







目次
オープンスポーツの世界を確立したロードスターしかり、ロータリーエンジン搭載のRX-7しかり、トヨタや日産などの大手に対して個性と先進性で勝負し続けたマツダ。ここでは、そんな同メーカーがバブル期に生み出した革新的な4つの技術を紹介していこう。
●レシプロのV型12気筒に匹敵する3ローターエンジン
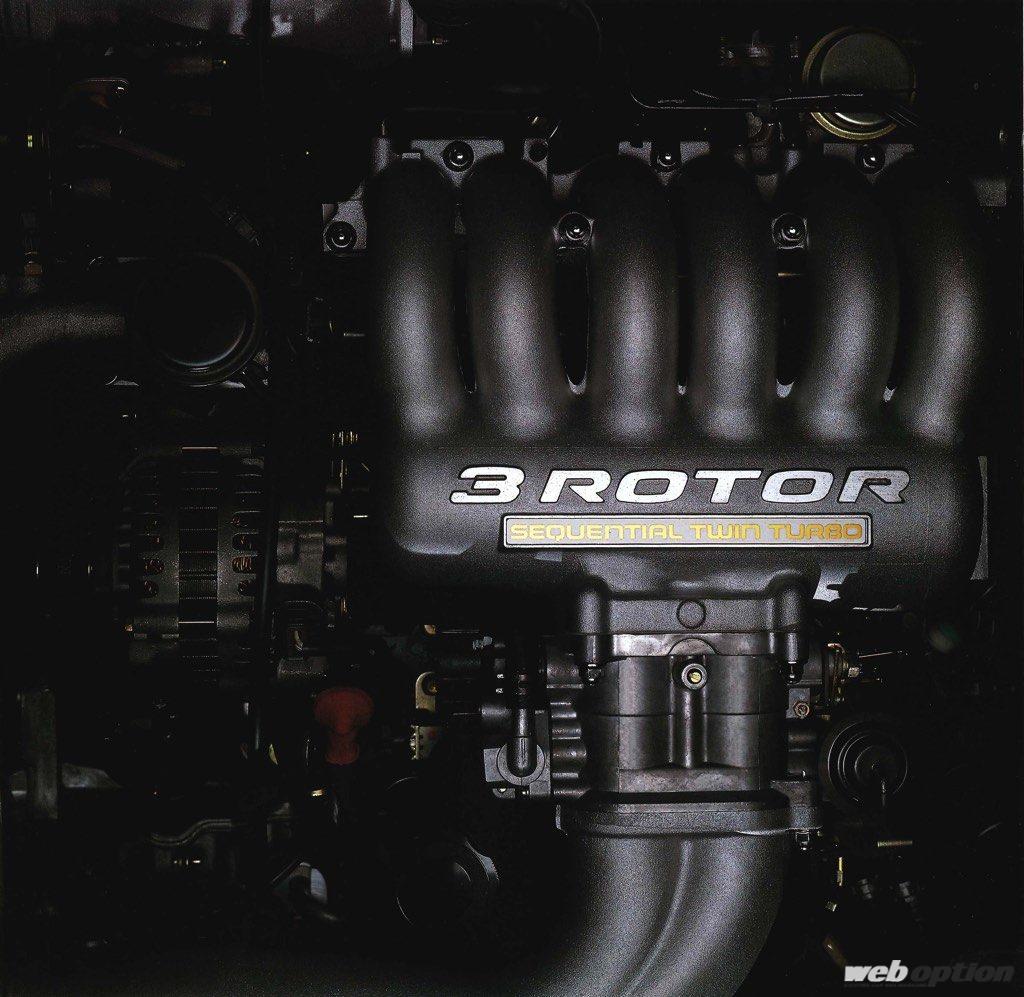
マツダにしかできなかった偉業中の偉業。バブル期に限って話をすれば、その頂点を極めるのは20B-REW型3ローターエンジンに尽きる。そもそも、ロータリーエンジンを量産市販化できたメーカーは世界中でマツダだけ。そう考えれば2ローターでも称賛に値するが、さらに上を行く3ローターエンジンを開発し、コスモに搭載してしまったのだから、もう凄い!としか言いようがない。
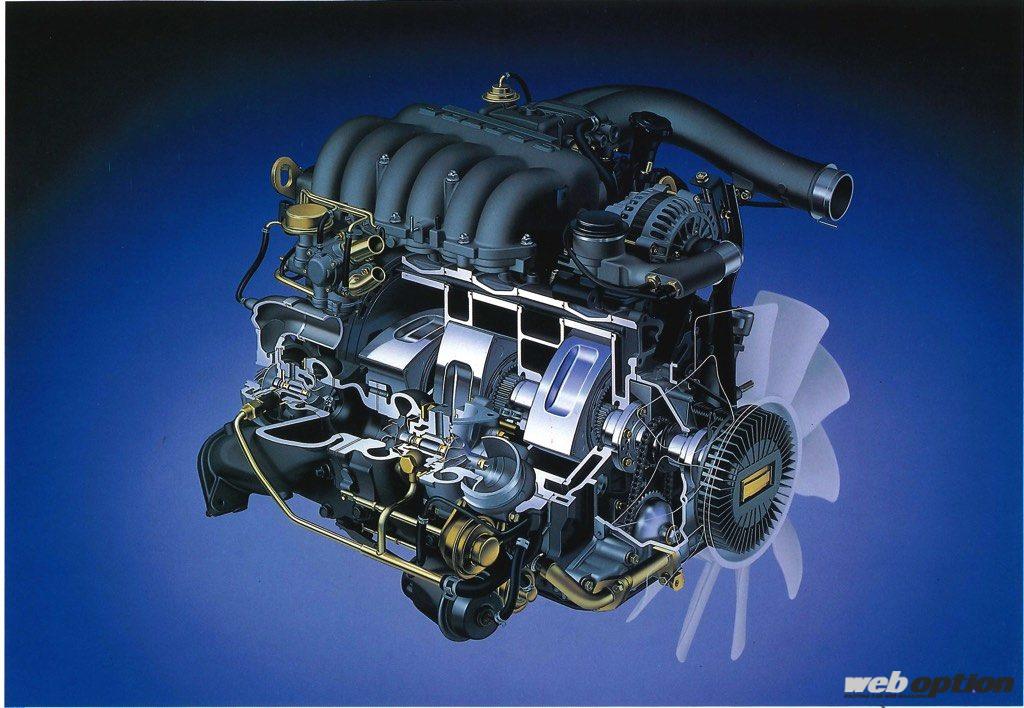
20B-REWという型式を持つこのエンジンは、13B型にもうひとつローターを追加したもの。排気量は654cc×3となり、シーケンシャルツインターボやトリプルモードデュアルエキゾーストなども採用され、当時の国産エンジンでトップレベルとなる280ps/6500rpm、41.0kgm/3000rpmを誇った。
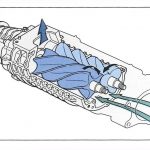
