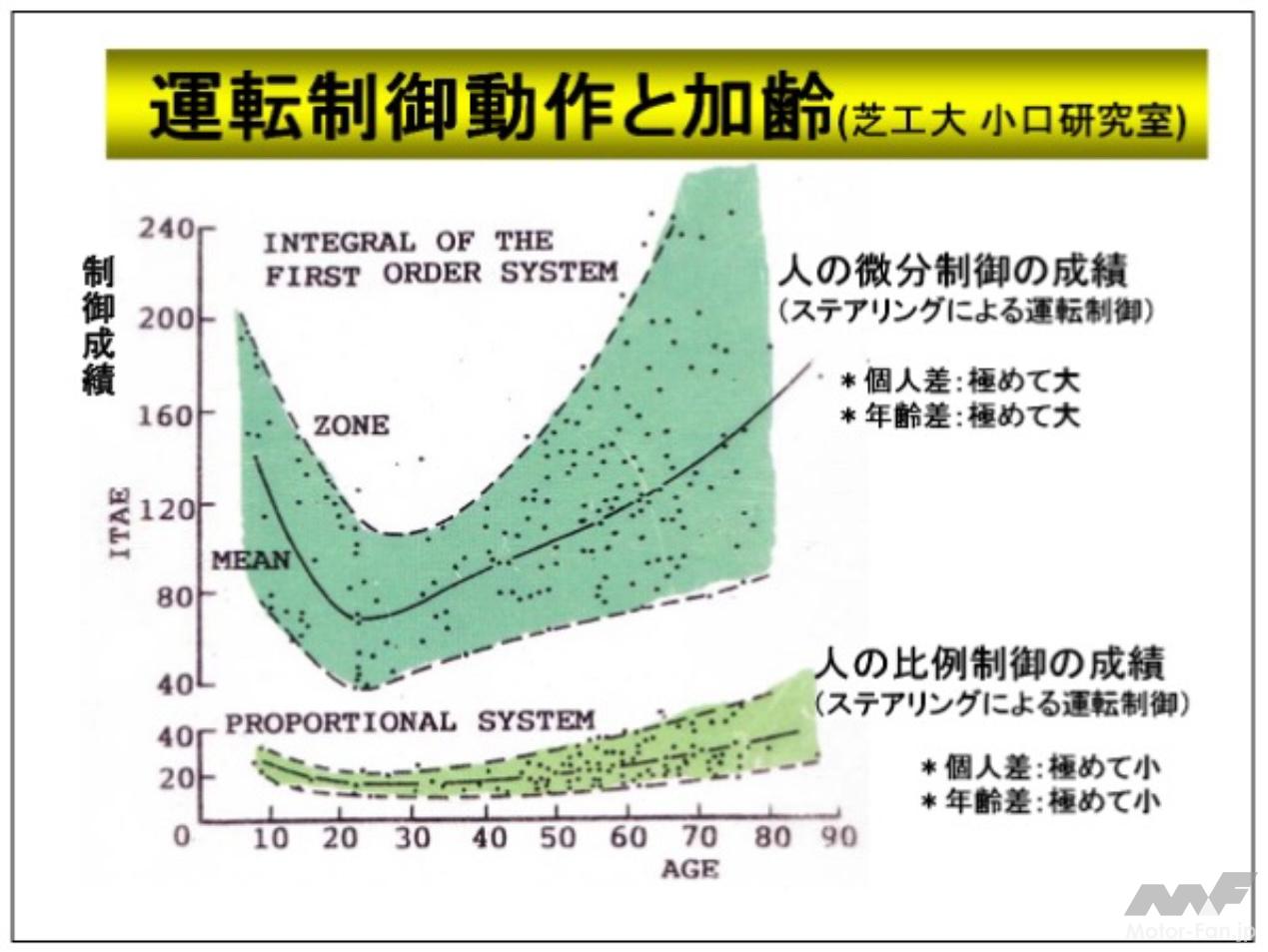
小口:それは素晴らしい。ラリーは高度な微分制御の塊ですから。まったく衰える気配はないんですね、一般的には80歳頃から注意しないと。70歳ならまだ大丈夫です(笑)。人によりますけどね。実はかつて「微分制御」について年齢別に調査研究を行なったことがあります。膨大な実験になりました。お示しいたしましょう。<図2>。

