体重移動では曲がらない[モーターサイクルの運動学講座・その9]
TEXT&FIGURE:J.J.Kinetickler
MCのコーナリングについて、日本では「体重移動説」(MCはライダーの体重移動で曲がる)という都市伝説が根強く語り継がれています。
曰く、「体重移動」「腰を入れる」「ニーグリップ(タンクを膝で押す)」「ステップの踏み換え」…中には「上体を曲がりたい方向に向ければ曲がる」など、おおよそ科学的ではない議論さえまかり通っています。
米国や欧州では体重移動説はメジャーではありません。欧州の雑誌にはこともなげに「MCはカウンターステアリングで曲がる」と書いてあります。どうも日本では全てのものに必要以上に 「精神性」「精神力」を注入しようとする傾向があるようです。
白バイや暴走族をみれば判ることですが、彼らのライディングは体重移動などとは無縁です。白バイは「徹底したリーンウィズ」(車体とライダーが完全に一体化)、暴走族のスラロームは逆に上体を全く動かさない「極端なリーンアウト」です。
また百歩譲ってコーナー入口の倒し込みは体重移動しているとしても、コーナー出口で体重移動して車体を起こしている人はいるでしょうか? そんな人はみたことがありません。
今回の講義はそのMCの聖域、コーナリングの真実に踏み込みます。
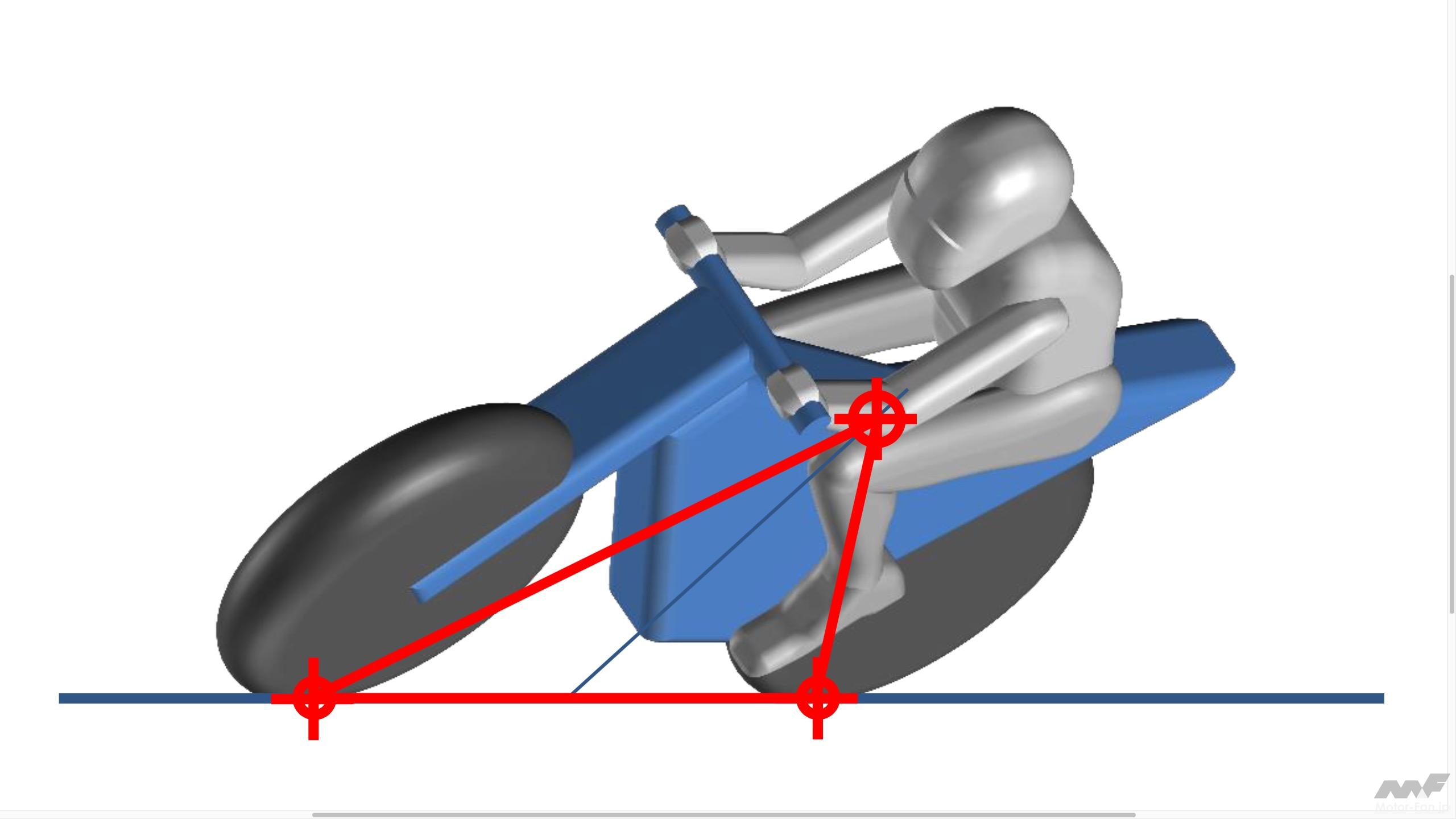
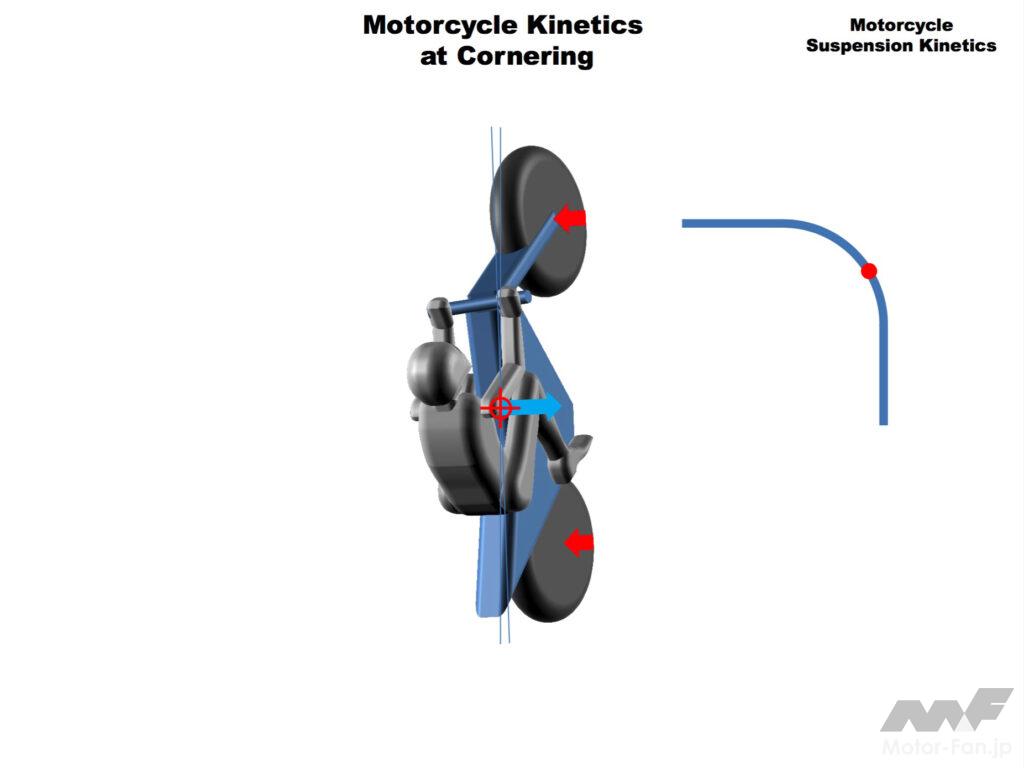
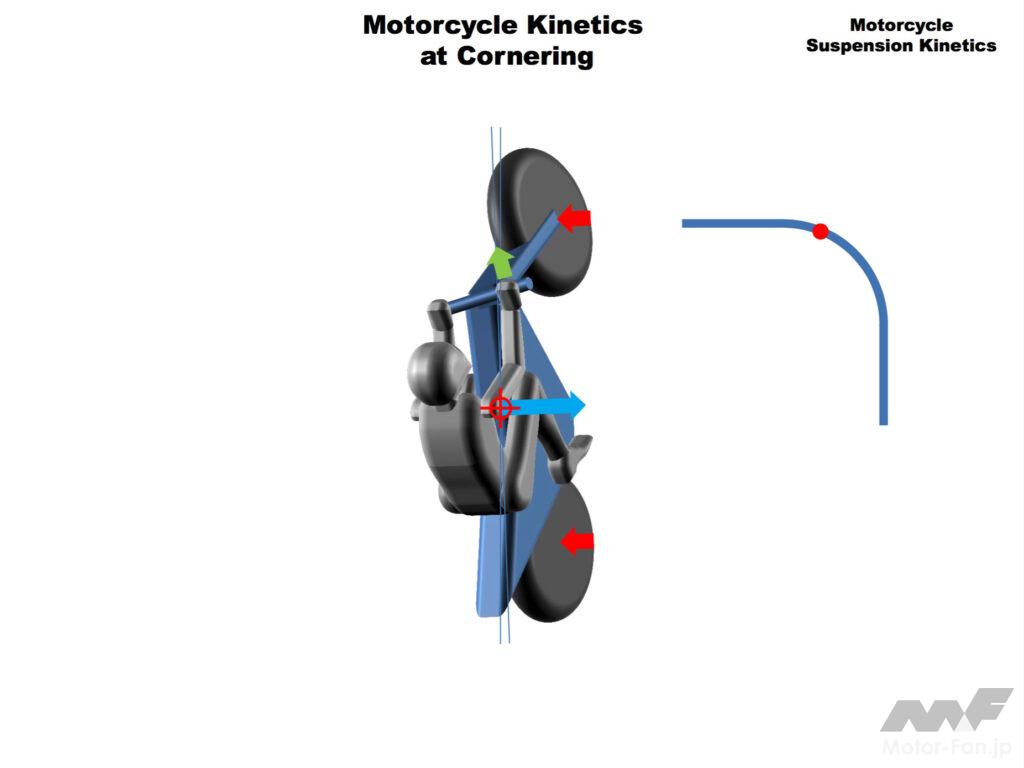
車体を前からみた時の力のつり合い
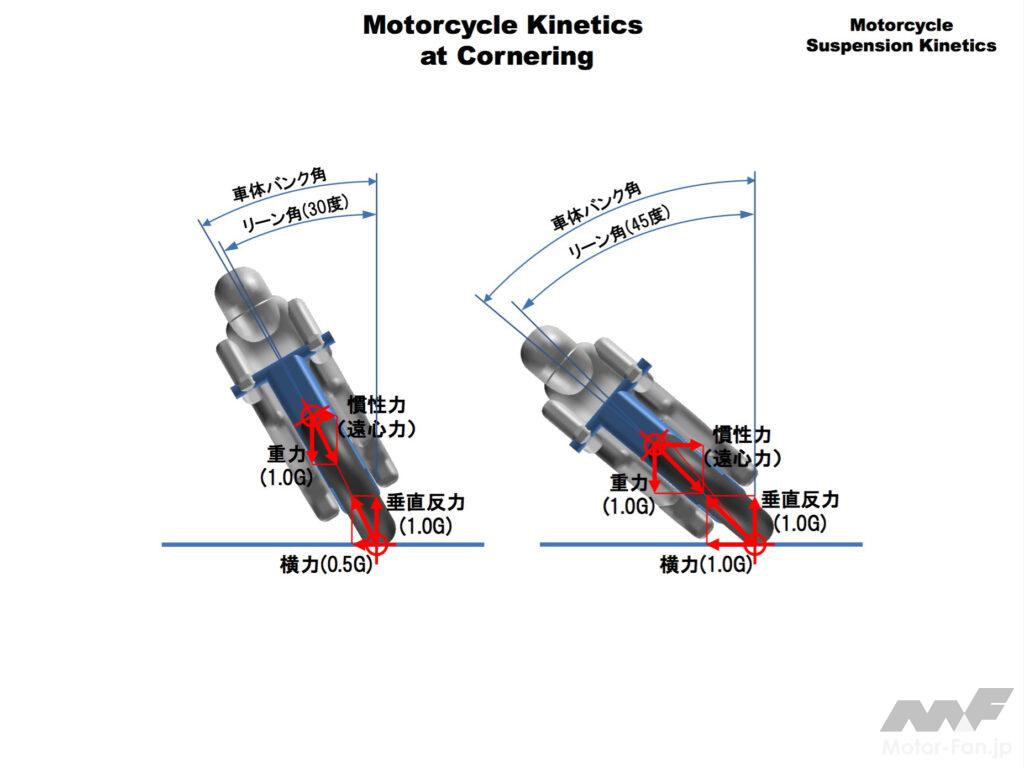
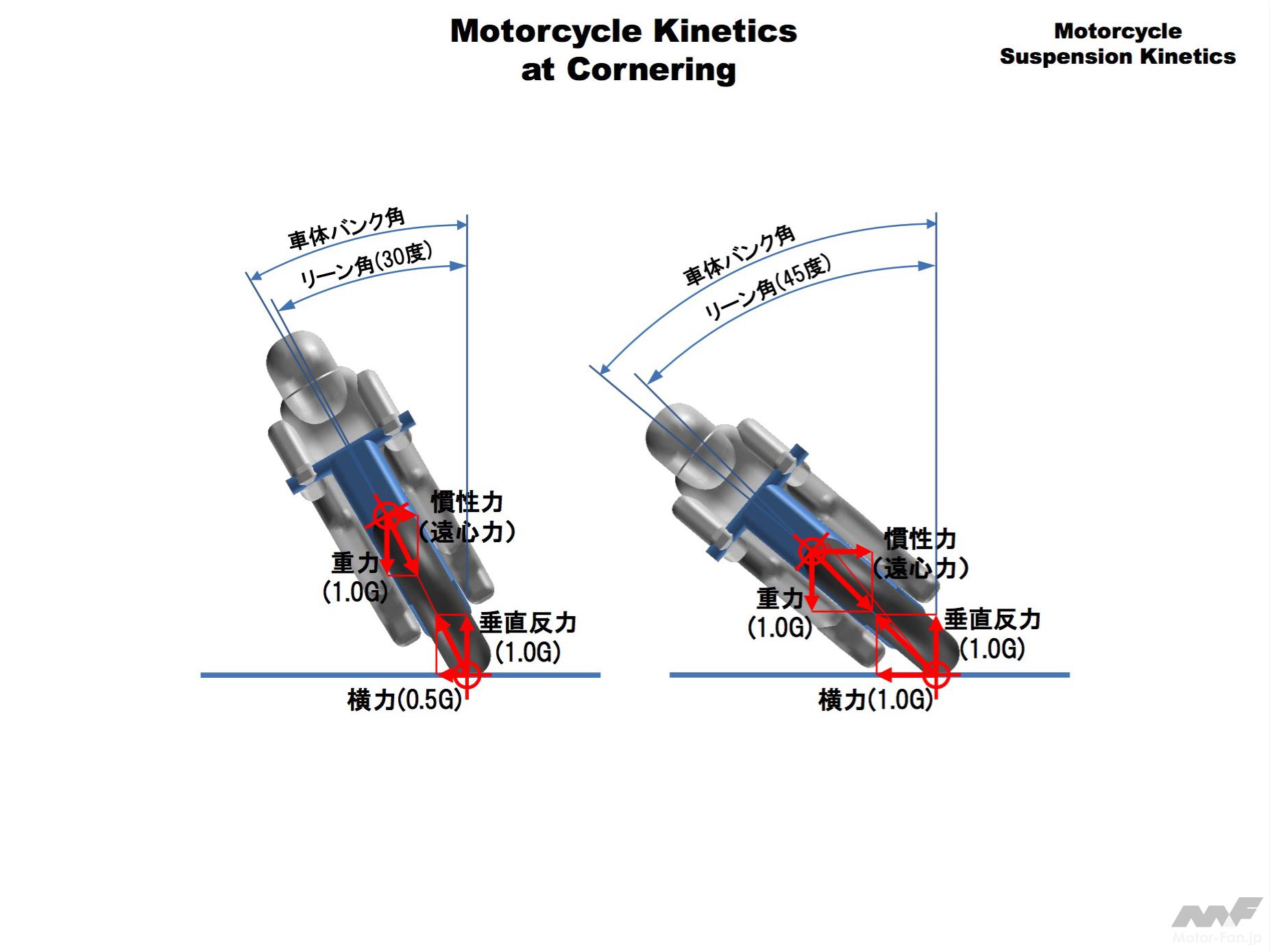
以前の講義でも述べましたが、MCの旋回の基本はリーン(車体を傾けること)です。リーンは『重心にはたらく重力と慣性力(遠心力)の合力』と『接地点にはたらく垂直反力と横力の合力』が同じ線上で向きが反対の力となって釣り合うまで車体を傾けることです。
したがって横力(=遠心力)が大きいほど車体を大きく傾ける必要があります。たとえば旋回時の横加速度が0.5Gで30°、1.0Gでは45°リーンさせる必要があります。
このリーン角度は重心と接地点を結ぶ直線の角度で車体の傾きではないことに注意してください。タイヤの断面形状は丸いのでリーンすればするほど接地点が車体の中心より内側に移動するからです。
