日立Astemo、快適な乗り心地を実現する6自由度車両姿勢制御技術を開発
2023.10.26 12:00
日立Astemoは、自動運転車両特有の乗り心地を損なう課題を克服し、快適な乗り心地を可能とする、6自由度車両姿勢制御を可能とする技術のプロトタイプを開発した。走行時の車両の姿勢変化により乗員に不快感を与える揺れ抑制する姿勢制御技術を組み合わせ、自動運転車両の旋回や加減速に対し最適な姿勢制御を実現する.。
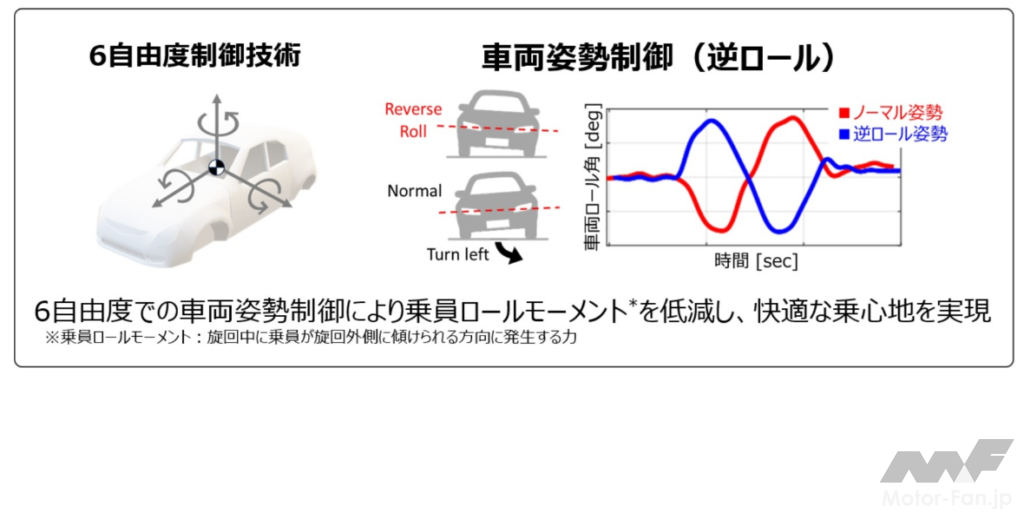
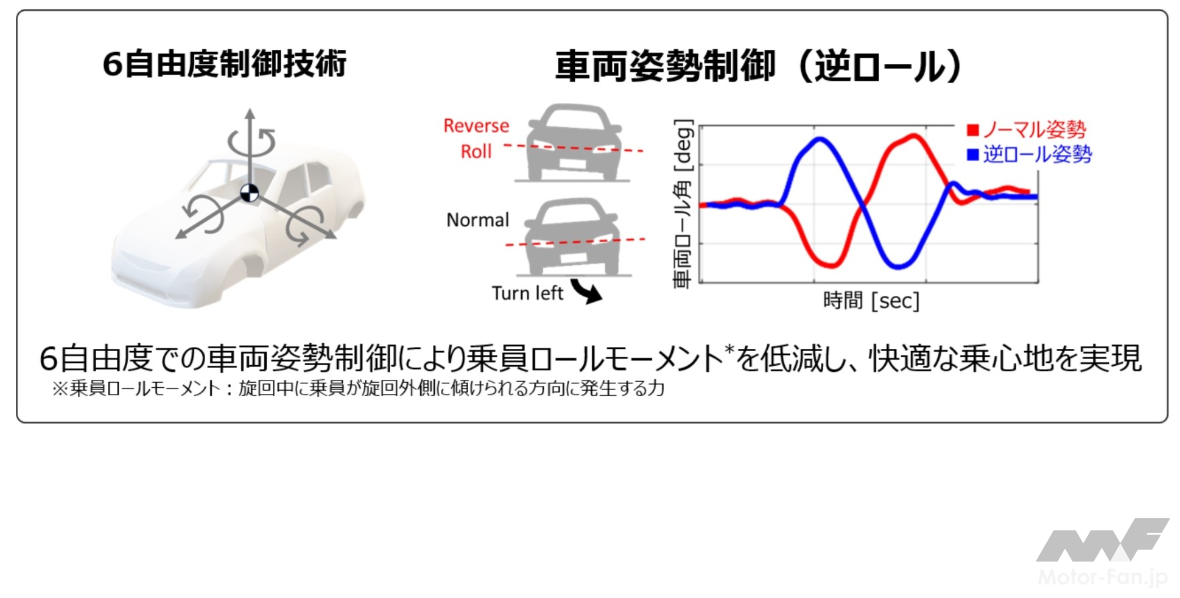
日立Astemoではこれまで、自動運転車両や先進運転支援技術による走行における不快な揺れや加速度を最小化するための高精度な軌道計画技術である「Dynamics planning (ダイナミクス・プランニング)」を開発してきた。この度、日立Astemoではさらに、6自由度車両姿勢制御技術を発表。6自由度車両姿勢とは、車両走行時における前後、左右、上下方向における回転及び加速度運動のことをいう。
自動運転車両は、渋滞の解消・緩和や高齢者などの交通弱者の移動支援といった社会的な課題解決手段の一つとしてニーズが高まっている。今後普及が見込まれるレベル4以降の自動運転車両の場合、要求ニーズも高度化し、自宅のリビングのような居心地を感じることができる快適さが期待されている。人間が車両を運転する場合、乗員の数や道路の曲がり具合などに応じて、極力乗員に不快となる加速度や揺れを感じさせないように操縦し走行することができるが、自動運転車両による走行の場合、ぶつからない運転が最優先されるため、急なハンドル操作や減速などにつながり、それが乗員にとって不快となる揺れや加速度を伴い、乗り物酔いを引き起こすなど、乗り心地の面では課題が残っていた。
本技術により、例えば、自動運転車両が右に旋回する際、左方向に加速度が働き、車両の左側が下に沈むロールと呼ばれる傾きが発生する際、乗員が不快に感じることが無いよう、逆方向にロールさせる車両姿勢を作ることで乗員にかかる加速度を低減し、自宅のリビングのような快適な乗り心地が実現される。