小口:まず、制御が容易な比例制御は、図の下辺に示すように個人差が少なく、年齢差もわずかです。黒い点がひとりひとりの値で、横軸は年齢です。微分制御はV字型を示し、年齢差、個人差は大でして、加齢により大きく衰えてゆきます。25歳くらいが最も優れていますが、年を重ねると激しく劣ってきます。
清水:個人差は大きいですね。ポール・フレール先生は90歳くらいでクルマに乗っていましたものね。
小口:人によりますけど一般的には、90歳はちょっと難しいかもしれませんですね。
マスキー上院議員とラルフ・ネーダー氏
MF:さて、通産省(現経産省)の自動操縦の研究の発足は1961年の秋、実質的には1962年からでしたね。欧州やアメリカなどの国々はどうだったんでしょうか。
小口:そうそう。当時は「自動操縦機構の研究」というテーマでした。私はドイツや、その他のヨーロッパでも、その頃見かけたことはないですね。安全の研究、特に交通安全の研究や事故分析の研究は、当時イギリスとオランダが最も進んでいましたが、自動運転の研究は見当たりませんでした。ドイツのプロフェッサーに「どうしてドイツは自動操縦の研究をやらないの?」って聞きましたら、これがまた愉快。「君ね、クルマってのは人が運転するものなんだよ。なんでそんな機械にやらせる? なんでコンピュータを使ってやるんだ」って。クルマは人が運転するものと言って、ガンとして受け入れなかった。そのくらいドイツは関心が薄かったです。ですから、日本で通産省が行なったのは、見事だと思いますね。「先見の明あり」です。
清水:その頃の背景を申し上げますと、私も1997年にNHK出版で『クルマ安全学のすすめ』という本を出して、あと、神奈川工科大で運動性能の客員教授をする前は、東海大学で欧州自動車技術史を講師として教えていました。その時に、やっぱり安全をテーマにしたいと思ったのです。戦後のモータリゼーションの発展は目を見張る勢いでしたが、交通事故死者数も激増していました。そこに消費者活動家のラルフ・ネーダー氏が出てきたんです。ネーダー氏はGMのクルマの危険性を訴えて大論争になりました。GMはネーダー氏のゴシップまで探すほどの論戦となりましたが、最終的には政府の公聴会で決着がつきました。連邦政府は1966年にFMVSS(フェデラル・モータービークル・セフティ・スタンダード)という安全基準が制定され、ネーダー氏の書いた『アンセーフ・アット・エニイ・スピード(UNSAFE AT ANY SPEED)』(いかなるスピードでもクルマは危ない)が、政府を動かしたのです。
小口:なるほどね。インパクトがありましたね。
清水:トリガーはラルフ・ネーダーでしたね。ラルフ・ネーダーの一件が、50年代後半から60年代にアメリカの政府と世論を動かして、アメリカのNHTSA(National Highway Traffic Safety Administration=米国家道路交通安全局)が、基準作りに動いた。NCAP(ニューカーアセスメント・プログラム)ができたのはその当時なんですね。
小口:そう、このNHTSAは見事でした。当時、本格的な安全体制の世界の総本山でしたから。ラルフ・ネーダー氏の安全なクルマの追求は過激すぎましたが、結果として貢献も大でしたね。ネーダー氏は、大統領選にも毎回出馬していましたよね。あの本気度は凄い。
清水:マスキー法のマスキー上院議員とラルフ・ネーダー氏は、世界の自動車を変えましたね。
小口:確かに、おふたりのその姿勢と成果はお見事でした。
清水:それを受けてボルボが3点式シートベルトを考案。それをパテントで縛らないで全世界のOEMに提供しました。メルセデスは設計者のベラ・バレニー氏が、クランプルボディで衝突安全ボディを考案し、そこから一気に技術競争が始まっているのです。
小口:クルマの安全は、万が一に備えることが重要でして、クラッシャブルボディは従来の発想では考えられなかった発想でしたね。
清水:そうですね。
小口:私は、衝突実験に参画したときは感動しました。以前は、クルマは潰れちゃいけない、できるだけ頑丈に作るべきだと思っていたのです。ところが、それは大変危険なんですね。乗員の空間は頑丈に潰れないように、エンジンルームやトランクルームは潰れやすくして衝突エネルギーを吸収させる、この技術はお見事です。
清水:ベラ・バレニー氏は、ダイムラーの安全の父と言われた人です。で、やっぱりボルボの3点式シートベルトの考案も大きかったですね。
乗員を守るエアバックの発明は日本発
小口:安全に関わる大きなコトのひとつにエアバックがありました。発明家の小堀保三郎さんが1965年にエアバックを発明し、1966年に、イギリスで特許を取得、その改良型は1971年に。西ドイツでも1966年に。ベルギーは1966年と1971年に。オーストラリアは1966年。そしてフランス、スイス、デンマーク、カナダ、オーストリア、スウェーデン、オランダそして日本など、文字通り世界のパテントを取得しています。実は小堀さんから頼まれて、これらの特許証書は私が預かっているんです。これです。当時の世界特許です。ところが、これらがまったく生かされずに時が流れてしまいました。パテントが切れる20年後近くにアメリカとドイツからエアバッグが生産されたんですね。日本は運輸省が横を向いたまま、メーカーも横を向いていました。誠に残念でした。どうぞこれをご覧ください。


MF&清水:あ、ほんとだ。世界特許だね。凄い!
小口:これイギリス、デンマーク、アメリカ……この世界の特許取得や実験の様子は、当時のNHKで報道されていました。当時の懐かしい思い出ですが、恩師の平尾先生から、「ボランティアで小堀さんを手伝いな。そう、小堀さんは計算があまり得意じゃないから」と言われて。麻布・伊良子坂のオフィス(GIC:グッド・アイデア・センター)で数年間、大学の仕事を終えた夜8時頃から12時ころまで、完全ボランティアです(笑)。
MF:小堀保三郎さんは発明家、元株式会社G.I.C代表取締役(1899-1975)でしたね。1964年に独創的なアイデアの元、エアバッグの開発に着手。技術的裏付けを得るために東京大学の生産技術研究所をはじめとして国公私大の教授陣に。実験は立川の防衛庁航空医学実験隊の支援体制が大きかったようです。
小口:おっしゃる通りでして、加えてNHKのニュース報道や特集に取り上げられ、注目されましたね。開発資金には私材を投じられ、エアバッグ関連の特許は何と世界14カ国に及んでいました。20年後の特許が切れる頃に、アメリカとドイツから実車に搭載。当時、小堀さんにそのことをお伝えし「如何いたしますか」と尋ねますと「役に立ってくれればそれでいいよ」とおおらかでした。このエアバックは世界の全車両への広がりによって、大勢の方々が救われていますので、小堀さんは天国で奥様とニッコリしていることでしょう。ご参考までに、これらについての図3を示します。

MF:特許は、こういうものなんですね(手に取って)。初めて見ました。自動運転に係る安全性の追求により、さまざまな研究・開発が行なわれてきたことがよくわかりました。
ニューヨーク万博のフューチャーラマの効果