車体バンク角はリーン角よりも大きく、タイヤ幅が広いほど、またリーン角が増えるほど大きくなります。この図ではリーン角45°の時、車体バンク角は約50°にもなっています。つまり1Gでコーナリングするためには車体を50°も傾けなければなりません。
サーキットやワインディングロードでライダーが行う、いわゆる「ハング・オン」(正しい英語は ”Hang off”:ぶらさがる)はこの車体バンク角を少しでも減らす目的でやるわけです。決して旋回のきっかけを作るためにやっているわけではありません。
また、車体をリーンさせて旋回するMCは、クルマとは異なり重心高が高くても影響が少ないという利点があります。講義の初回にも述べたようにMCの重心高には適値がありクルマとは違って低ければ低いほどいいというものでもないのです。
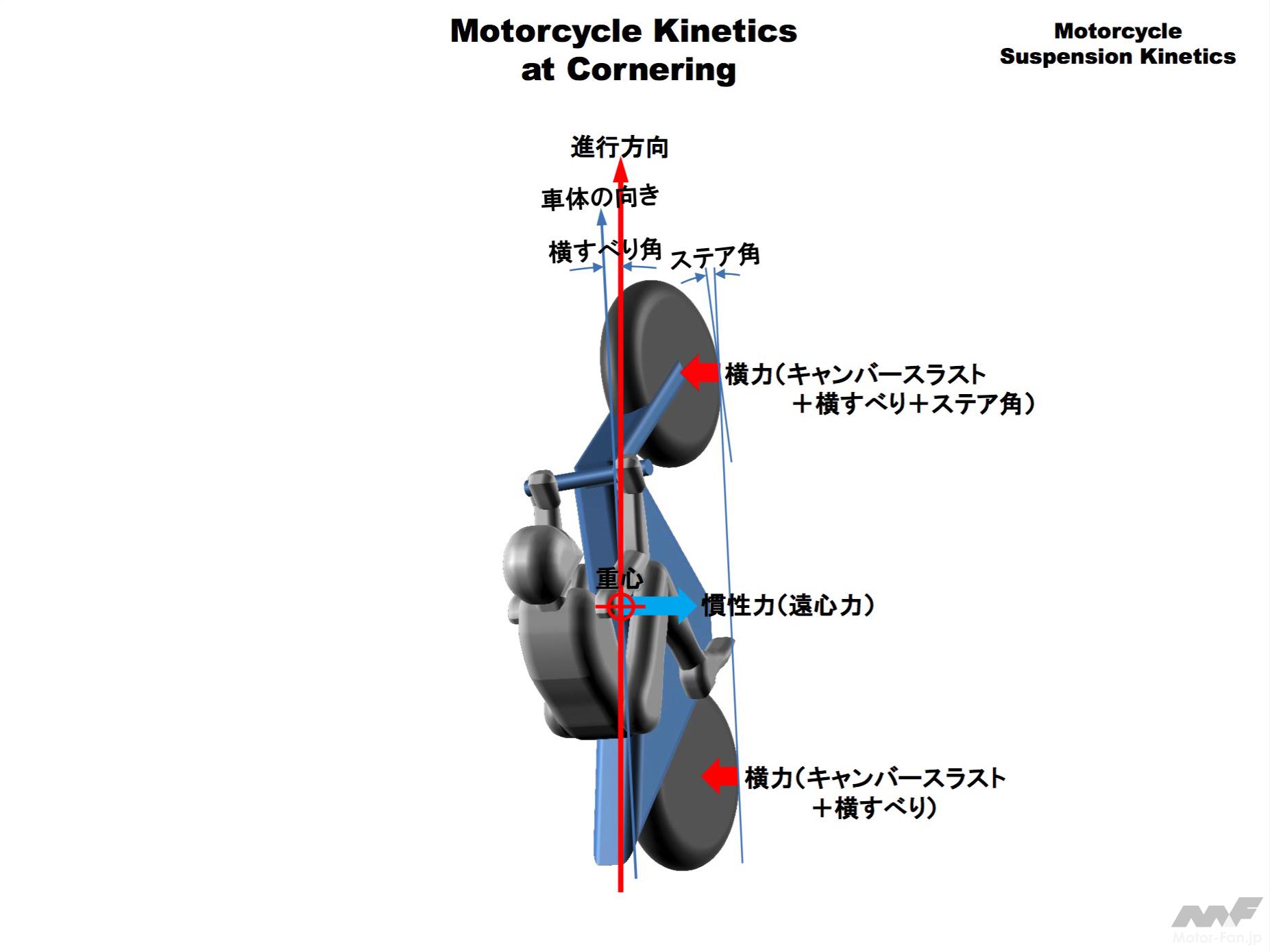
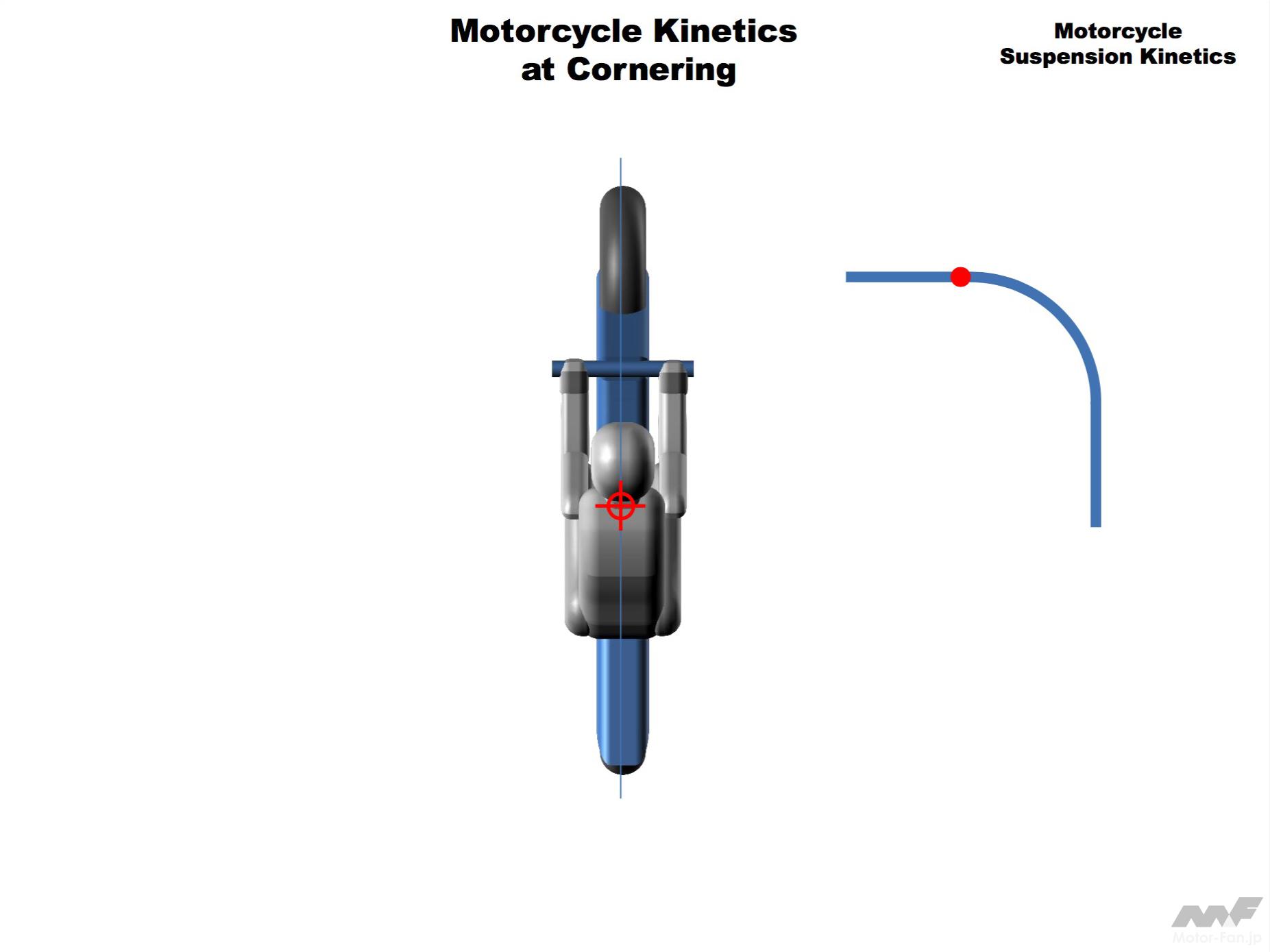
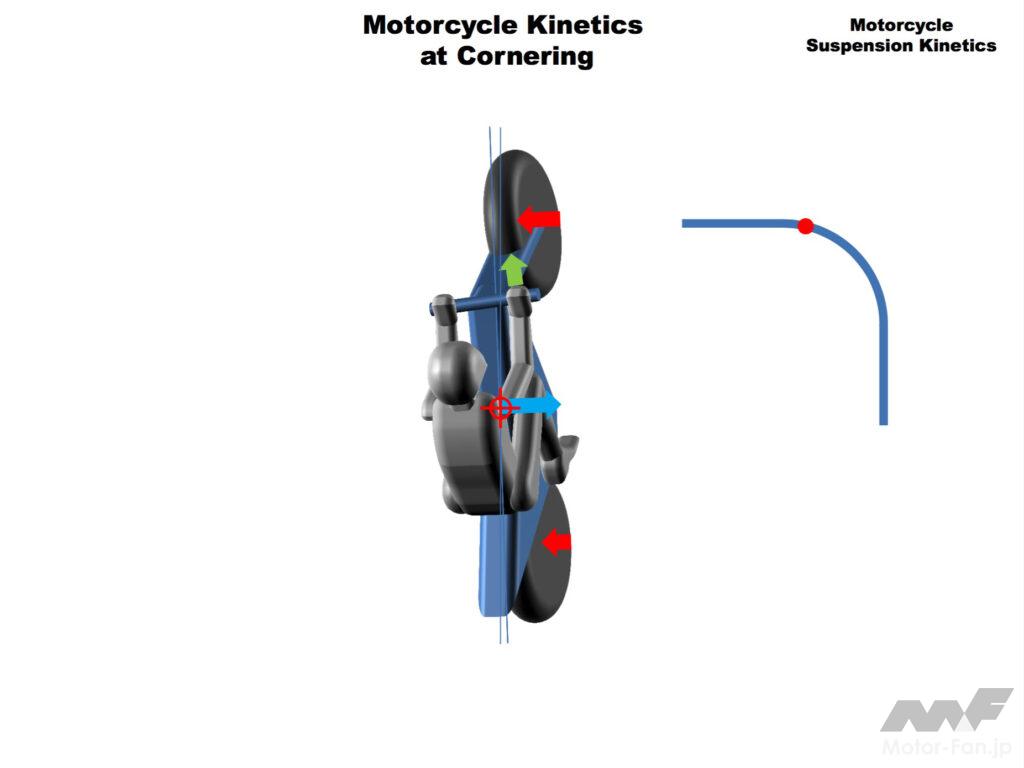
車体を上からみた時の力のつり合い
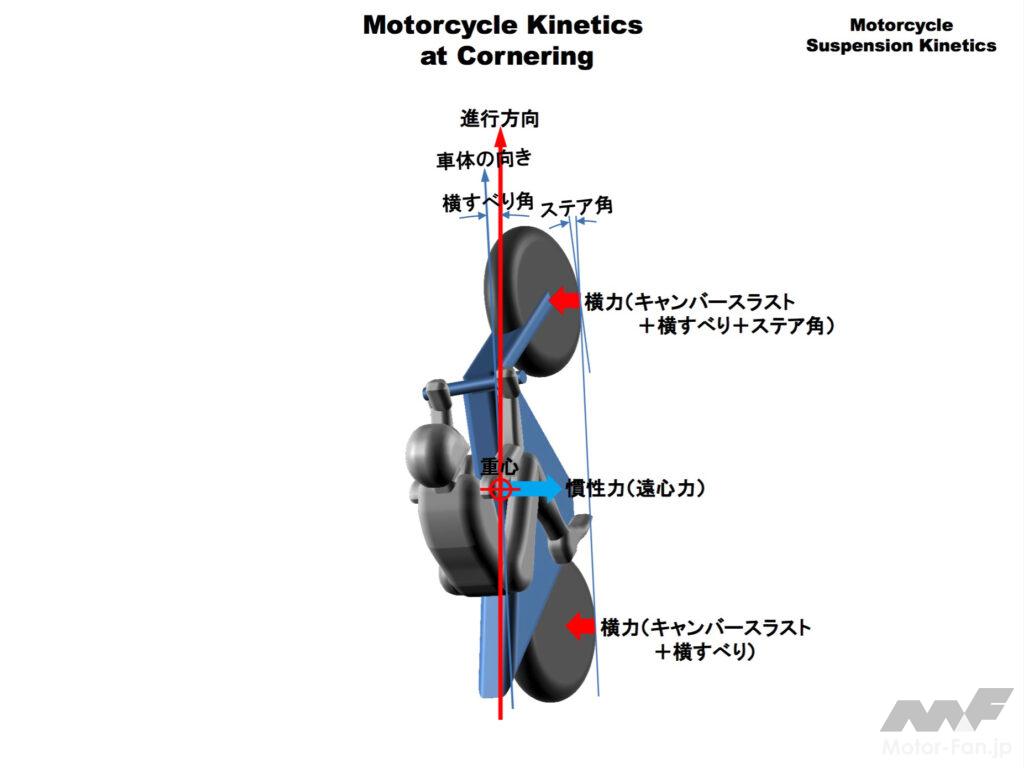
これは旋回しているMCを上から見た図です。
リーンして傾いた前後のタイヤはキャンバースラストにより横力を発生させます。また車体が進行方向に対して角度を持つ場合、その差の「横すべり角」分の横力が発生します。さらに前輪の場合はステア角が横すべり角に加わります。
これらの横力の合計と慣性力(遠心力)、重力が釣り合ってMCは定常旋回します。ただし、MCの場合横すべりによる横力は高横G領域以外では比較的小さく、キャンバー角が20°以下ではほとんどキャンバースラストだといわれています。
この図はわかりやすいように角度関係を誇張して描いていますが、横すべり角もステア角も実際にはごくごくわずかな量であることに注意してください。通常走行ではこの1/10以下だと思ってください。
この状態に持ち込めば安定して旋回できることは、なんとなく理解できると思いますが、直進状態から減速してコーナーに進入、MCを倒し込み定常コーナリングに入り、コーナーの出口で車体を起こしながら加速し直進状態に戻す…というプロセスはどうなっているのでしょうか?
