
スゴイ! 日産のe-POWER 4WDの実力を路面μ0.1の氷上で体験 「電動」で四駆が変わる! ノート/ノート オーラシリーズ4WD試乗















ミリSECで制御できる電動4WDの凄味

e-POWER FWD:KICKS/ノート オーラ/ノート オーラNISMO
BEV FWD リーフ
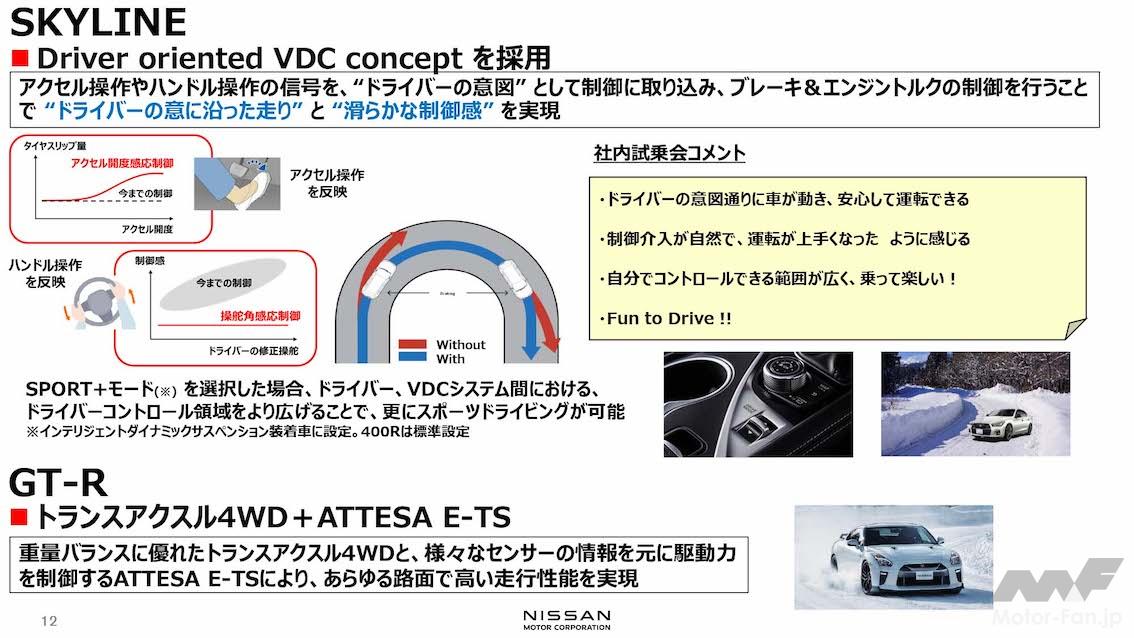
FR:スカイラインGT/スカイライン400R
4WD(ATTESA-ETS):GT-R
最近の4WDシステムの進化は目を見張るものがある。駆動輪ではない側(FFなら後輪、FRなら前輪)にどうトルクを伝えどう制御するのか、については長年の開発のおかげで、スタッドレスタイヤを履いていれば、もはや通常の積雪路で困ることはない。
自動車メーカーの4WDスペシャリストが考えているのは、ただ走れるだけではなく、「より安全に」「より楽しく」「より燃費に優しく」「どんなレベルのドライバーが乗っても」走れるようにすることだ。そこで重要なのは制御技術だ。さまざまなセンサーで検知した車両の状況をコンピュータが計算し、駆動力だけでなくトルク配分やブレーキ制御までコントロールする。
さらに進んだ4WD制御で注目されるのは、「電動4WD」である。FFの場合だと、前輪はエンジンで駆動、後輪はモーターで駆動するタイプが増えてきた。今回長野県女神湖で体験する日産e-POWER 4WDは、前後ともモーター駆動の電動4WDシステムだ。

一般的には、路面の摩擦係数(μ=ミュー)は、舗装路のドライ路面が0.8、ウェット路面が0.4~0.6、積雪路が0.2~0.5、氷結路が0.1~0.2と言われているが、この日の女神湖の氷上は0.1ほど。注意深く歩かないとすぐに滑って転んでしまうくらいツルツルの路面だ。ノーマルタイヤでは発進すらできない路面。ちなみに試乗車はすべてブリヂストンのスタッドレスタイヤ(ブリザック)を履いていた。
e-POWER 4WDのノートシリーズを中心に、氷上に設けられたコースを試乗した。自分のクルマだったら、絶対に走らないだろう極低μ路だが、試乗会のコースは完璧にコントロールされている。氷上のコースは、たとえコースオフしても大クラッシュに至らない(クルマも壊れない)ようになっているが、とはいえ衆人環視のもと、あんまりカッコ悪いスピンもしたくない。最初はソロリソロリと走ってみた。ノート オーラ4WDは何事もなくコースをクリアできる。ワンペダル操作が可能なモードではブレーキを踏むことなく走れる。