MF:さて話題をかえて、自動運転の開発は、どのような経緯をもって今日につながってきているのでしょうか。
清水:先ほどの話で、50年代にアメリカで一気にモータリゼーションが盛り上がった時に、全米のフリーウェイを電磁誘導・ドライバーレスで走る。長距離ドライブは、家族はクルマの中でトランプをやりながら運転しないで済む。GMにはレベル4の自動運転転の構想があったみたいだね。
MF:一緒に自動運転のムック(MFi特別編集『自動運転のすべて』を作った時に出てきましたよね。
清水:そうそう、あれが1950年代なんです。だからその時は一気にモータリゼーションで長距離ドライブをするようになったから、ハンドル握っていると眠くなっちゃう、だから自動運転なんです。LiDARとかなかったんで、電磁誘導でやろうっていう動きがありました。もうひとつ大事なのは、戦前の1938年のニューヨーク万博のフューチャーラマです。


小口:大事なお話ですね。1938年のこと、もう少し詳しくお願いします。
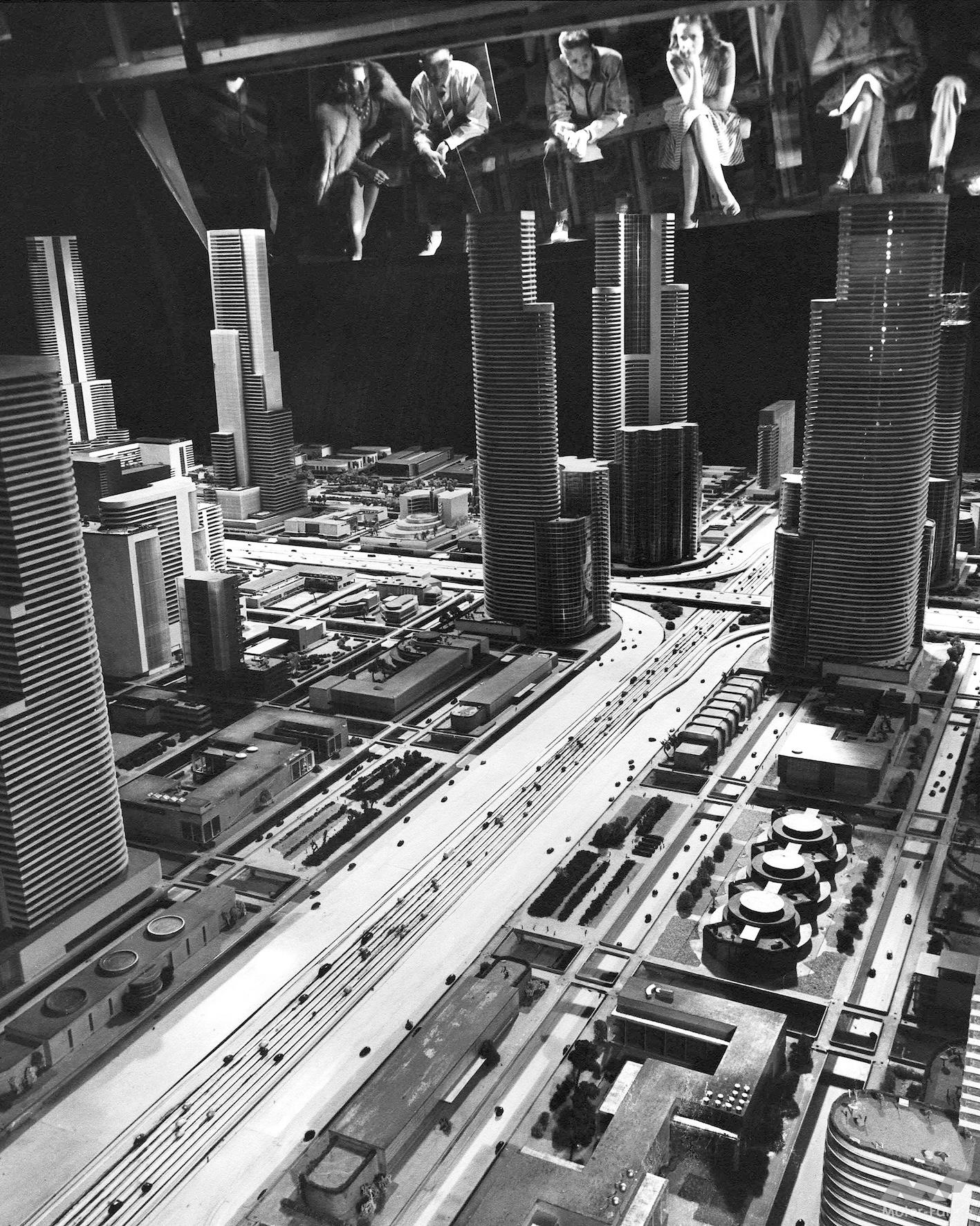
清水:ニューヨーク万博で、GMが自らのパビリオンの中に、フューチャーラマという名前でジオラマを作ったのです。都市高速とこれからの町は、町の中心部をモビリティ高速道路が入ってきて、生活者は郊外で、お父さんは町で。モビリティのイメージを見せたのです。それはね、都心の真ん中のビルの中に高速道路走るってのはね、今の東京の首都高速だよね。それがね、自らジオラマを作って、パビリオンの上に人々を呼んで、みんな見て上から、将来はこういう町になるんだよねっていうのを、もうGMはやっていたんですね。それより20年くらい前の1925年に、ル・コルビュジエが、景観が大切なパリの街の都市計画、ヴォアザン計画を発表した。都市計画はヨーロッパがかなり進んでいますね。
小口:そうだったんですか。いいお話ですね。