これが本講座の今回の主題です。
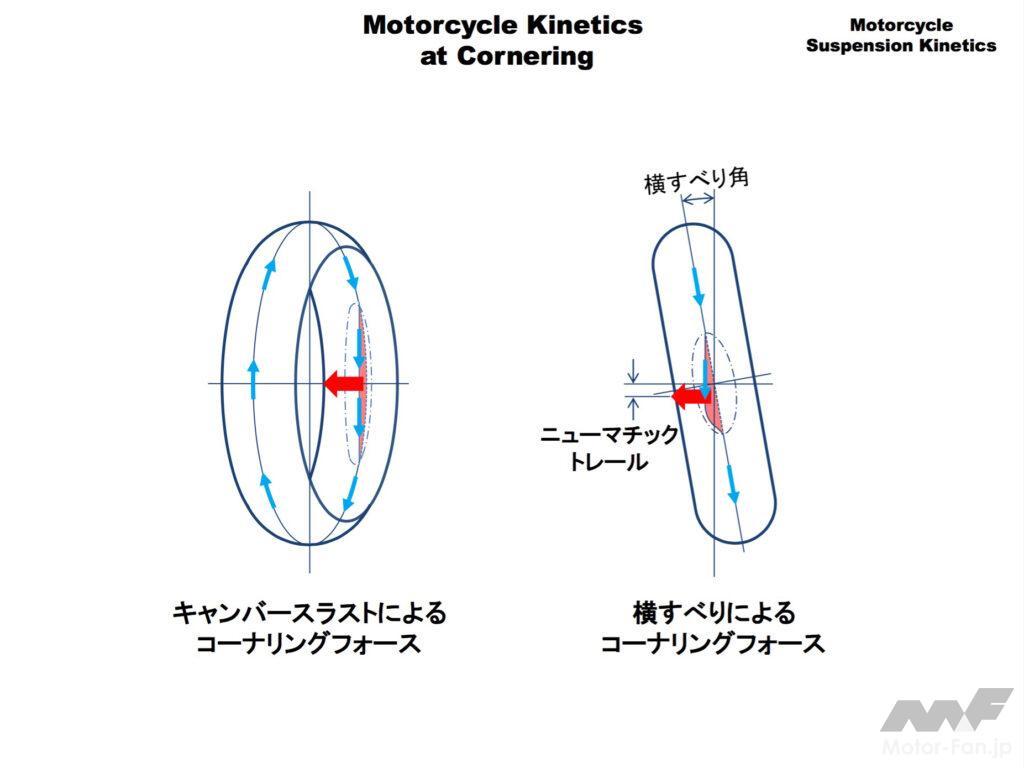
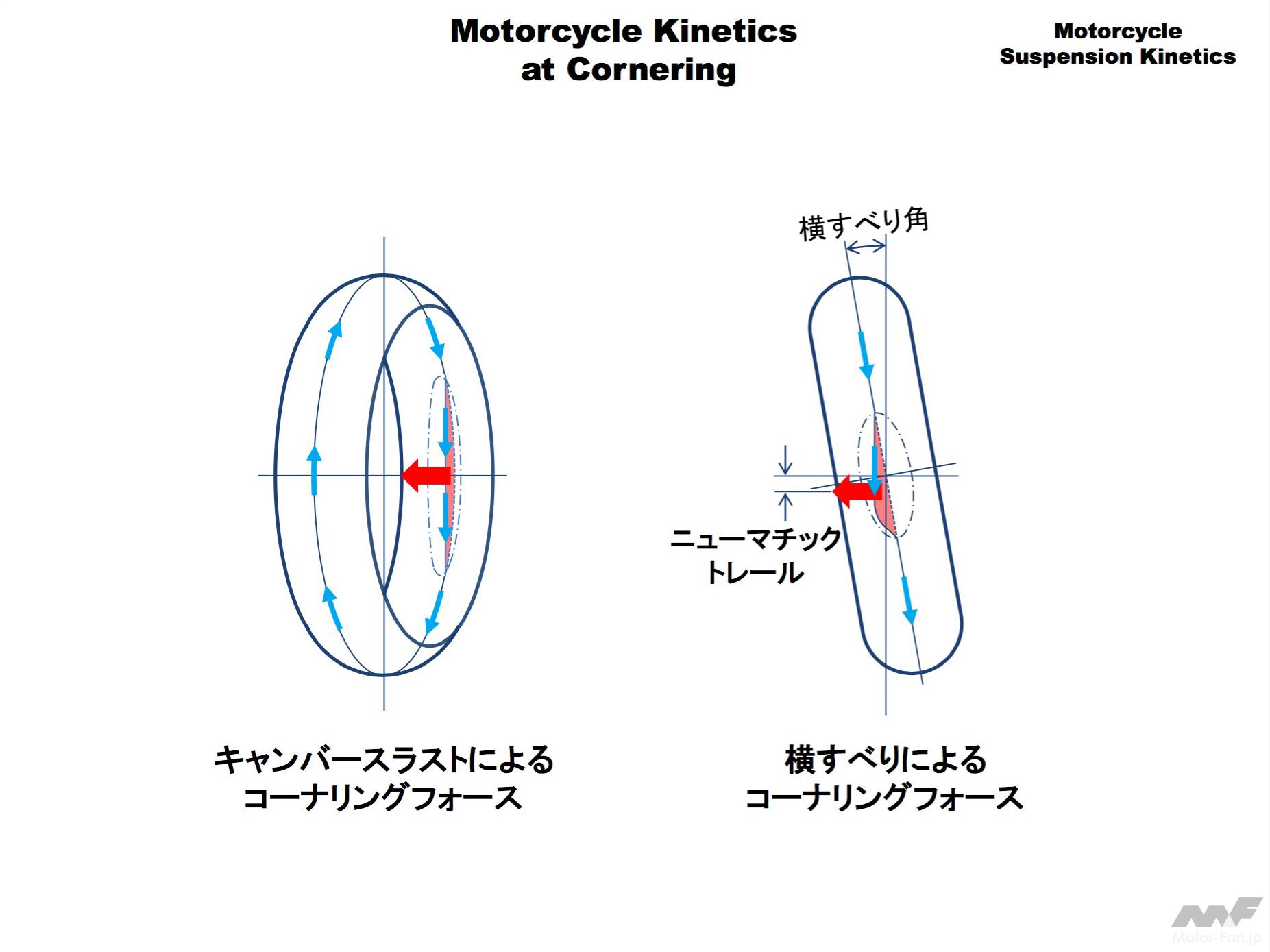
【キャンバースラストによるコーナリングフォース】 キャンバースラストは傾けられたタイヤが発生する横力。よく傾いて転がる10円硬貨や円錐 (えんすい)の転がりに例えて説明されますが、実際は接地面でトレッドゴムが変形して発生する力です。左の図の矢印はタイヤのトレッド上の一点がタイヤが一回転する間の動きを示しています。その一点は接地している間、赤の網掛けのようにトレッドがひずみます。このひずみは接地部全体でおこり、全体のひずみの力の合計がキャンバースラストです。MCはキャンバースラストによるコーナリングフォースが支配的です。 【横すべりによるコーナリングフォース】 右の図の矢印はタイヤ上の一点がタイヤが一回転する間の動きを表しています。その一点 は接地している間、車体の進行方向に曲げられて赤の網掛けのようにトレッドがひずみます。このひずみは接地部全体でおこり、全体のひずみの力の合計が横すべりによるコーナリングフォースになります。クルマは横すべりによるコーナリングフォースがほとんどです。 【セルフアライニングトルクとニューマチックトレール】 ちょっと注目してほしいのが横すべりによるコーナリングフォースの赤の網掛けが前後非対称なことで、面積の中心はタイヤの中心より後ろにあることです。このズレがあるために横すべりによるコーナリングフォースはタイヤの中心より少し後ろに作用します。つまり横すべりによって「セルフアライニングトルク」(横すべりを減らす方向にハンドルを戻そうとするトルク)が生じます。またこのズレの大きさを「ニューマチックトレール」(タイヤのトレール)と呼びます。タイヤのトレールとステア軸で作られるトレールを合わせた分がステアリング軸回りの合計のセルフアライニングトルクになります。キャンバースラストによるコーナリングフォースは前後対称なのでニューマチックトレールはありません。