慣れてきてスピードが上がっていくとコーナー入り口で減速して向きが変わったところでアクセルオンすると前輪が引っ張ってくれると同時に後輪が押してくれるのが感じられる。さらに、ハンドルを切った方向にフロントが入っていくのが実感できる。これは楽しい。
FWDのノートの場合は、コーナーで曲がりきれずにフロントが外へ逃げていってしまった場合、アクセルを戻してじっと待っているしかないが、e-POWER 4WDの場合は、そこでアクセルを踏むとドライバーが姿勢を制御できるのだ。少し運転がうまくなったような気がする(もちろん錯覚なのですが)。
タイヤの回転角度5度で制御ができるのが電動4WD

試乗を終えて、日産の電動4WDシステムを担当する富樫寛之さん(日産自動車カスタマーパフォーマンス&CAE・実験技術開発本部車両性能開発部 操安乗心地性能設計グループ主担(兼)パワートレイン・EV技術開発本部パワートレイン・EV性能開発部動力性能計画・PT性能統括グループ主担)に聞いた。
富樫さんはこれから出てくるe-4ORCE(アリアが搭載する電動4WDシステム)も含めて直近の日産電動4WDすべてを担当しているスペシャリストだ。

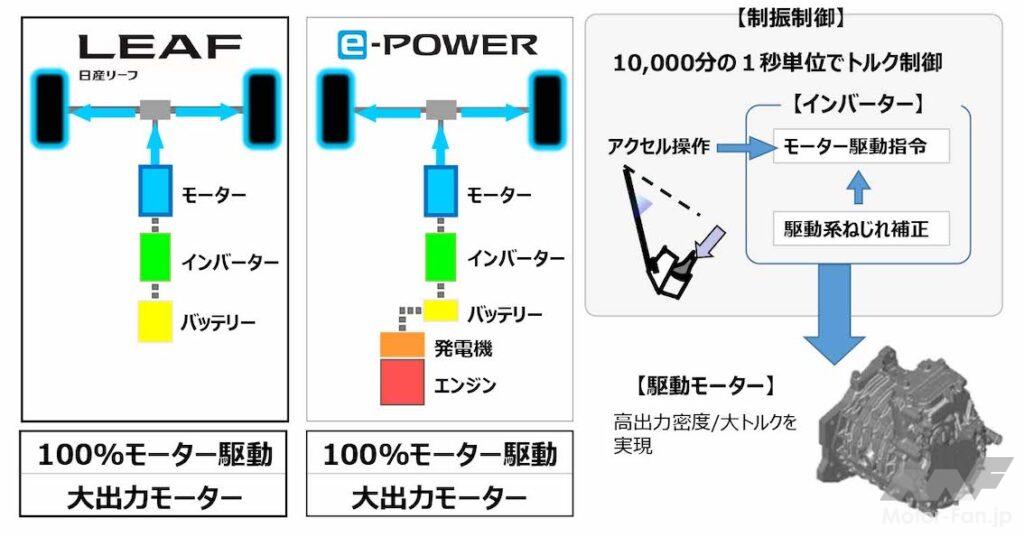
富樫さん 制御自体は1万分の1秒単位といっていますが、実際のコントロールはそこまで速くはないです。50ミリSEC(1000分の50秒=0.05秒)くらいで、それでもかなり速いです。ミリSECオーダーではコントロールしています。そこは電動だからできることで、ガソリンエンジンだとオーダーは一桁違います。ガソリンエンジンだと0.2秒(200ミリSEC)くらいですね。
 日産ノート4WD(X FOUR)身のこなしは軽く、瞬発力が高い。ラグビー選手に例えれば、機敏に動き回るスクラムハーフのようだ
日産ノート4WD(X FOUR)身のこなしは軽く、瞬発力が高い。ラグビー選手に例えれば、機敏に動き回るスクラムハーフのようだ新しい日産ノートの4WDはもちろんe-POWERだ。その上でリヤに68ps/100Nmという強力なモーターを搭載した。つまり電動4WDである。この4WDの開発には日産技術陣の気合いが感じられる。ノートのヨンク、どんなクルマか? TEXT & PHOTO◎世良耕太(SERA Kota)
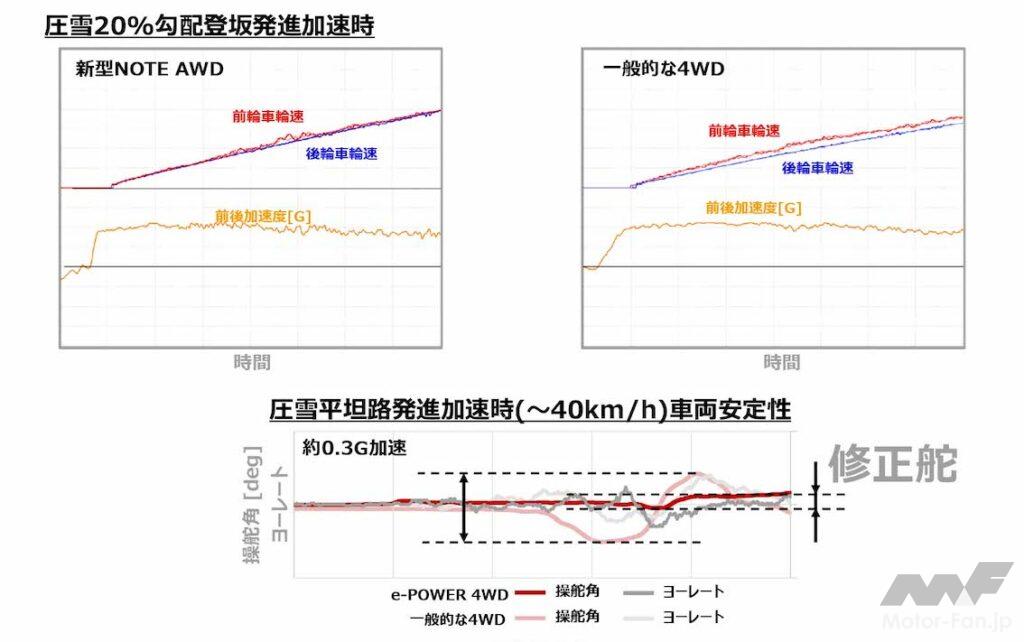
https://motor-fan.jp/mf/article/30901/富樫さん 普通のエンジン車だと、タイヤが滑って、車輪角度が40度とか90度とか結構滑ってからトラクションコントロールでそれを抑えに行くのですが、抑えたときには、またさらに滑っていて、そこをまた抑えにいくので、抑え過ぎが起きてしまいます。それが電動車ですと制御が無茶苦茶速いのです。タイヤの回転角度が5度とかで、当然滑っているのですがそこで制御ができます。電動とはいえ、やっぱり滑ってしまうのですが、滑った量が全然違うので、まるで滑ってないかのように感じられるんです。