清水:1930年代のGMって、まだベンチャー企業だったですよね。クルマを作るだけじゃなくて、全米の街作りまで考えていました。
MF:アメリカは都市計画とインフラと自動運転みたいなのをセットで考えていて、ドイツは「クルマは自分で運転するもの」で、自動運転するものじゃないっていう考えだったんですか。
清水:ヨーロッパは中世の時代からの道を使っているから、道路の形状が複雑で混在交通だったんだけど、アメリカは誰もいないところにフリーウェイを作っているから、直線で意外と自動で走りやすい。地政学的な違いもあったと思うんですね。もうひとつは、軍事技術の転換です。平和な時代に軍事技術がモビリティに移管されることはアメリカでは当然でした。LiDARやGPSの地図もそうですし、もう全部軍事由来。だから、DARPA(米国防総省・国防高等研究計画局=Defense Advanced Research Projects Agency)は最初に2004年、2005年にDARPAチャレンジっていうのをやって、賞金を出しました。アメリカのスタンフォード大学やカーネギーメロン大学の産学共同で、まずはモハーヴェ砂漠で自動運転車のレースをやって、勝つと賞金100万ドルなんですね。で、その時の若い学生たちが大体今のGoogleとかのトップです。
小口:それは興味深いお話です。

清水:フォルクスワーゲンとスタンフォード、GMとカーネギーメロンで戦って、次は街中のアーバンチャレンジ(2007年)がありました。そこにトヨタと日産と、ホンダは入っていかなかったんですね。それはなんですかって聞いたら、やっぱりDARPAってアメリカの防衛・軍事の研究所のお金だから……。
小口:なるほど、やっぱり軍事技術と一緒に歩むと早く進むんですね。
清水:だって、原子力潜水艦は試作、作らないじゃない? だから、ほとんど3Dで全部デジタルエンジニアリングですよね。自動運転の技術は軍事技術で、今度ドローンで無人兵器とかそっちの使い方をすればね。日本は学術会があって、学術会の先生たちはそういう軍事技術に加担しないっていう、頑固な想いがあるから。
小口:そうですね。なるほどね。そうか。
清水:いろんな断片的な話が今日、先生の話で繋がっていくと実感しました。当時アメリカは何を考えていたのかとか、ヨーロッパはまたアメリカとは違ったことを考えていた。そういうのは面白いですよね。日本とヨーロッパとアメリカの、そこにアカデミアと産業界と行政、産官業の関係がどうなっていたのかとか。
ESV京都会議(1973年・第4回・ESV国際会議)議定書採択
清水:小口先生、記憶にあると思いますけど、アメリカのESV(エクスペリメンタルセーフティビークル)はネーダー氏の件があったので、アメリカ政府も本気になりましたね。たしか1973年に京都でESV国際会議が初めて開催、自動運転という未来技術も登場したと聞いています。これを受けて自動車メーカーが1980年代にエアバックとかABSが出てきたと思うんですね。
小口:私も、1997年12月に開催された通称「京都会議」に出席し、感動しました。あの有名な京都議定書が採択されたときのことです。その時の審議が今でも懐かしく思い出されます。環境問題は国際間のギャップが如何に大きいかを痛感した次第です。
MF:1960年代と70年代初頭っていうのは、いわゆるセンサーというのは何があったんですか。
清水:カメラが主流でした。エレクトロニクスがまだそんなに入ってきてないから、さっきの先生の話で言うと、カメラで見た新聞が、新聞か危ないものなのかっていうのは、ソフトウェアで区別がつかない。カメラはいいんだけど、見たデータがまだデジタルデータになっていなかったと思うんですよ。
小口:センサーは、カメラ、そして車両の位置の確認とコースや障害物を指示するための磁気装置もありましたね。路側にケーブルを設置し、車両の位置、速度、加速度などの情報を受け止め、判断してブレーキ、アクセル、ハンドルなどの操作を指示する。当時はこのソフトウェアの中身は今日に比べるとまだお粗末だったんですね。でも、当時としては最先端のシステムであり、先進の技術でした。時代の流れは、過ぎてみると速いです。
MF:そうですか、クルマに初期のコンピューターが山積みされている状態で行なっていたんですか?
小口:はい。その通りです。現在のパソコンの計算能力の足元にも及びませんでしたから。当時は、車載できない大型コンピューターをもってしても演算能力は不足でしたね。
清水:当時はまだ真空管だから、半導体もないし、トランジスタでもないんです。