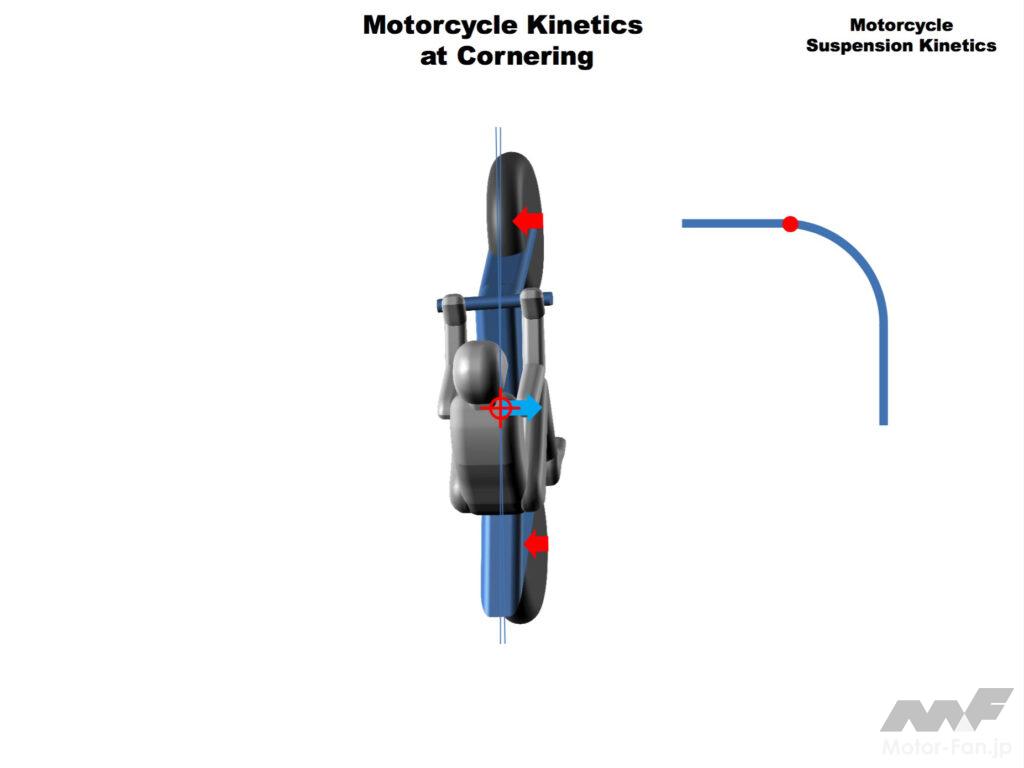
MCのコーナリング
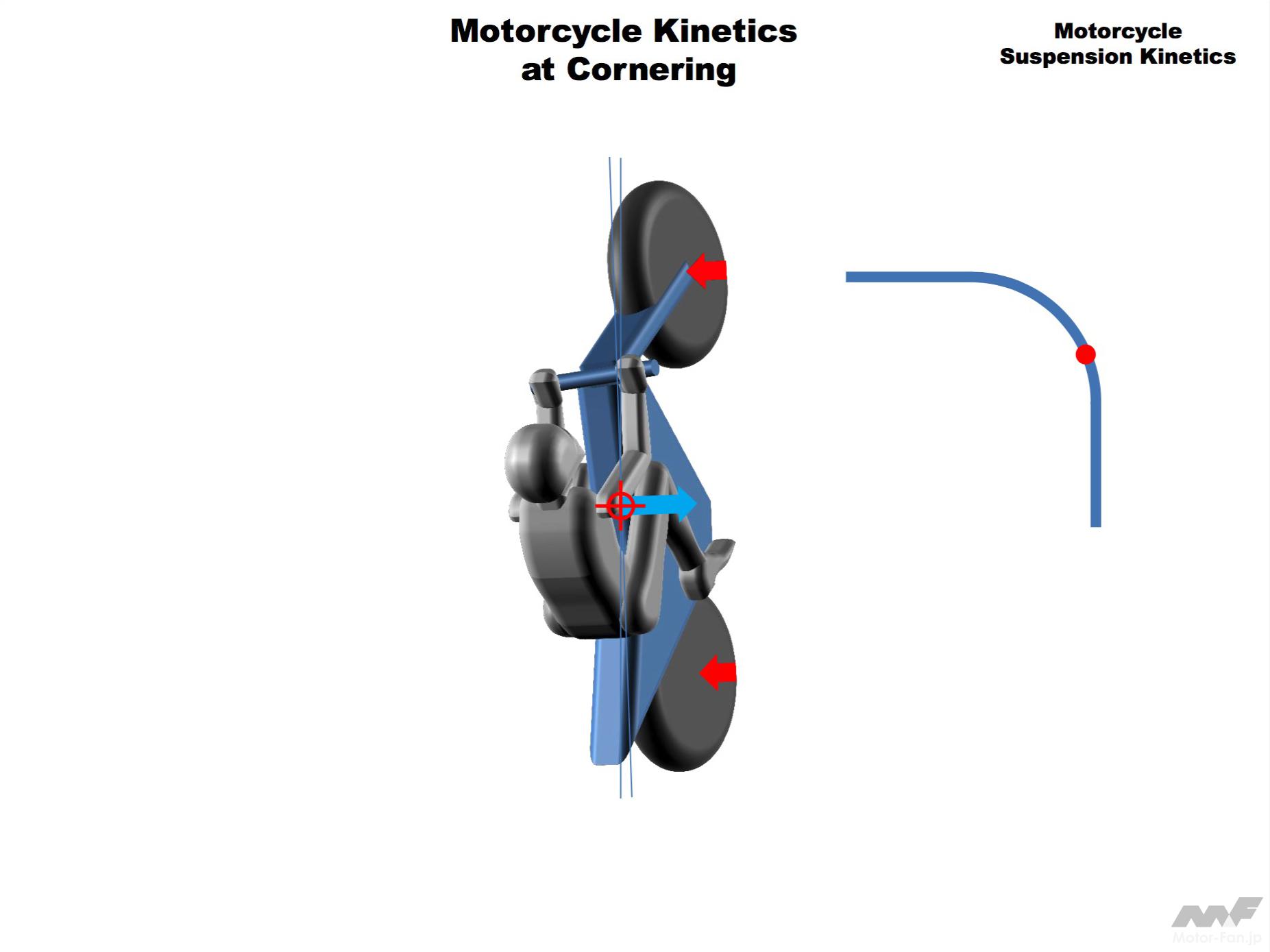
コーナーへの進入 ①
あたりまえですが(あたりまえじゃない?)、MCは体重移動ではなく「ステア」で曲がります。
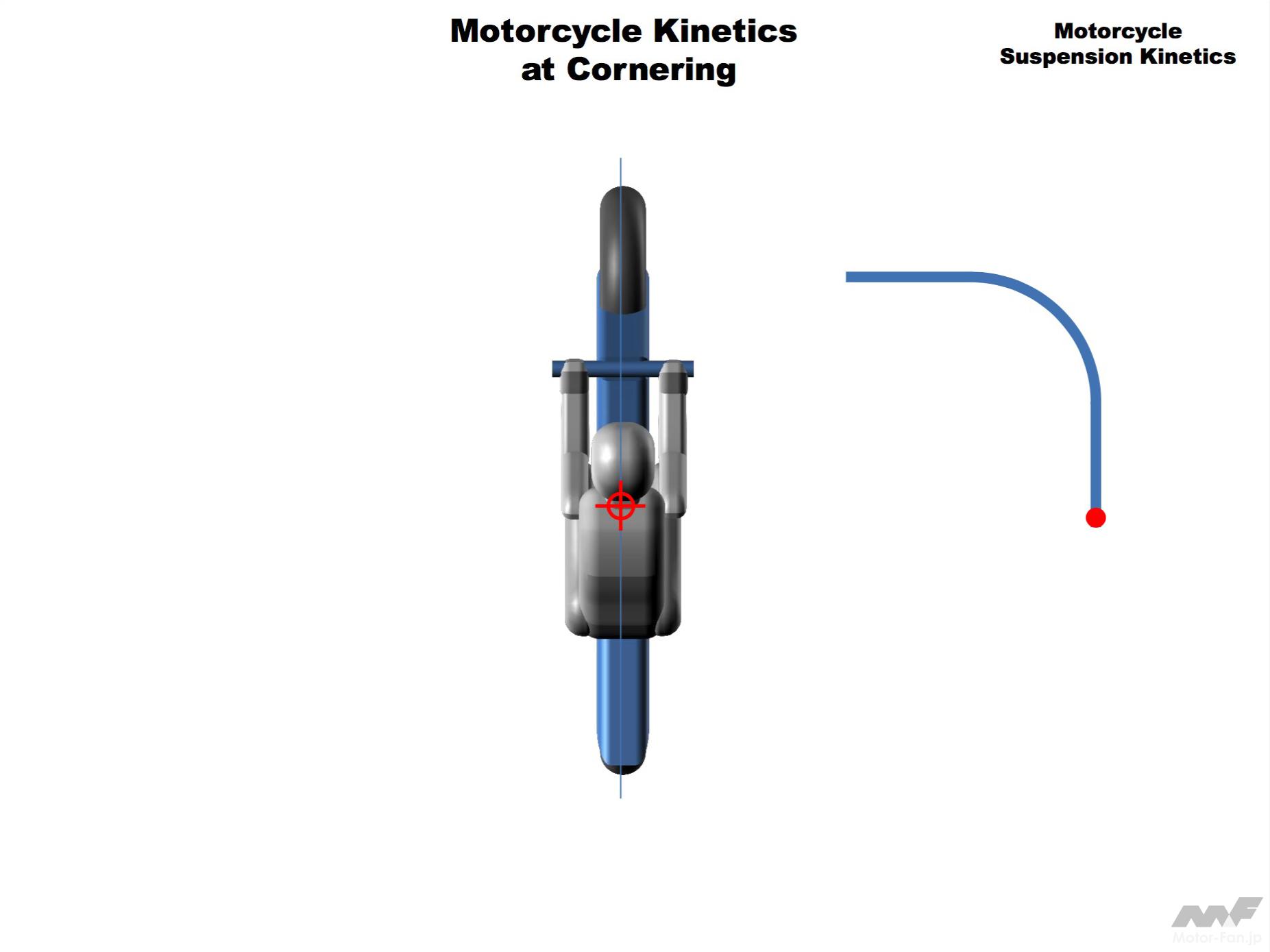
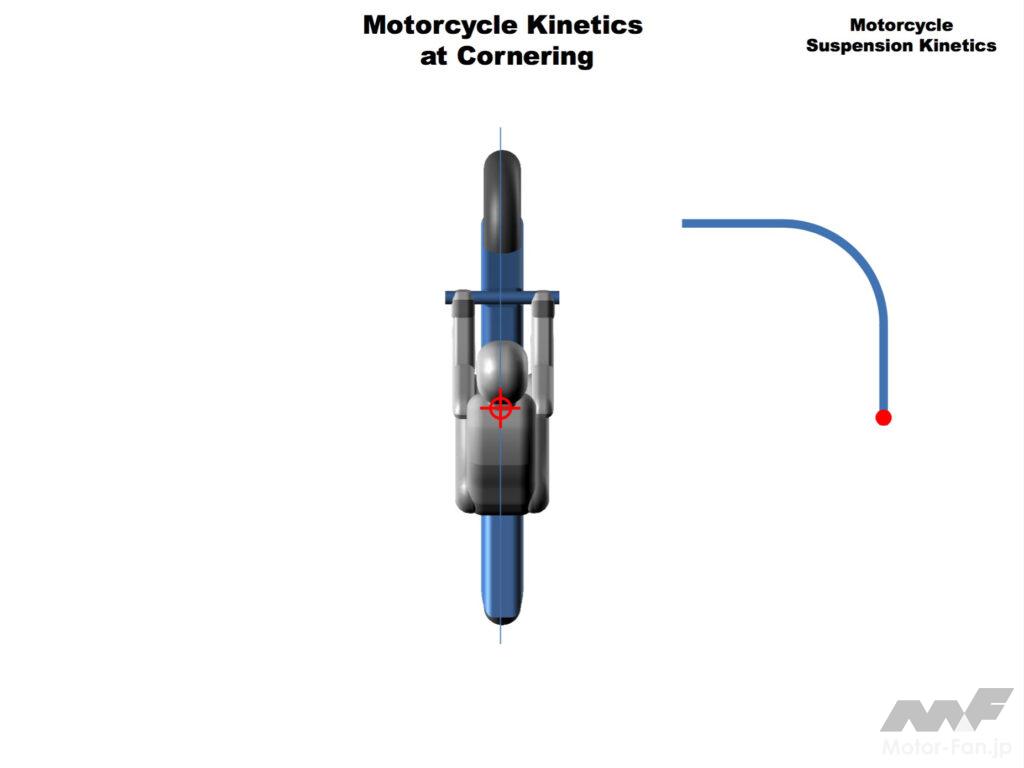
これからコーナーへの進入から脱出までその過程を分解して解説していきます。MCを上から見た図、上が進行方向です。図の右は左コーナーのMC位置を赤丸で示しています。
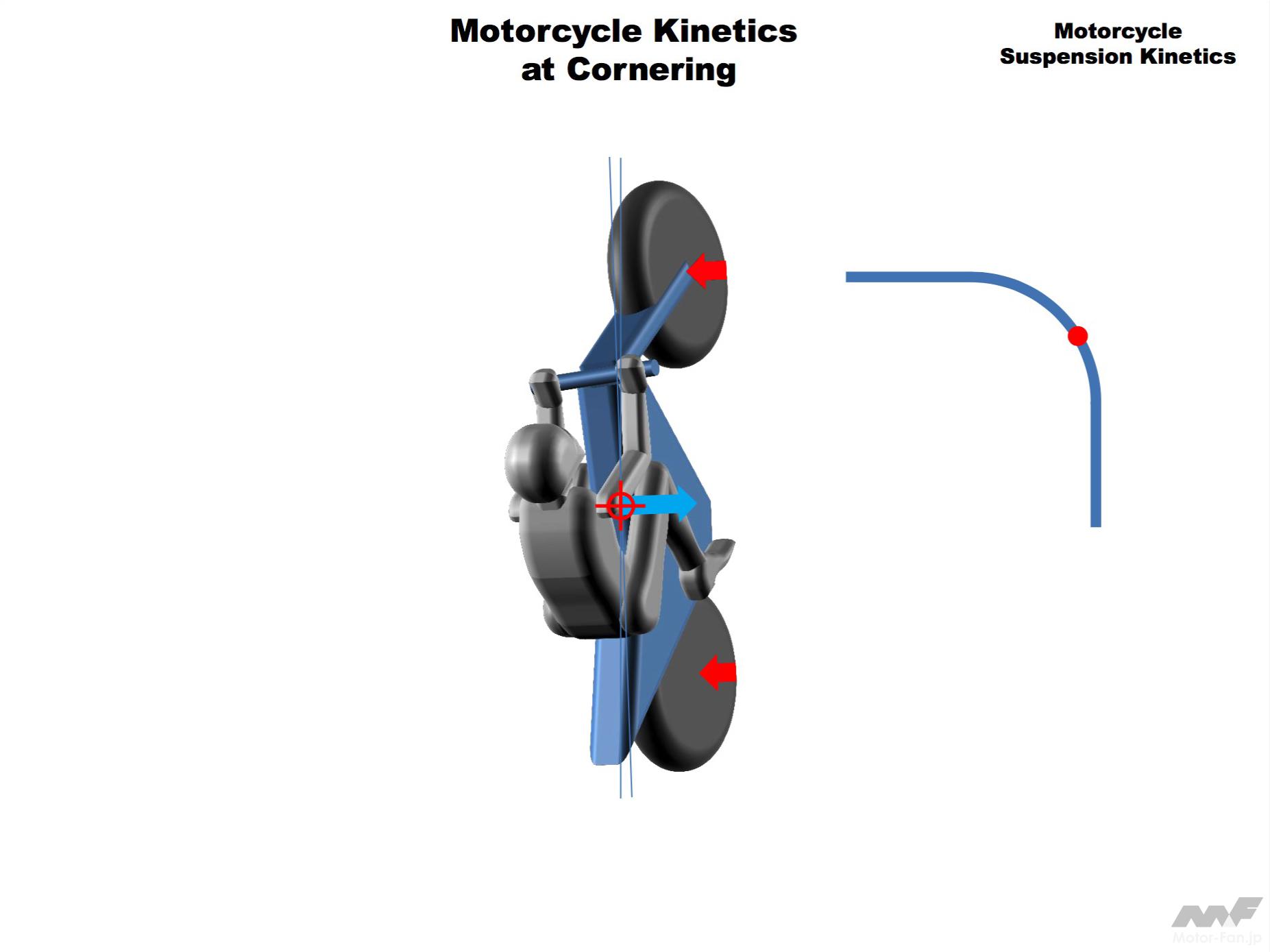
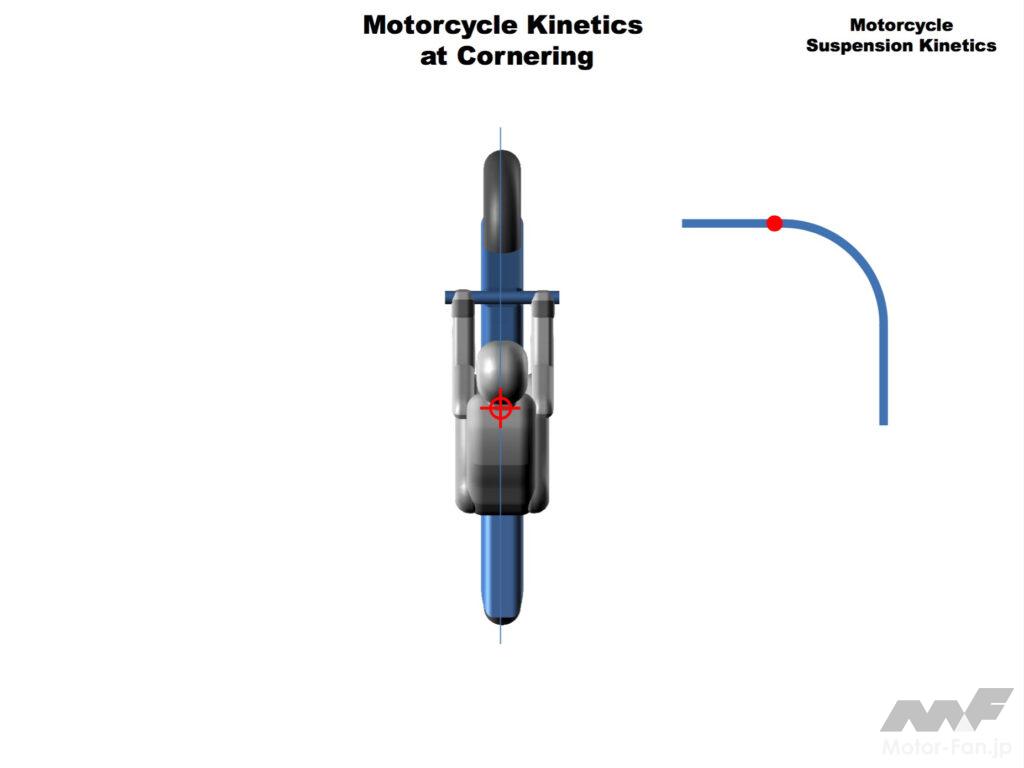
コーナーへの進入 ②
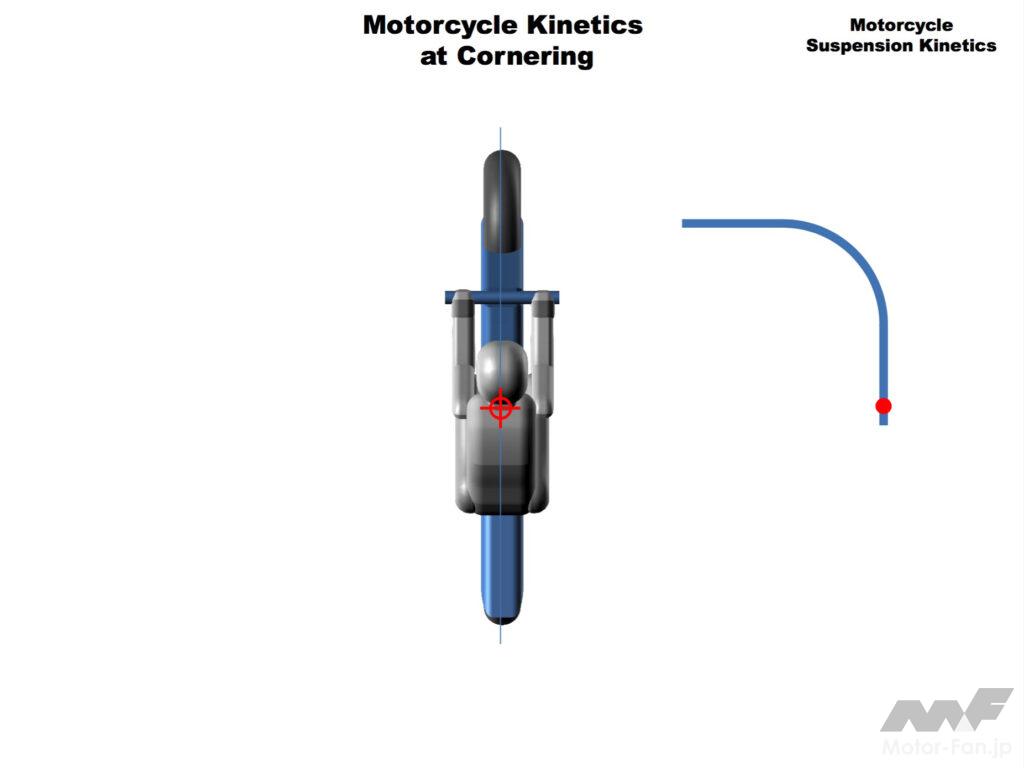
直進状態から…コーナーに向かって制動をかけながら…
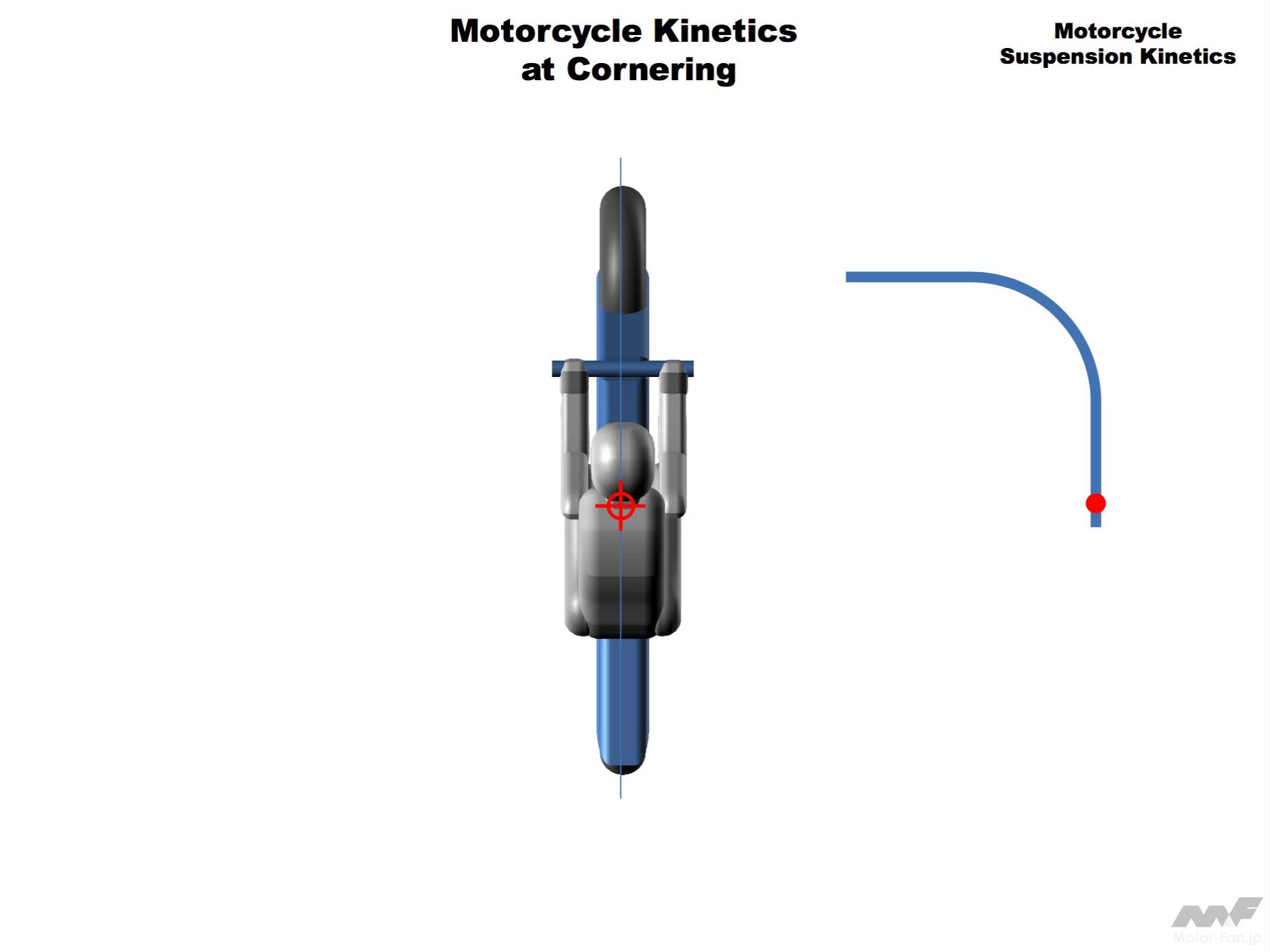
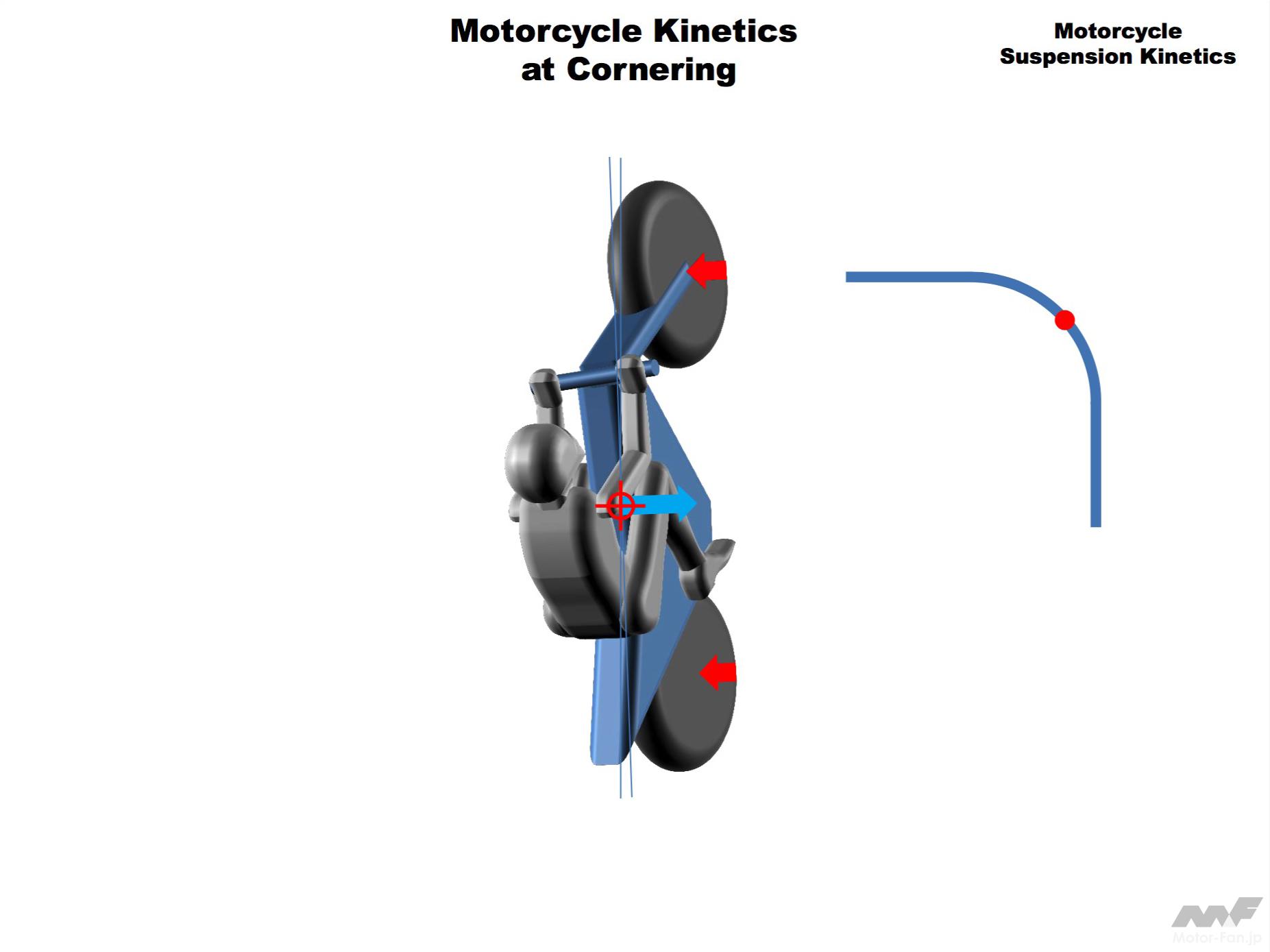
コーナーへの進入 ③
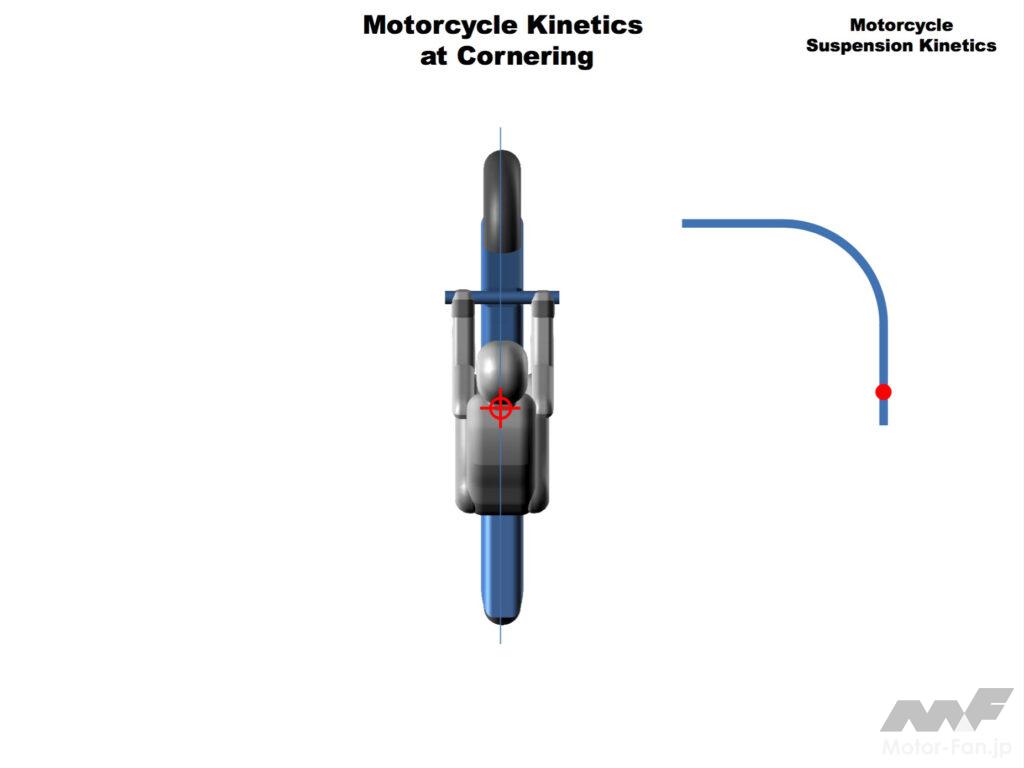
コーナーに進入し…
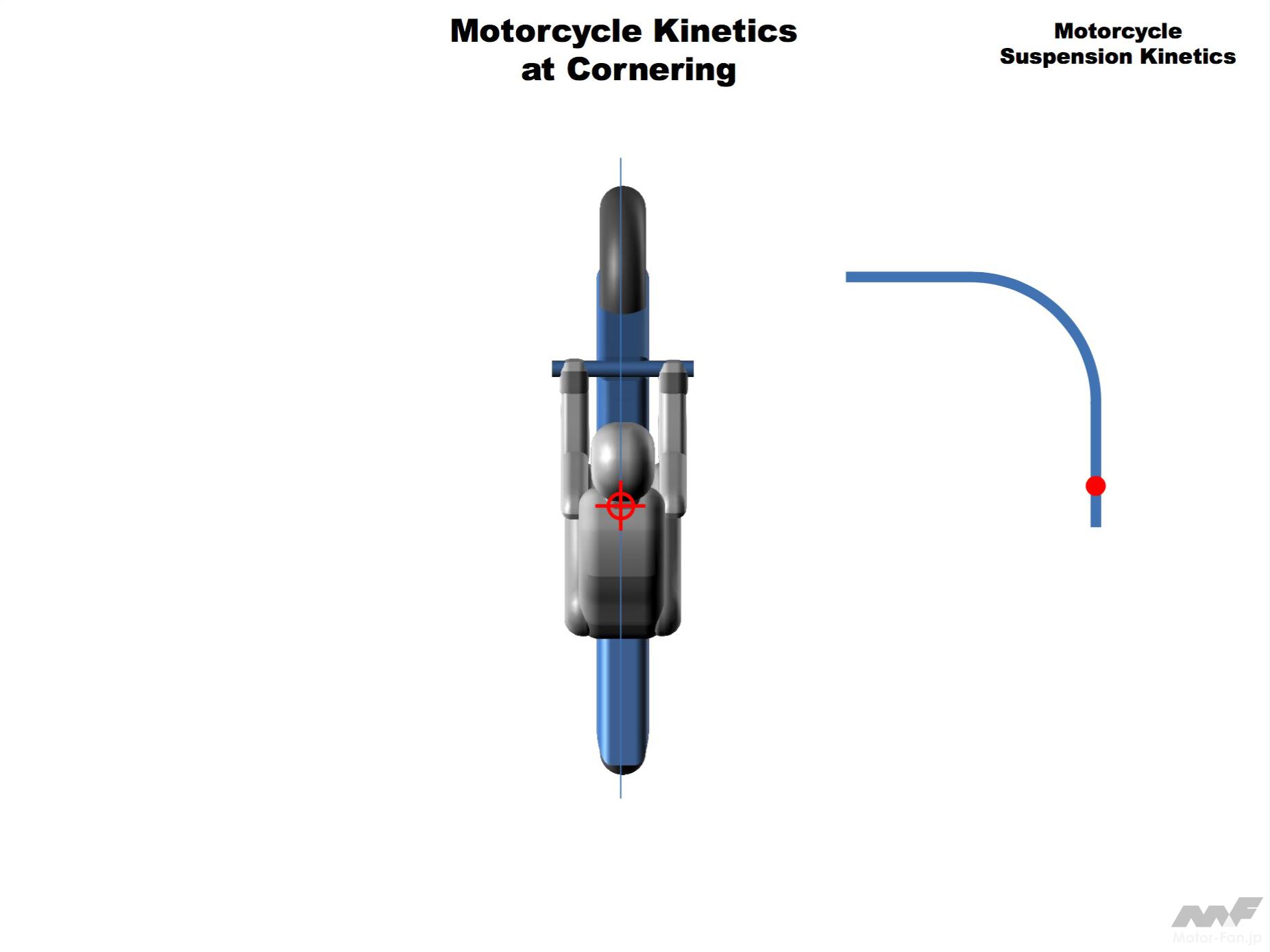
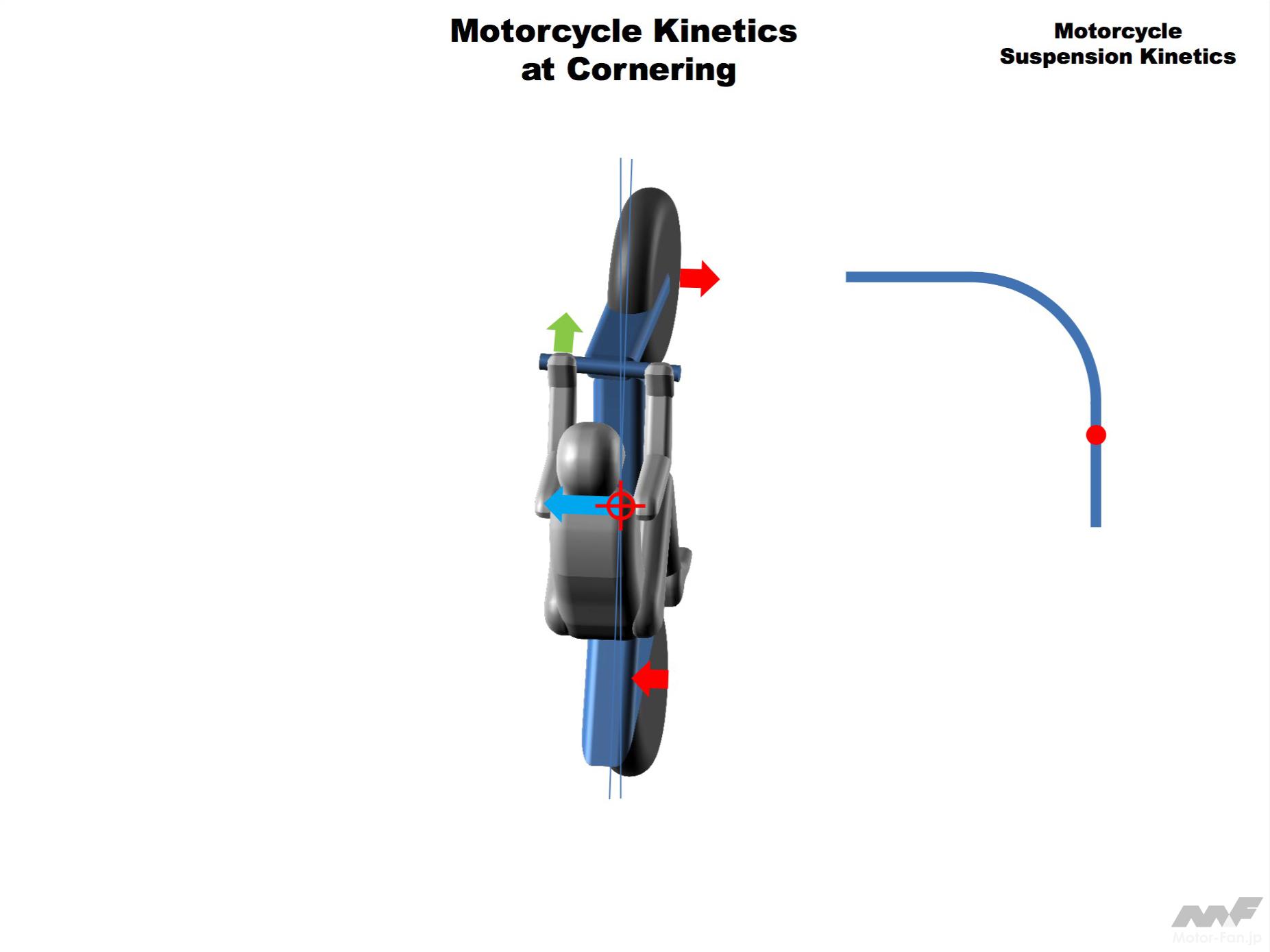
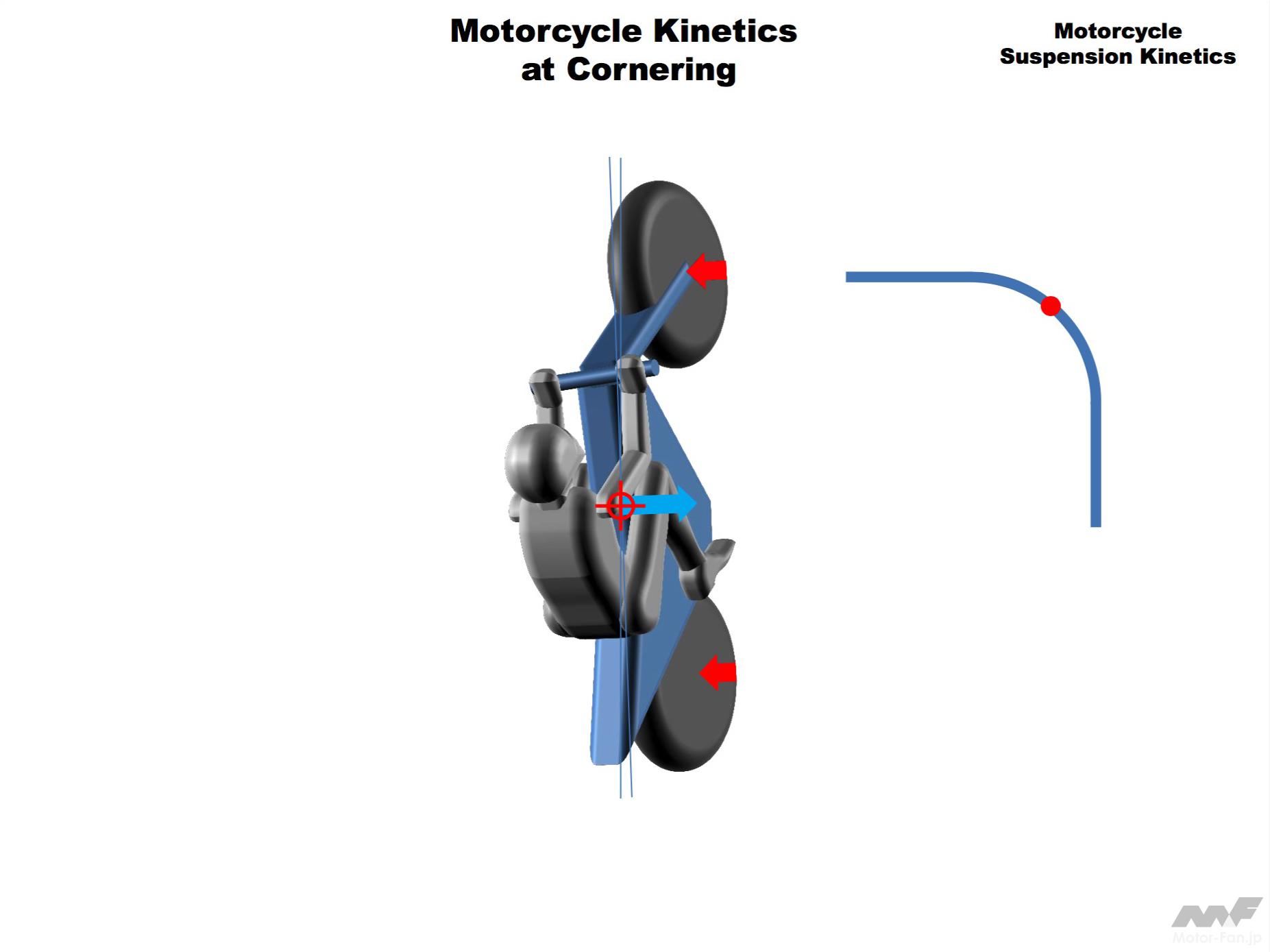
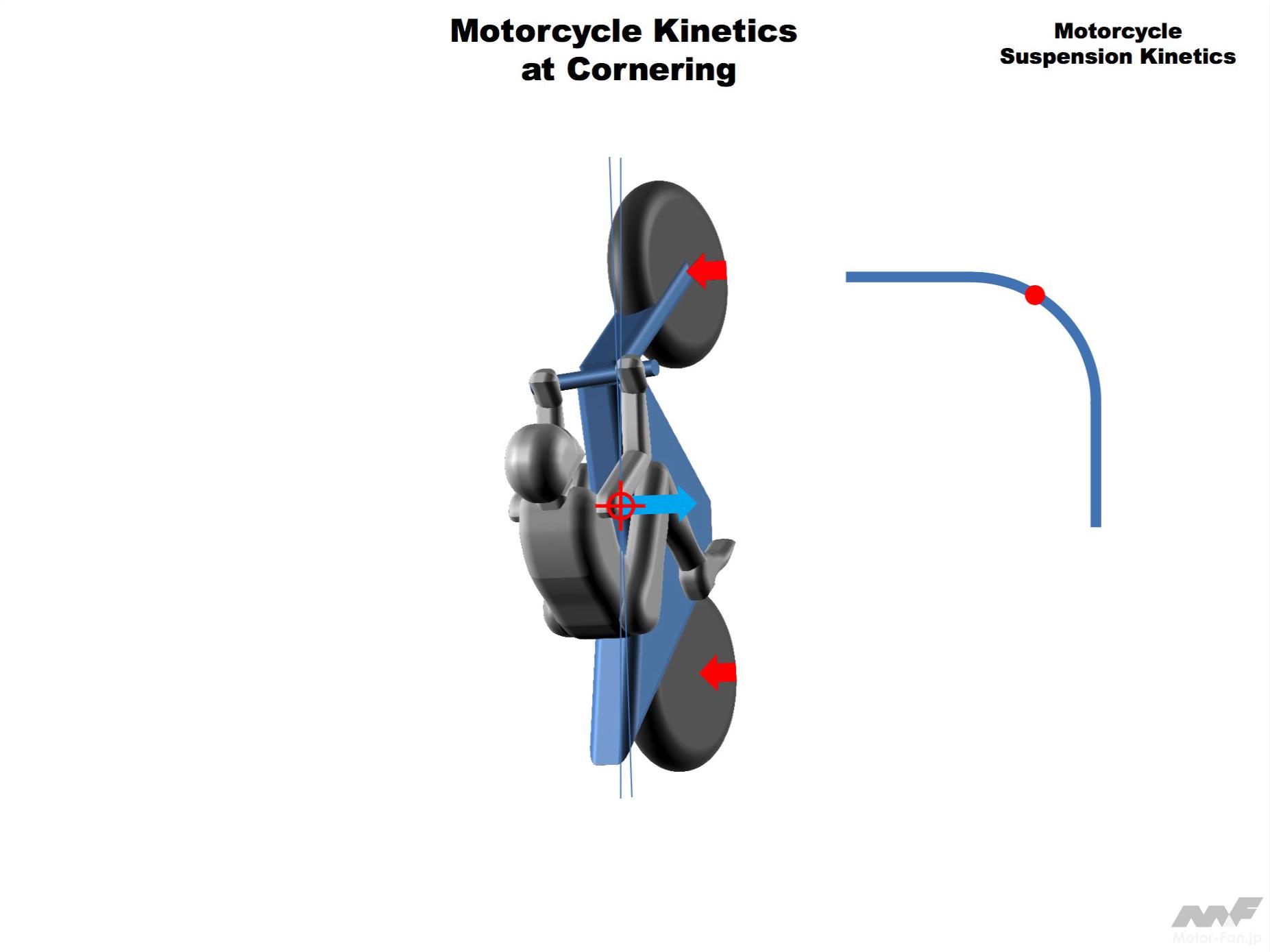
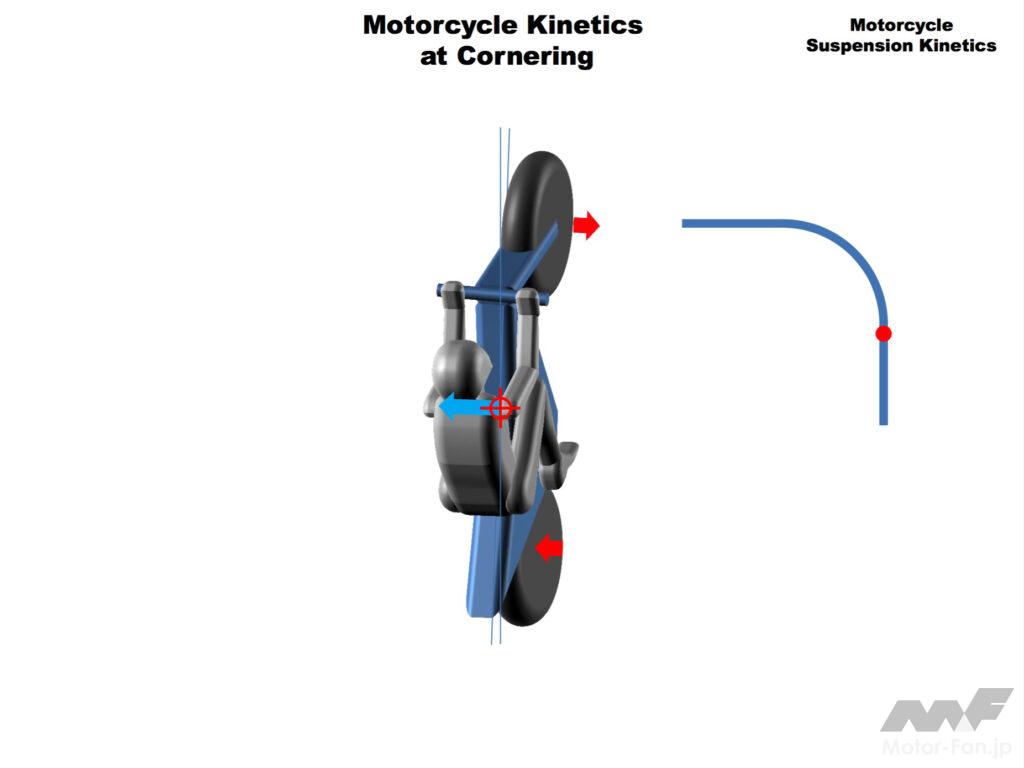
リーンに持ち込む ①
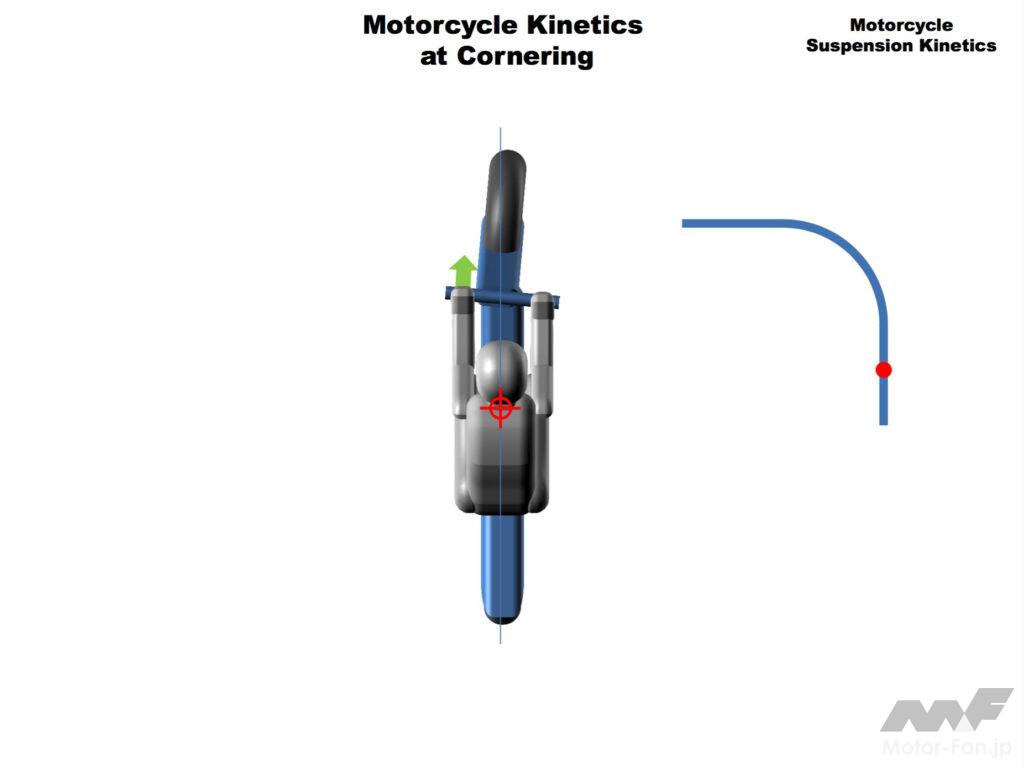