MF エンジン車の場合、4輪のどこか(あるいはいくつか)が滑ったときは、ESC(いわゆるスタビリティコントロール)が滑ったタイヤのブレーキをつまんで抑えにかかるわけですよね。
富樫さん エンジン車の場合はタイヤが滑ったらESCでブレーキを掴んで止めにいくわけですが、電動車の場合は、ESCが介入する前にモーター自体が「速く回っちゃったかな」っていうのを検知して、すぐに制御に入ります。モーターを制御しているのに、モーターで検知しているので、めちゃくちゃ速いんです。
ところが、エンジン車の場合、ブレーキ制御とかブレーキ制御コントロールのTCS(トラクションコントロール)からエンジンに指令を送ってコンピュータが燃焼を下げてくれ、っていうサイクルだと、やはりスピードが遅くて0.2秒というオーダーになってしまうんです。
制御の正確性も違います。電動車のモーター制御の場合、このくらい滑っていたらこのくらいモーターの出力を落とすんだという下げ代が正確で、その路面μの一番いいところのポイントに向かって下げていけます。
エンジン車だとμカーブを見ていって出力を戻そうとするとちょっとオーバーシュートしてしまいます。ESCもそうです。ブレーキ圧を油圧で立ち上げるので一番いいところを通り過ぎてしまう。