MF:最初のときの話に戻りますが、通産省の自動操縦実験の時、強風によって飛んできた新聞を障害物と認識し、急ブレーキが作動。これはカメラが捉えて計算したんですか。
小口:そうですね。激しい急制動と左右輪のタイヤのコーナリングフォースが限界を超えて、車体の横滑りが激しくなり横転寸前の状態になったのです。確か、その当時、もう少し高度な計算が行える大型コンピューターは、東大と三菱にあったように記憶しています。これ等は演算能力はけた違いに大きいのですが、巨大きすぎて車載はまったくできませんですね。私どもはその頃、研究内容の高度化と高速化を図るために、東大の最新のコンピューターを使っていましたがパンチテープを使っての演算でした。今、思い返しますと大変な作業でした。
清水:テープに穴を開けるんですよ、パンチングをして。
小口:今日では、どなたも高度な演算をノートパソコンで簡単に行なっていますが、その当時は大変でした。余談になりますが私の学生時代は、手回しのタイガー計算機や計算尺を使って、卒業設計に取り組んでいました。今とは雲泥の差でしたね。
清水:僕は、電子工学専攻だったので、コンピューターのプログラムは紙テープでパンチング。その1個の穴がずれると、違うプログラムになっちゃう。テープが切れたりするんですが、気が遠くなります。処理能力はすごく遅いから、時間が膨大にかかる。多分なんかあったらクルマを止めろみたいなアルゴリズムだったんでしょうね。見たら止めろみたいな。今はディープランニング(深層学習)で、これが新聞紙なのか固いものなのかはちゃんとわかるようになってきています。自動操縦の世界は半導体の進化が大きいですよね。そうでないとLiDARなんて行き着けないですからね。
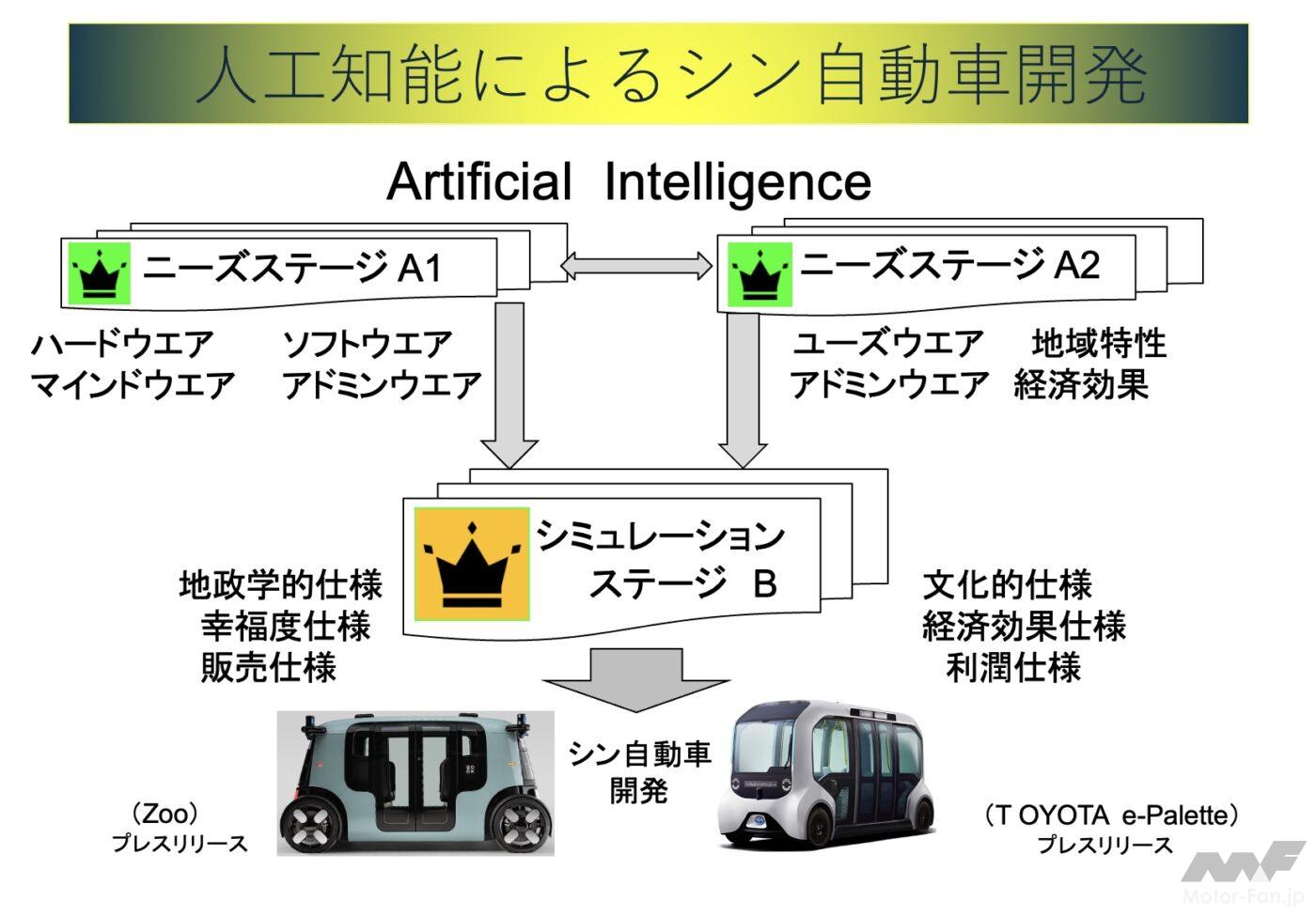
小口:そうですね。私がお話するよりも清水さんに話していただいた方がいいと思いますが、例えば、2012年には深層学習や画像認識などの開発が行なわれて、急速に進化するんですね。2016年にはアメリカのGoogleが自動運転システムを開発、Waymoが無人運転タクシーに着手する。それから、2018年にはフェニックスのEVが動き始めて、2019年にはLiDARが。この辺から本格的に高度になってきて、私はこれらの技術的内容の理解に苦心惨憺の状態でした。
日本に必要なのはスピード感、だたし真面目だから制度はいい
MF:その自動運転の初期の開発の頃っていうのは、いわゆるトロッコ問題みたいな話はあまりなかったんですか。
清水:倫理問題ね。法律家はそれが好きなんだけど、実際に自動車メーカーにトロッコ問題をどう解決するかプログラムを作るなんて、できないですよね。今でもできない。やらない・できない。だから、ドイツみたいに哲学のある国は考え方としては「ひとりだろうが5人だろうが命は平等」と言うものの、現実的ではないですよね。アメリカは功利主義があるので、結果的に税収がある方を選べばと罪に問わないみたいです。日本は今ようやく倫理問題を議論するようになりました。しかし、生々しいのはね、バスですね。路線バスは乗客が立っているので、運行上は0.3Gくらいの制動力が規定されているので、自動運転のソフトウェアも0.3Gにする。それ以上だとみんなひっくり返っちゃうから。しかしバスの運転手さんは、もし子供が飛び出してきたら、多分急ブレーキを踏みますよね。すると、0.5Gぐらい出ます。結果的に乗客がひっくり返ってバスの中で倒れても歩行者を救う。だから、乗客の安全性を優先するのか、目の前に出てきた子供を優先するのかという倫理問題は現実的な例です。
小口:そうそう。そりゃあそうですよ。
清水:ところが、自動操縦はプログラムで0.3Gしか踏まないって決めている。だったらヒューマンドライバー、自然人の方が安全じゃないかってなっちゃって。だからどうすんの、だから路線バスの急ブレーキをどうすんのっていうのは、今倫理委員会で議論しています。
MF:答が出なさそうな問題ですね。
清水:結果的に運転手さんは、人間の場合は多分急ブレーキで歩行者の子供を助けた。でも後ろでひっくり返った人がいて、頭を打ってもし亡くなったら過失責任問うかって法律の先生に聞くと、それは予期せぬことだから、過失責任は問えない。民事で解決してねとかね、そんな話ですよ。でも問題なのは、自動走行バスのプログラムを0.3Gだけにしとけばいいのか。オプションで0.5Gも入れといて、歩行者の場合は0.5Gかけるとかね。