ハンドルを曲がりたい方向とは逆に、わずかに切ります(逆ステア)。ライダーのイメージとしてはハンドルを切るというより、旋回する側(イン側)のハンドルバーを「押す」感じです。
「体重移動」のつもりで体をイン側に倒す動作によって、実はイン側のハンドルバーをわずかに押しているのです。
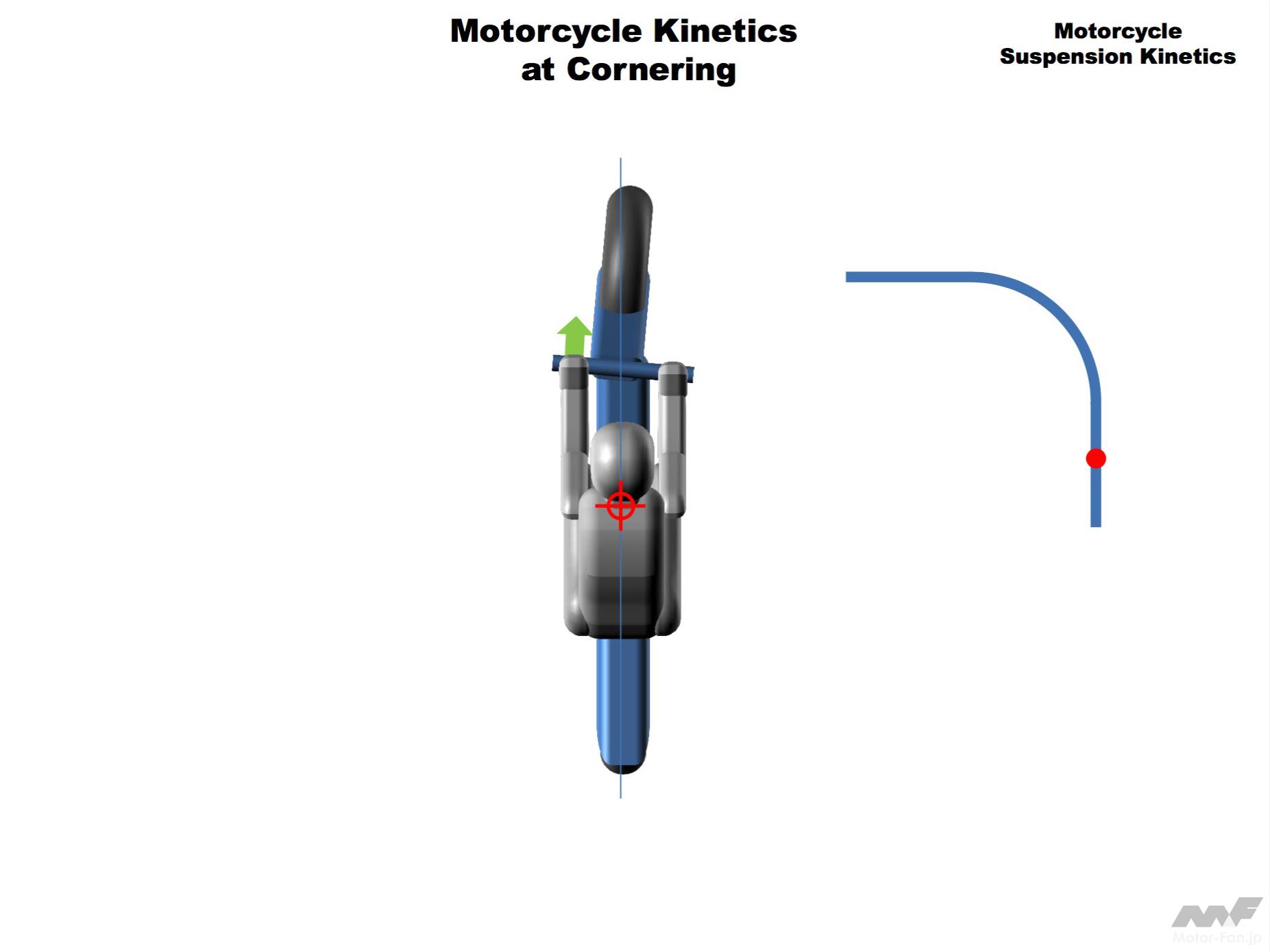
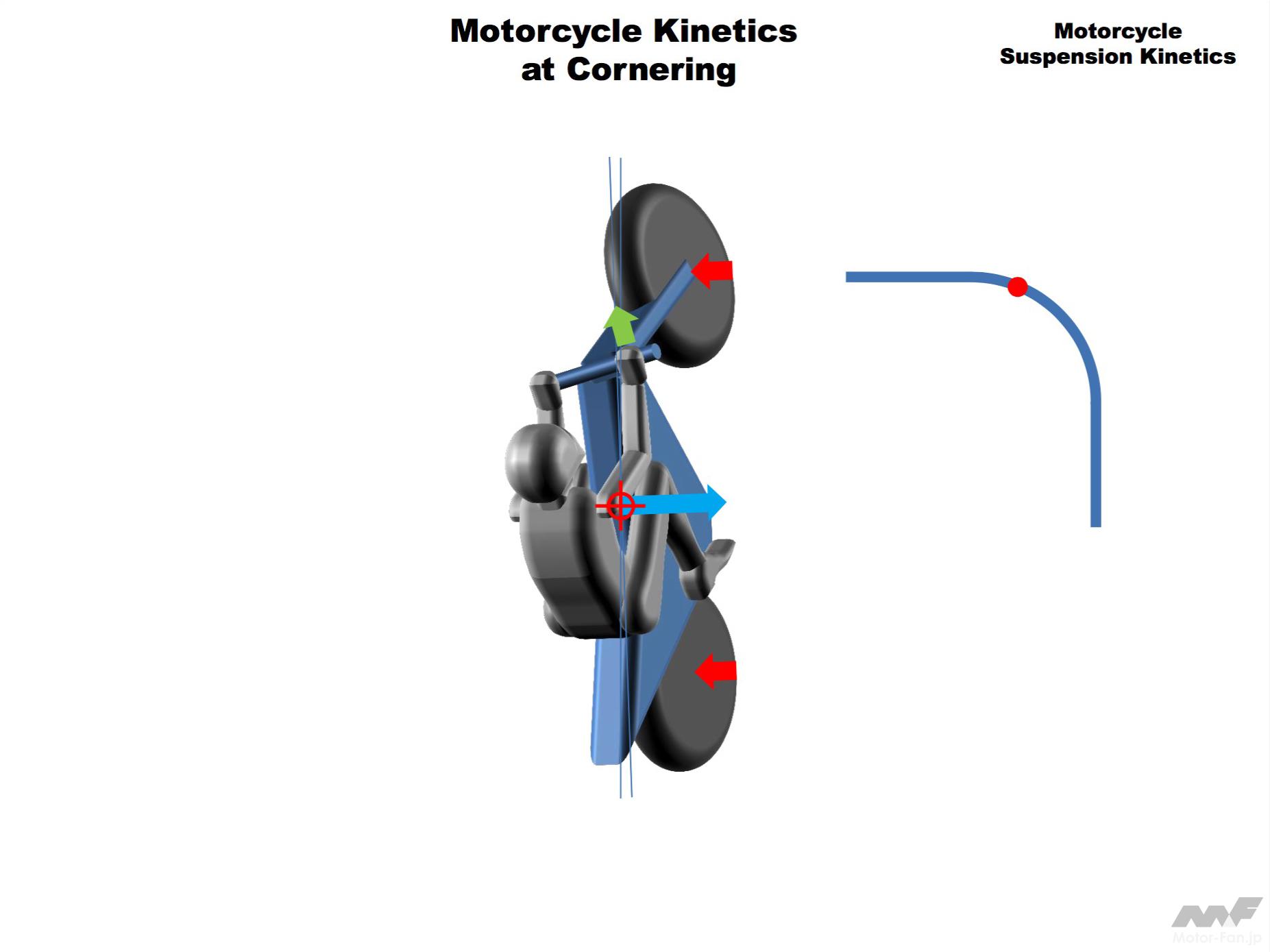
リーンに持ち込む ②
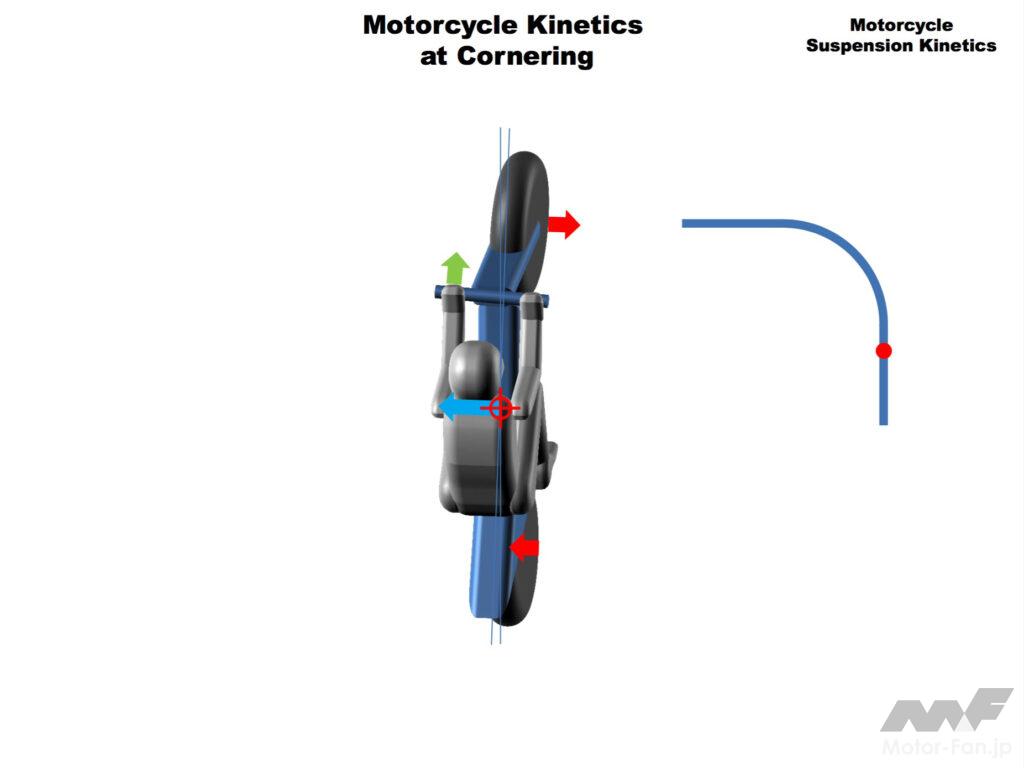
前輪にコーナリングフォースが発生するため、前輪が右に「足払い」されるように、バランスを崩して左に傾き始めます。
【ヒント:不安定なものの動き始め】 不安定な物体が動き始めるとき、まず最初に「バランスを崩す」ことがきっかけになります。一見矛盾するようですが動き出したい方向とは逆に荷重移動させてバランスを崩します。 人間も直立状態から歩き始めるとき、無意識に軸足(踏み出さないほうの足)の荷重点を足裏の中央から踵の方向に一瞬移動しています。歩くという無意識な動作ですが、一度ご自身がどうやっているのか確かめてください。「軸足のかかと荷重」が体感できると思います。 もっとわかりやすいのは体重計に乗って静止状態から体重が増える方向に針を動かすのにどうすればいいかという実験です。答えは少し体を屈めた状態から伸びあがることです。逆に踏ん張るように屈むと体重計の針は低い方に振れます。 MCはこれとは少し違いますが車体を傾けるとき旋回方向とは逆に一瞬逆ステアし旋回姿勢を作るというのはMCが元々不安定な乗り物だからです。 最近生産中止になったセグウェイという一軸の2輪車も、走り出しの体重移動は前ではなくて後です。ハンドルバーを押して車体を前方に傾けると前進するのですが、その反作用で実は体重は後方に移動します。走り出したら徐々に体重を前方にかけていきます。
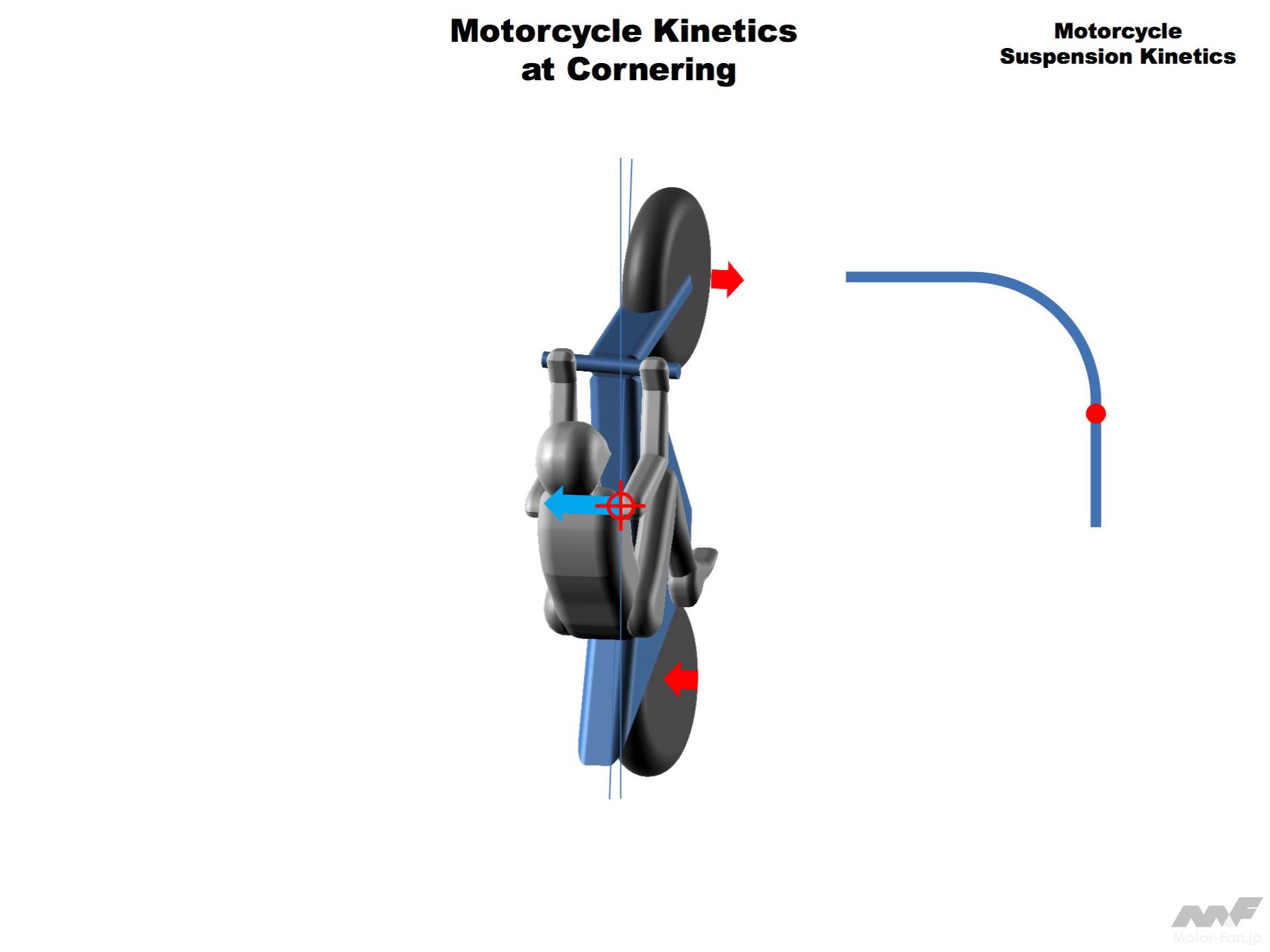