そもそも、電動4WDの場合は、エンジン車よりESCの介入は少なそうですね。
富樫さん 電動車の場合は、ブレーキというマイナス方向ではなく自分自身のエネルギーを減らすだけなので、圧倒的に無駄もなく制御スピードも速い。2WDではESCで内輪をつまんでヨーレートを創り出してアクティブアンダーステアコントロールをインテリジェントトレースコンロールの一部でやっています。旋回加速していくと膨らまないように内輪のブレーキをつまんで曲げていくのですが、それでブレーキでエネルギーを損失させながら曲げていくのではなく、4WDでできるだけ損失なくいきたいなという想いがありました。そこを考えながら作ったのが、100Nm/50kWというのも、そういうことを考えた上の配分です。
新開発のリヤモーターのスペックは、ノートのパッケージングや荷重を考えて一番いいところということで決めました。あれ以上のパワーは必要ないということでスペックを決めました。じつはキャパシティ上、モーターは出力もトルクももっと出せるのですが、普通のドライバーが普通に安心して乗れる、かつ爽快さを失わないというところで考えるとここが一番だと考えています。
アクセルペダルをちょっとポンポンって踏んであげると、ヨーレートを少し作ってくれるようになっているのですが、もっと出力を上げるとそのヨーレートが速くて、少しお尻が出過ぎになってしまうので、100Nmで充分なのです。

NISMOのようなスポーツに振ったクルマではもっと高出力のリヤモーターを積むことはできるか、という問いに
富樫さん 技術的にはできます。このパッケージは100Nm/50kWで決めていたので、そうするにはバッテリーのサイズを上げたり、それを送るハーネスのキャパを上げたりする必要があります。そうすれば、モーターの出力を上げていくことはできます。これからあのモーターを使って、いろいろなクルマを作っていく可能性があるのですが、そのときもそのクルマにあった出力/トルクというのを考えています。
MF BEVのアリアに搭載されるe-4ORCE(イーフォース)にもすごく興味があって期待しているのですが……。
富樫さん 今回乗っていただいたe-POWER 4WDというシステムは、これまで日産がやってきた電動化技術と4WD技術を組み合わせたものになっています。これがe-4ORCEになるとさらに一段レベルを上げた統合制御をやっています。ノートシリーズですと、そこまで統合制御しなくてもお客さまが求めている期待以上のレベルを達成できるという自信があったので、そこまでやっていません。アリアの場合はバッテリーEVで車重も重たいということもあって、技術レベルも一段上げたものになっています。
富樫さんは言う
「いまは本当にチャンスだと思っています。日産はデファレンシャルなどの技術はそこまで高い次元になかったのですが、逆に電動化で培った技術があるので、その技術でクルマをどう動かしたいかがわかっています。そうすると機械意識のところで縛られていてできなかったところを打破して、前後輪、左右輪のコントロールで相当なオポチュニティがあると思っています。いままで機械式4WDだと、機械なりでいく領域がありますが、電動4WDの場合は、いろんなシーンをイメージして計算して、制御をなにかで持たせなくてはいけないのです。マップで持たせるのか、ロジックで持たせるのか。e-POWER 4WDの場合は予め計算して入れておくマップ制御です。e-4ORCEは両方やっています。状態によってはフィードフォワード制御もフィードバック制御も入っています」

新型ノートシリーズの4WDは思った以上に売れている。そもそも4WDというのはモデルミックスのなかで10-12%くらい売れればいい(富樫さん)だが、いまのところベースのノートでも15%以上、オーラは初期で40%くらい。いま少し落ち着いてきも25%が4WDを選んでいるという(ちなみに前型は12%程度だった)。
富樫さん自身も、もちろんノート4WD仕様を購入したという。
「じつは私は北海道出身なんです。若い頃、叔父から『北海道は4WDでないと。S社の4WDが一番いい』と言われていました。いつか自分が作った4WDで、こっちのほうがいいと言わせたいと思って開発してきました。叔父は残念ながら他界してしまったのですが、このe-POWER 4WDに乗せたかったですね。自信を持って『いま一番いい4WDはこれだ』って言えますから」
モーター駆動の電動4WDは、車両運動制御を新しい領域に引き上げている。富樫さんたちが次になにを見せて(体験させて)くれるのか? まずはe-4ORCEを楽しみにしたい。ノートのe-POWER 4WDで、もう充分すぎるほどいいんですけど、この先がまだまだあるんですか、富樫さん!
 日産ノート オーラ 現代版「小さな高級車」の素質あり!(残念なポイントもあるけれど…)
日産ノート オーラ 現代版「小さな高級車」の素質あり!(残念なポイントもあるけれど…)日産ノート オーラは、「プレミアムコンパクト電動車」という、これまであるようでなかったニッチなマーケットに投入されたニューモデルだ。1週間ほど生活をともにして850km走ってみた。ノート オーラ、確かに大いに「小さな高級車」の素質アリ、である。
https://motor-fan.jp/mf/article/24925/