小口:おっしゃる通り重要な視点ですね。国によって異なる体制、それに文化的な視点に大きな違いがありますので、中国の「ビル建設・マンション問題」のように何がなんでもの展開は如何なものかと。
清水:今でも憶えていますけど、東日本大震災があった2011年の東京モーターショーの前に自動運転のシンポジウムがありました。その時に私、モデレーターやっていて、GoogleとGMが来たんですよ。Googleはもうすでにプリウスを使って自動運転できるっていうデモもやっていたんですね。彼らに、この取り組みは社会課題解決のためかって聞いたら、いや、これはもうベンチャーなんで、資本主義の論理。だから1兆円ぐらい突っ込んで、それを後で売れば、企業の株価が上がってくんですよね。彼らは資本主義の論理でやっている。Googleクルーズもそうですよね。もう時価総額何兆円じゃないですか。だからアメリカのGoogleとクルーズは金儲けのためにやっている、と。日本はね、くそ真面目に社会課題解決なんですよ。予算はもう1兆円どころか200億円程度。SIP(戦略的イノベーションプログラム)をやっている時は年間30億円ほどでした。だから、ホンダとか日産、トヨタはもうそんなもんいらないよってなります。一度政府のお金使うと報告しなきゃいけないから、実は日本のOEMはもう面倒くさくてしょうがない。日本は大義を持って結構くそ真面目にやっているんですね。中国もアメリカと一緒で、やっぱりベンチャーなんです。だからポニーai.とかWeRideってすごいんです。しかし、それをどこかでビジネスにしていく。社会課題をちゃんと真面目に考えているのはどう見ても日本くらいだな。だからちょっと匍匐前進なんですけど。
小口:そうね、今のお話はすごく大事ですね。
清水:だから日本は制度がしっかりしているんですね。
小口:私は大賛成です。
清水:そう思います。最初はこれがあるから、スピードが遅くて亀みたいだなと思っていたんですけど、でも、これがないと、ほんとに何なんかあった時に、企業は吹っ飛んじゃいますよね。
小口:そうです。近頃は、中国がEV車で急加速をしていますが、あれほどに進めてフォローできるのかなと、心配です。
清水:日本に足りないのはスピード。議会、自動車工業会、通信業界、みんなで合意を取りながら進めるのでちょっとスピード遅いんです。
MF:でも、そのスピードが遅いうちに、アメリカや中国が、技術をものにしちゃったら?
清水:そうなんですよ。だから、技術レベルでは戦えるんだけど、仕組み作りみたいなところですね。アメリカは、ドライバーレスのタクシーがもう走っていて、すごいねと思うけど、Googleが投資したのは1兆円単位なんだね。1回乗って2ドルじゃ取り戻せない。だからあの技術はどっかに転換してお金を生んでいくんでしょうね。
 「DriveSafe!」便利に使える安全機能(ASV/ADAS)を解説するWebメディア
「DriveSafe!」便利に使える安全機能(ASV/ADAS)を解説するWebメディアDriveSafe!(ドライブセーフ!) は、ASV (高度な安全技術搭載車両) やADAS (安全・快適な運転を支援する システム) をわかりやすく説明するWebサイトです。
https://drivesafe.jp自動運転技術はどこまでいく?
MF:ところで今、おふたりは自動運転っていうのはどこまで行くものだとお考えになっていますか?
小口:私はね……ちょっと楽観的すぎるかもしれないですけど。クルマの中で行き先を入力して、あとは動く応接室で。システムが最適のルートを選んで目的地に到着する。私はそこまで行くと思っているんです。確かに、開発・設置・運用などにはかなりの時間かかりましょう。今世紀中にできるかどうか。でもね、加速し始めると、やっぱりすごいんですよ。それを私は見ることができないので、好きなことを言いますけども、そこまでいくと思っています。かつて私は、クルマの特性を実感し、ハンドリングを楽しんで、自由に目的地に行きたいっていうのが、従来の希望でしたが、歳を取ってきますと、それができなくなります。特に歳を重ねた人にとってのモビリティは、クルマが非常に重要な役割を果たしています。ところが人は加齢により運転できない時がきます。必ず。人の本能は食欲と同じように「モビリティ欲」が誠に大ですから、その点からも自動運転によるバックアップが不可欠です。物事はニーズが強いほど、その目的に繋がっていくと信じているんですよ。少々甘いでしょうかネ。
なお、ご参考までに 「図4 ヒトの平均寿命の進化論」を示します。