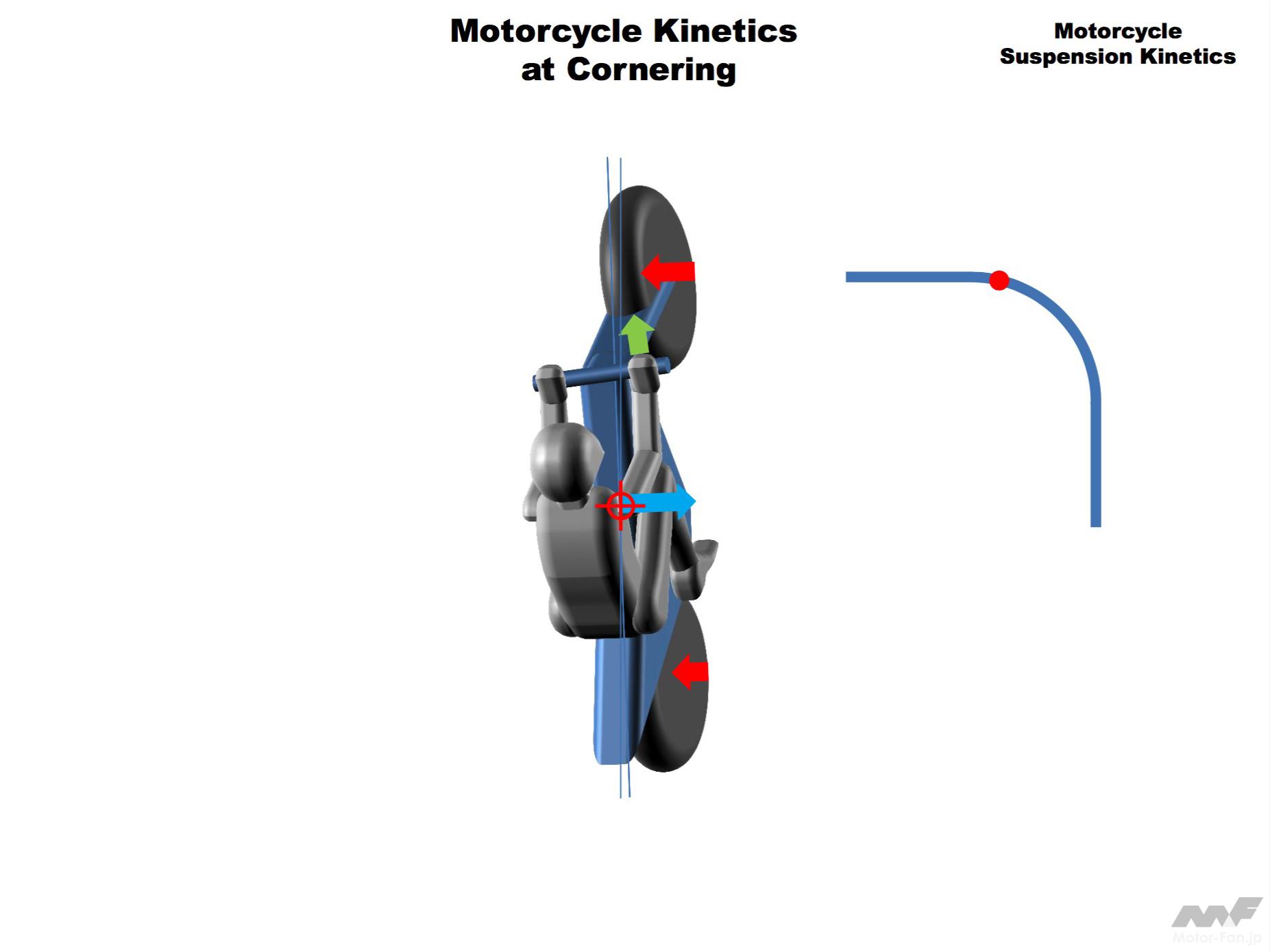
リーンに持ち込む ③
さらに傾きが強くなり、ライダーが右にステアしていた力を緩めると…
リーンに持ち込む ④
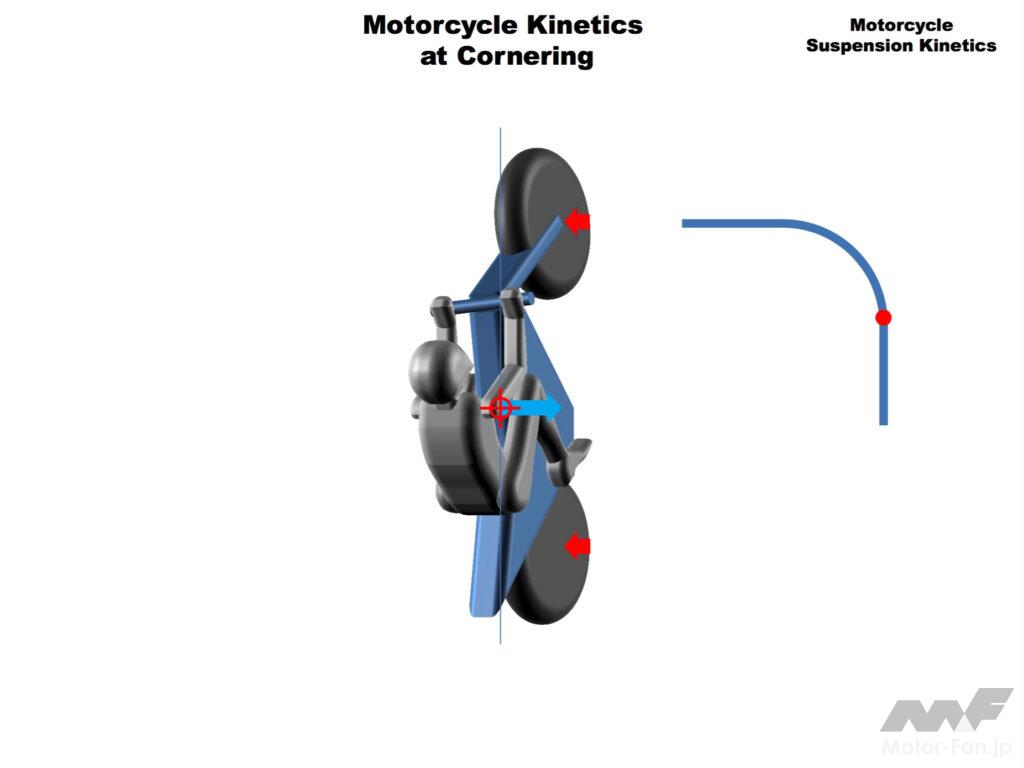
MCは傾きを増しながら、徐々にキャンバースラストで左旋回を始めます。
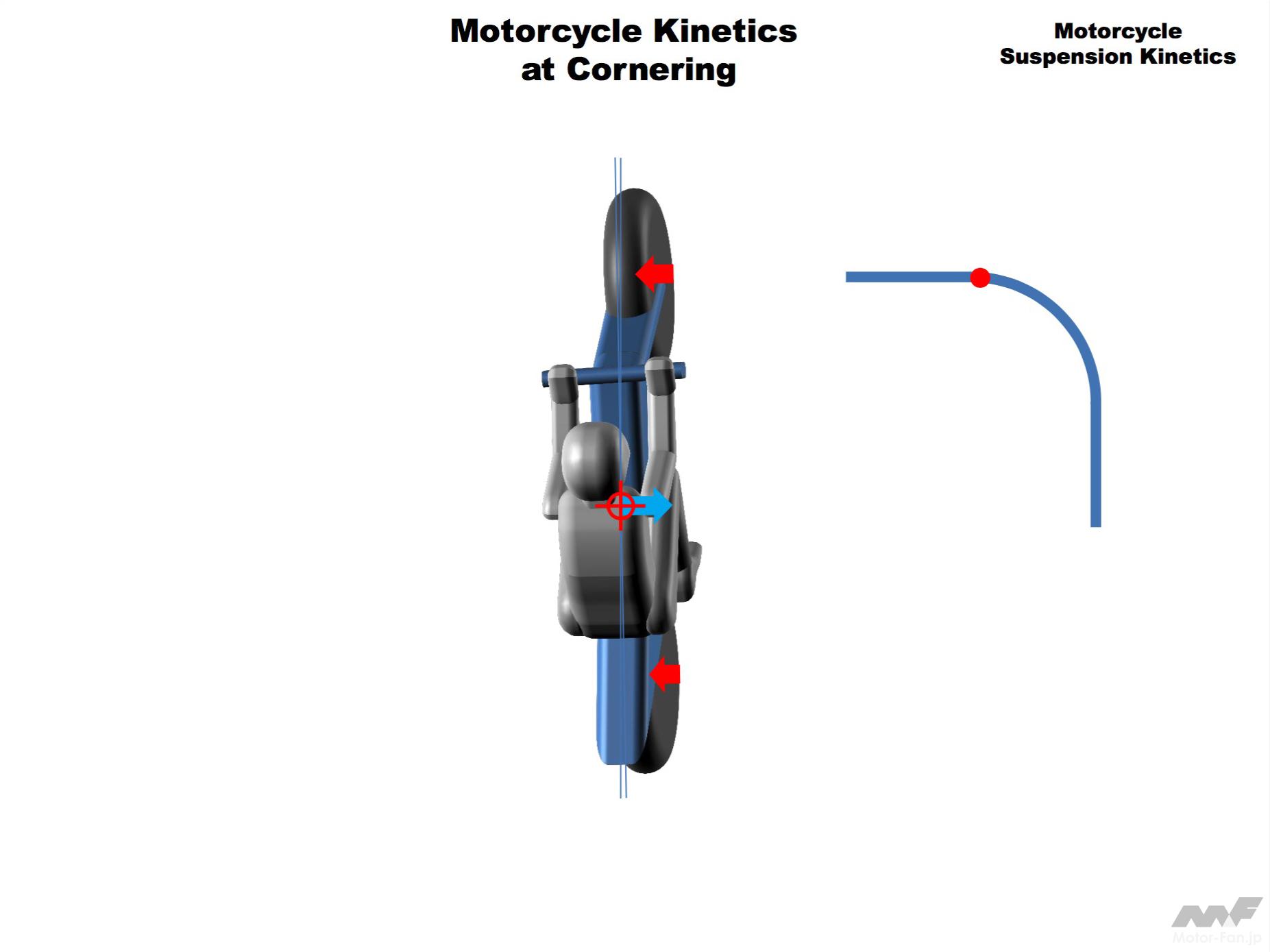
リーンによる定常旋回 ①
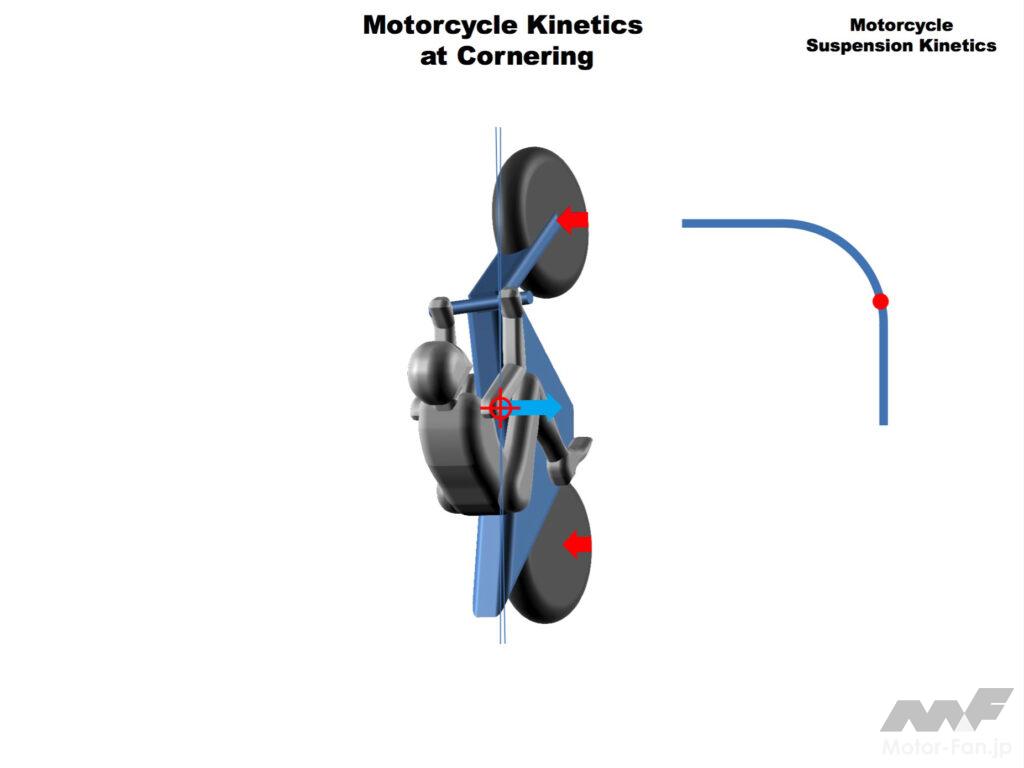
車体の傾斜と旋回横力が釣り合うまで車体は傾き、定常旋回に入ります。
リーンによる定常旋回 ②
この時、ハンドルは自然に左に切れています。これがセルフステア状態です。場合によってはライダーは心持ちステアリングであて舵(この場合は右に操舵)をしてバランスを保ちます。これもライダーは無意識にやっています。
そのMCの「個性」によってライダーがセルフステアで切れ込みやすいMCはあて舵を、ステアが戻りやすいMCは切り込む方向にステアトルクを与えて調整することもあります。
リーンによる定常旋回 ③
ここからコーナーの立ち上がりまで、リーン角と車体横すべり角とステア角で生じる前後タイヤの横力と慣性力(遠心力)が釣り合って定常円旋回します。
リーンによる定常旋回 ④
もちろんライダーの意思によって、よりイン側にまたはアウト側に旋回の軌跡を修正することも可能です。その場合もほぼ無意識にライダーはステア操作とスロットル操作でそれを行います。
リーンによる定常旋回 ⑤
よりタイトに曲がりたい場合は「スロットルを戻す」か「逆ステア」あるいは両方の操作で車体を倒し込み、緩やかに曲がりたい場合は「スロットルを開く」か「ステア角を増して」あるいは両方の操作で車体を起こします。ステアする方向は普通に考えると「逆じゃないの?」と思いますが実際そうしています。
リーンによる定常旋回 ⑥
ここからがコーナー脱出の手順です。
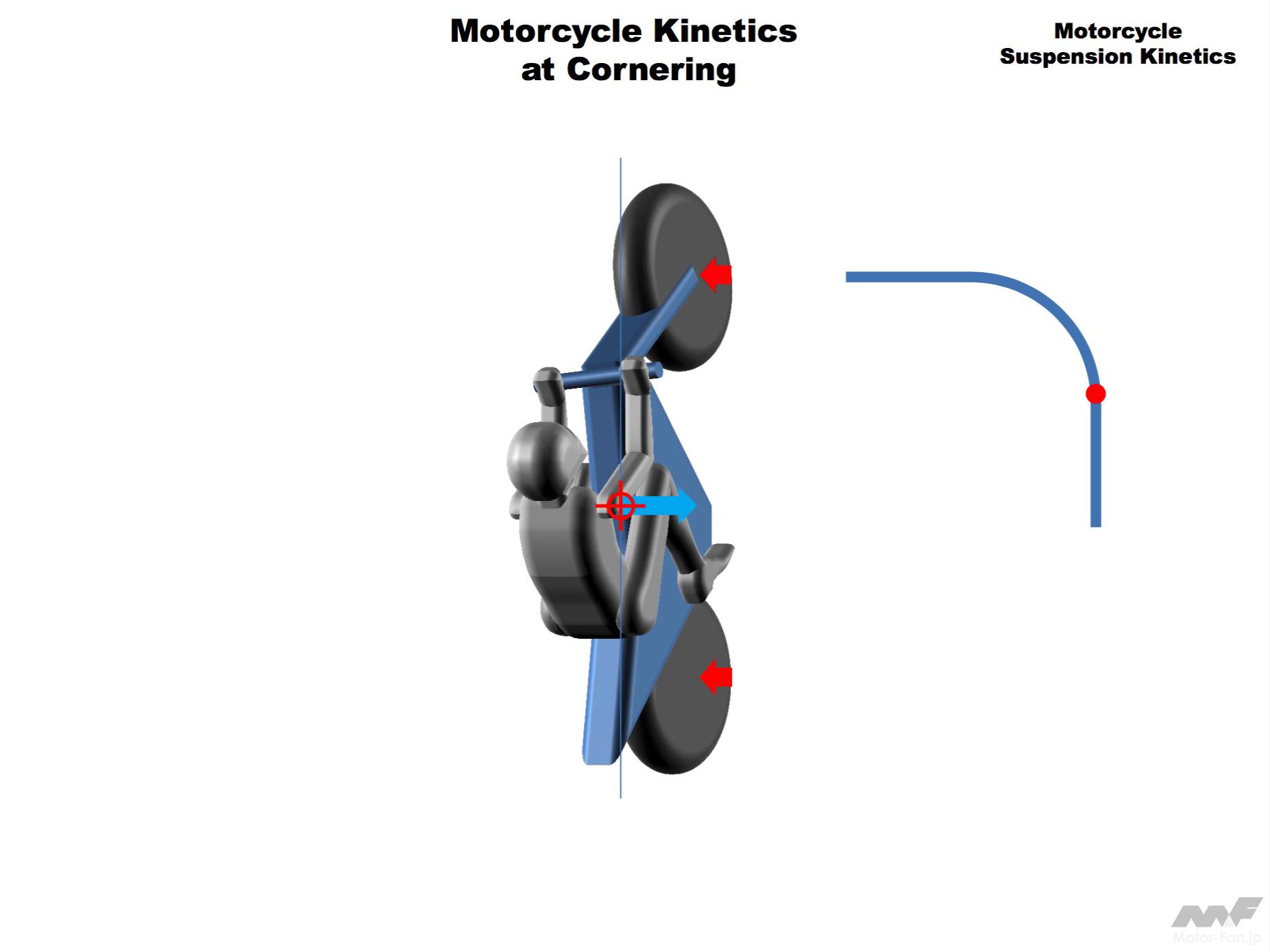