清水:いや、本当に先生の言う通り。僕も自動運転の実現より火星に移住する方が早いんじゃないかなと思ったときもあったんです。しかし、この前、ホンダの三部社長は、10兆円投資する。7兆円、8兆円ぐらいバッテリー開発への投資なんだけど。やっぱ自動運転やるって言っていました。あの時に地図はいらないって言ったよね。人間の目は地図見てないよね、と。だから、人間が見て、カメラで見て、自己位置を推定、きちっと認定できて走りながら地図を作っていくようなシステムは、ホンダは開発しているみたいなこと言っていました。
MF:常総市で試験をしているシステムですよね。
清水:そうそう、うん、だから三部さんは意外と早いって言っていたよね。
MF:プリミティブな疑問として、例えば簡単な、その辺にある横丁、十字路のブラインドに何にもないですよね。そういうところは、必ずそこで情報をクルマに伝えるカメラやセンサーを設置しなきゃなんないわけですよね。
清水:インフラってこと?
MF:そう、インフラ。日本の都市のすべては無理として、道路構造からしても物理的にかなり無理があると思うのですが。
小口:それがね、できるようになる。これが不思議なんです(笑)。いや、面白いですよ。この世の中ってのはね、ニーズが優先されるんです。こうあって欲しいと思えばそうなりますよ。これが、賢い人間社会だと思います。ただし、紆余曲折はあります。電気自動車の歴史をみますと1899年のジャメ・コンタント号(フランス)からスタートし、二転三転して、内燃機関にその座を渡し今日に至っています。でも、妥当なニーズがあれば、いずれはそこに収まるでしょう。自動運転もかくあり、と思います。
清水:ホンダセンシング360の話ですが、2030年頃のミリ波レーダーは、交差点の見えないところに電波が入って人間は見えないけど、自動運転のセンサーはブラインドが見える。結局、ホンダのオートバイを助けたいんですね。見る技術が2030年頃来るって言ってましたけ。
小口:法律の問題もそうですが、私は、学術体系がいつの日か大きく変わると思っています。これまでの専門別学術体系は容易でわかりやすいのですが、学術のためならばそれでよいでしょうが、人類社会のための目的思考の学術体系に。
清水:そこは大事ですね。
高質な学際思考による新たなモビリティへ
小口:ディメンション(次元)が異なるモノを組み合わせて、目的・機能・性能などを重視した学際思考の学術体系が構築されることでしょう。いよいよ、その入口に差し掛っていると思いますよ。すでにその兆候はチラチラと。従来の学術体系とは異なる学際思考の体系です。ここに、図5ミライ車創りの「4つのウエア」を示します。
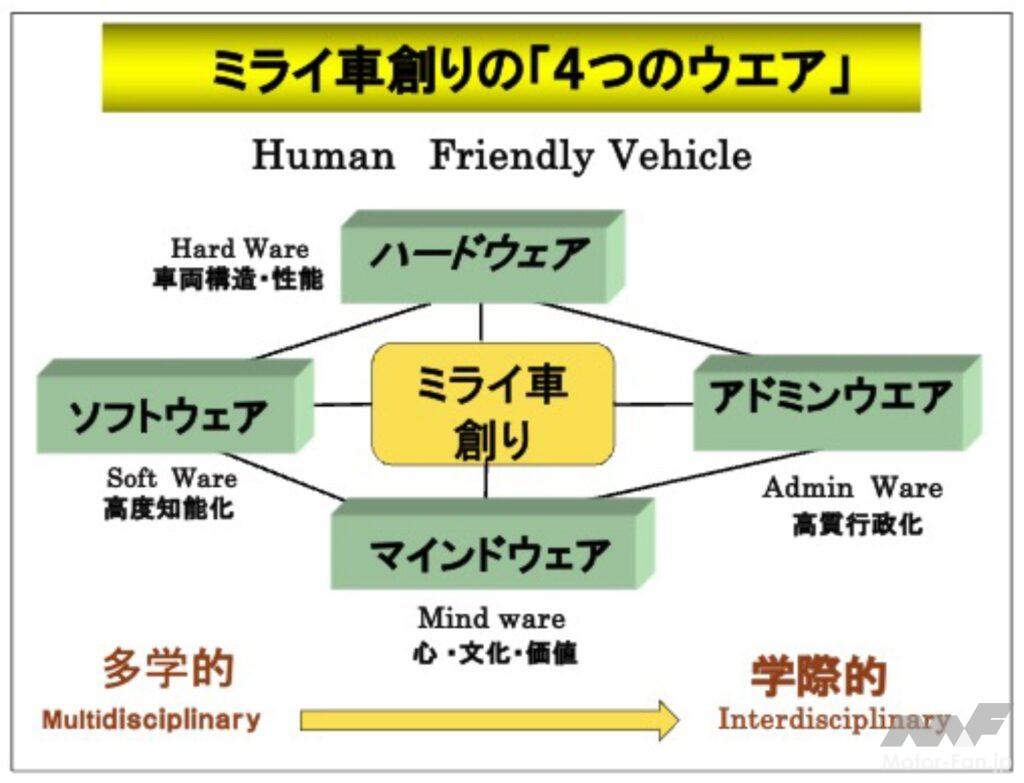
小口:モノ創りは、改めて申し上げるまでもなく、かつては主として「ハードウエア」「ソフトウエア」によって構成されていました。その後、そのモノの文化的視点や価値や意義など人々の心の働きなどの「マインドウエア」も配慮したモノ創りへと進化し、一段と充実してきました。近年では加えて「アドミンウエア」いわゆる個々人を超えた地域や国家レベル、さらには世界レベルでの意義や価値を配慮した「高度行政の視点からのモノ創り」が求められます。まさに学際思考のクルマ創り、その道は決して容易ではありませんが、かくありたいものです。
MF:まさに学際思考のモノ・コト創りですね。モビリティ進化論の世界ですね。さて、自動運転についてですが、清水さんはどこまで行くとお考えなのでしょうか?
清水:自動運転といっても、その設定条件、ODD=運行設計領域(Operational Design Domain)って言われているね。どこからどこまでみたいな。完璧よりも、その人の欲しいところ。僕の場合だったら、めんどくさいところが自動運転で渋滞しなかったら自分で走った方が楽しい。そうじゃない人もいる。免許を返した人はやっぱりドアtoドアで。だからいろんなものが出てきていいと思うんです。ただ、それにはその道路構造を変えないとダメも。法律もそうなんだけど、こんなぐちゃぐちゃな道路の中で、もう自転車からもキックボードから、もう縦横無尽の究極の混在交通ですよね。だから、頭を使って道路再配分をやって、そこにもう少し厳格なルールを入れる。スマホ歩きなんか絶対取り締まり対象ですよね。
小口:クルマについては、その機能・構造・性能を大幅に変更することは容易ではないと思いますが、可能でしょう。ところが道路機能・構造・働きの急速な変更は、難しいでしょうね。住宅やお店などそれぞれの人が権利を持っているわけですから。しかしそこに手をつけない限りは本格的な変革は望めない。無理をせずに「ジックリ・シッカリ」の歩みがいいでしょうね。
清水:だから廃虚になって木が育っちゃって何にも見えないとこもあるじゃない?でもそれは権利の問題で勝手に伐れないとかね、そんなのがあまりにも多くて……。
小口:地域によって、住み分けが行なわれる。その地方で理解が定着し、環境が比較的良いと、例えば今、出雲で自動運転が動き始めていますけども、あのような非常に小さいシステムから始めること、賢いと思いますね。
MF:今先生おっしゃったように、エリアで自動運転が実現する可能性はありますよね。
小口:そうですね。なかには立ち上げても維持できないところもありましょうが、適材適所であれば発展し、生かされるでしょう。好事例が増えてきますと、一気に空気が変わるんですね。私は今、その方向に動きはじめていると思っています。
清水:向かっていますね。意外とロボットMaaS的な、公共交通的な自動運転はあると思います。乗用車はまだまだレベル3止まりですね。それよりも、レベル2のADASの運転支援の方をもっとしっかりレベル上げて、ホンダセンシング360みたいにして、予防安全で事故をなくしていく。
小口:ホンダの取り組みが、ひとつの大きなきっかけになるかも。この話を初めて伺った時、ヤッタナと思いました。これはモビリティ社会の新たな道しるべとして期待したいです。ただし、テスラやGMも苦心惨憺、一朝一夕(いっちょういっせき)ではコトは進まないでしょうが、ともかくはその熱意こそが不可欠でしょうネ。
清水:ホンダのL4ロボットは東京で500台走らせるってコミットしています。
小口:東京で実現したらインパクトがありますね。
清水:いい話です。ミシガンにあるメイモビリティはトヨタが出資しています。自動運転でGoogleと同じようなことやっているんですけど、ここが東京の臨海部で自動運転レベル4をやるんです。いよいよアメリカのベンチャーが日本に入ってきます。実証実験も始まっているので、面白いと思いますね。
小口:これからがいよいよ真のモビリティ社会、自動運転の戦国時代。それが必ず新たな道を探り出すと信じているんですよ。私は、三途の川を渡っても見ていますから(笑)。
清水:去年あたりなんか自動運転つまんなかったんですけども、今年、24年度になってから、DX庁の河野大臣が旗を振っているから結構スピードアップしてきました。
小口:清水先生のお話伺って、いいなと。もう少し長生きしてみたいと思いました(笑)。本日は、ありがとうございました。
清水:先生、また情報交換をしましょう。

 動き始めた学際思考のクルマ創り Human & Eco Friendly Vehicle【シン自動車性能論】 | Motor Fan|自動車情報のモーターファン
動き始めた学際思考のクルマ創り Human & Eco Friendly Vehicle【シン自動車性能論】 | Motor Fan|自動車情報のモーターファンはじめに(序文) 時代は変わる。人々の想いや生活心情そして趣味なども変わりましょう。もっとも大きく変わるのは仕事の中身でしょう。それは好き嫌いの問題ではなく、生きることの基盤とその文化の確立に直結しているからです。あえて […]
https://motor-fan.jp/mf/article/255337
連載 シン自動車性能論

車の知識の関連記事

実は知らなかった…「4歳まで後ろ向き」が重要! ボルボが教えるチャイルドシートの正しい使い方


微妙な価格差?の「ポルシェマカンT」と「マカンS」を比較【どっち買う?重箱の隅ツツキ隊:09】

「レクサスIS」のシートとトランクはやはりオーソドックス?[実用編]【最新モデルコクピットドリル:08】

『トミカ』に人気のキャンピングカーが登場! ホンモノさながらの遊べる1台、キャンピングカーの種類と特徴も解説!【トミカ × リアルカー オールカタログ】

スズキの「S」マークの由来とは?100年以上受け継がれる歴史を解説【自動車エンブレム秘話38:スズキ】