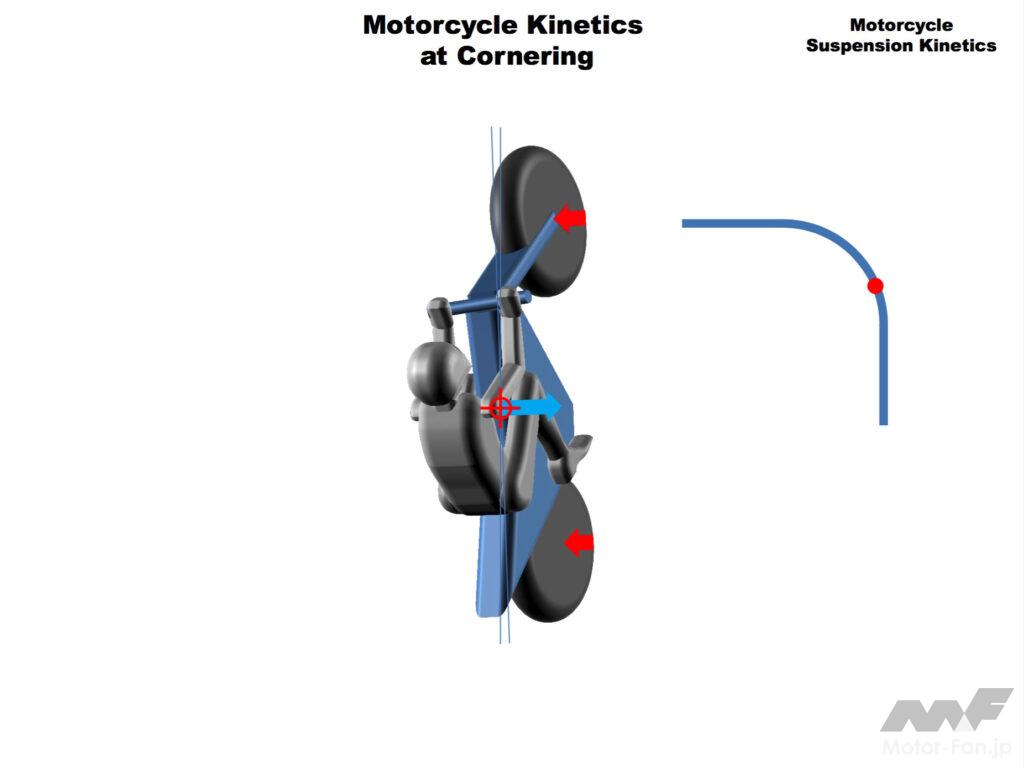
定常旋回からの離脱 ①
直進に戻す時は、ハンドルをわずかに切りこむことによりMCは起き上がります。これも旋回初期と同じように横力を増やして故意にバランスを崩しています。
同時にスロットルを開けて、速度を上げることによって慣性力(遠心力)を増加させることも必要です。
定常旋回からの離脱 ②
こうしてMCは徐々に起き上がりながら…
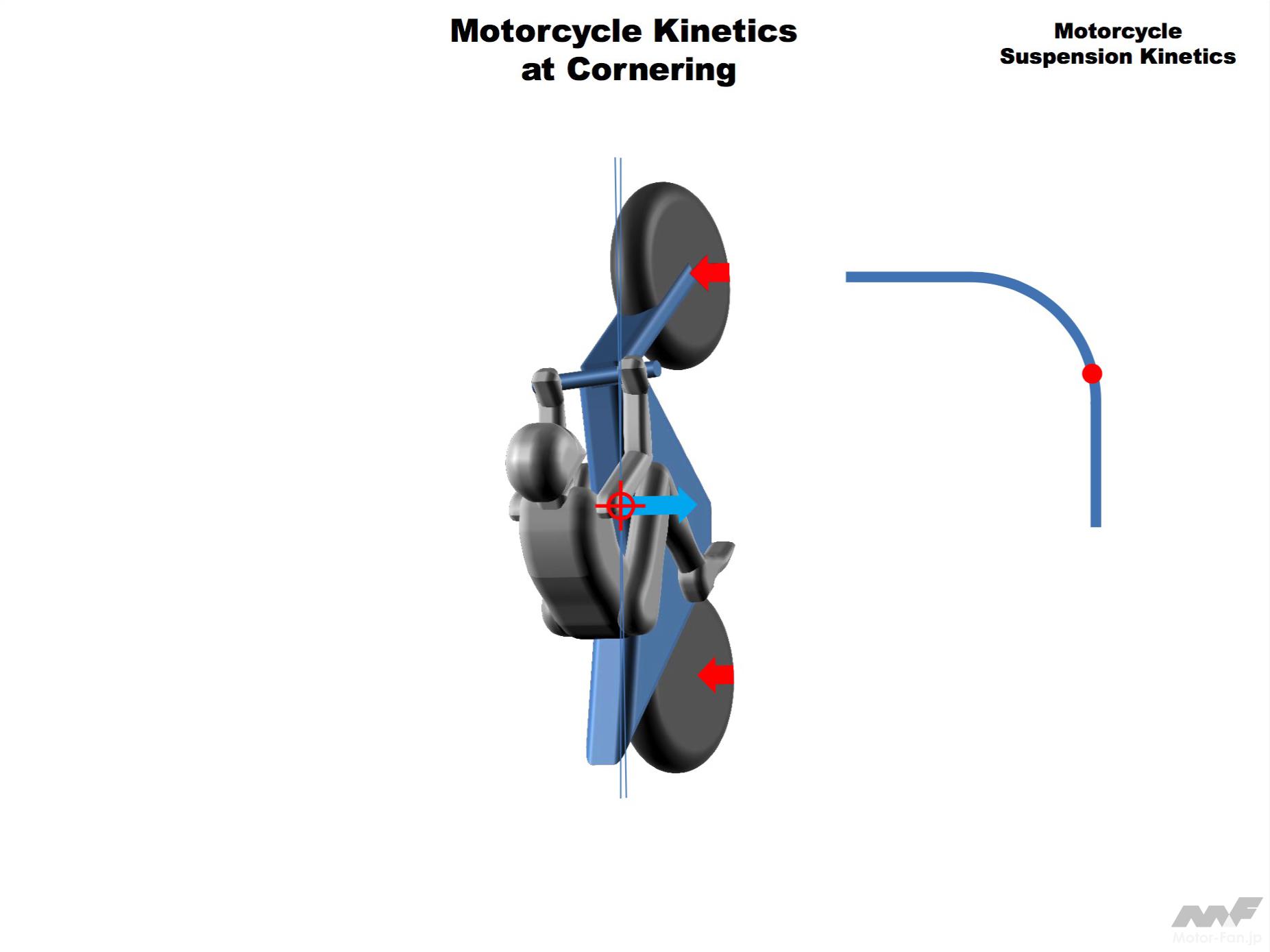
定常旋回からの離脱 ③
コーナーを加速しながら脱出します。
加速しながら直進走行 ①
重要なことは、MCはコーナーの入り口と出口で、曲がりたい方向とは逆のステアが必要だということです。
パラパラ動画
これは今までの解説をパラパラアニメにしたものです。コーナーの進入と脱出で逆にステアをしていることをご覧ください。どうでしょうか? イメージできましたか?
YAMAHA MOTOBOT ver.2
しかし、まだMCは体重移動で曲がっていると信じている方に、YAMAHAが2017年の東京モーターショーで公開した”MOTO BOT ver.2”を紹介しましょう。
これは簡単にいうと「ロボットが操縦するMC」です。通常のMCをロボットの形をしたアクチュエータが操作するわけです。
両腕でステアリングを操作し、右手でスロットルとフロントブレーキ、左手でクラッチ、右足でリヤブレーキ、左足でギヤシフトを行います。ロボット君の胴体はMCの車体にしっかりと固定されていて、ハングオンはおろか微小な体重移動すらできません。
以下にYAMAHAの広報映像のリンクがありますのでご覧ください。ちゃんとコーナリングしてます!
https://global.yamaha-motor.com/jp/design_technology/technology/motobot/past_initiatives/ep3/
少なくともこれで「体重移動しなくてもMCは旋回できる」とはいえます。しかし「逆ステアで旋回に入るのは邪道」「体重移動をした方がより上手く旋回できる」という反論はまだできます。
じつは筆者もMC歴はかなり長く、MCでワインディングロードを駆けるとき、コーナーでの「起承転結」がぴたりと決まった時、人車一体を感じた時の爽快感・至福感が堪らないというのはわかります。
だから、多くのライダーが「体重移動説」にこだわるのは十分理解できます。
まとめ~「体重移動伝説」の真実

これが「体重移動伝説」の発端です。ライダーの動作でMCが動き、コーナリングが決まったり決まらなかったりするという感覚をもとに、「腰を入れる」「ニーグリップ(タンクを膝で押す)」「ステップの踏み換え」など、さまざまな神話が派生的に生みだされてきたのです。
ではこの「感覚」と、いままで講義した「逆ステア」との関係を説明することはできるのでしょうか? 結論からいうとそれは可能です。
YAMAHA MOTOBOTと違い、MCとライダーはボルトで固定されているわけではなく、また人の体は多関節で質量のある軟体です。だからライダーが完全に体をMCと一体にすることは不可能です。そのためどうしてもライダーの体は遅れてMCに追従します。それを防ごうとガチガチに身を硬くしてMCにしがみついていたら、滑らかな操作すらできません。
その時、一番いいのは「MCの動きにわずかに先行してあらかじめ体を動かしておく」ことです。その時当然ながらニーグリップやステップの踏みかえ、腰や上体をイン側にずらしたりするわけです。
つまりMCの動きにライダーを一体化させるため、わずかに先行して体を移動させたり筋肉を固めて待ち構えておくという行為が、いつしか体を動かすことでMCが旋回を始めるという「原因と結果が逆のイメージ」を創り出していったのです。
ですから、ライダーが体を先行させるために一連の「体重移動のイメージ」を持つこと自体は、間違いではありません。その方が「MCがライダーに邪魔されず動ける」からです。
まだ腑に落ちない? うーん、先入観を捨てていただいて真っ白な状態でMCにまたがっていただくのが一番ですね。