構造面での注目は2分割エキセントリックシャフトで、結合面が広く信頼性の高いテーパー継手方式を採用。レシプロに対し振動面で有利なロータリーエンジンだが、3ローターはレシプロのV型12気筒に匹敵するという滑らかなフィーリングも特徴だった。
実はこの20B-REWには整備解説書が存在せず、重整備を伴うメンテナンスが必要な際は広島のマツダ本社に送って対応してもらう…ということだったらしい。つまり、「マツダ以外、触るべからず」というスタンスからして、いかに特殊なエンジンだったかが分かるというものだ。もっとも、ロータリー系のチューナーは慣れ親しんだ13Bと同じ要領で自らの手で分解、チューニングしていたのだが…。
●量産型シーケンシャルツインターボの始祖!
ユーノスコスモが搭載する20B-REWと13B-REWで初めて採用されたのが、量産車では世界初となるシーケンシャルツインターボ。これは2基の小型ターボチャージャーを備え、低回転域ではプライマリータービンのみ、中高回転域ではさらにセカンダリータービンも稼働させることで、全回転域におけるパワー&トルク特性とレスポンスの向上を図るものだ。
タービンは日立製でプライマリーにHT15、セカンダリーにHT12を使用。風量的にはほぼ同等だが、低速域を担当するHT15は11枚のインパクト型ブレードでレスポンスを重視し、中高速域で稼働するHT12は9枚のハイフロー型ブレードで過給効率を高めるなど特性が変えられている。
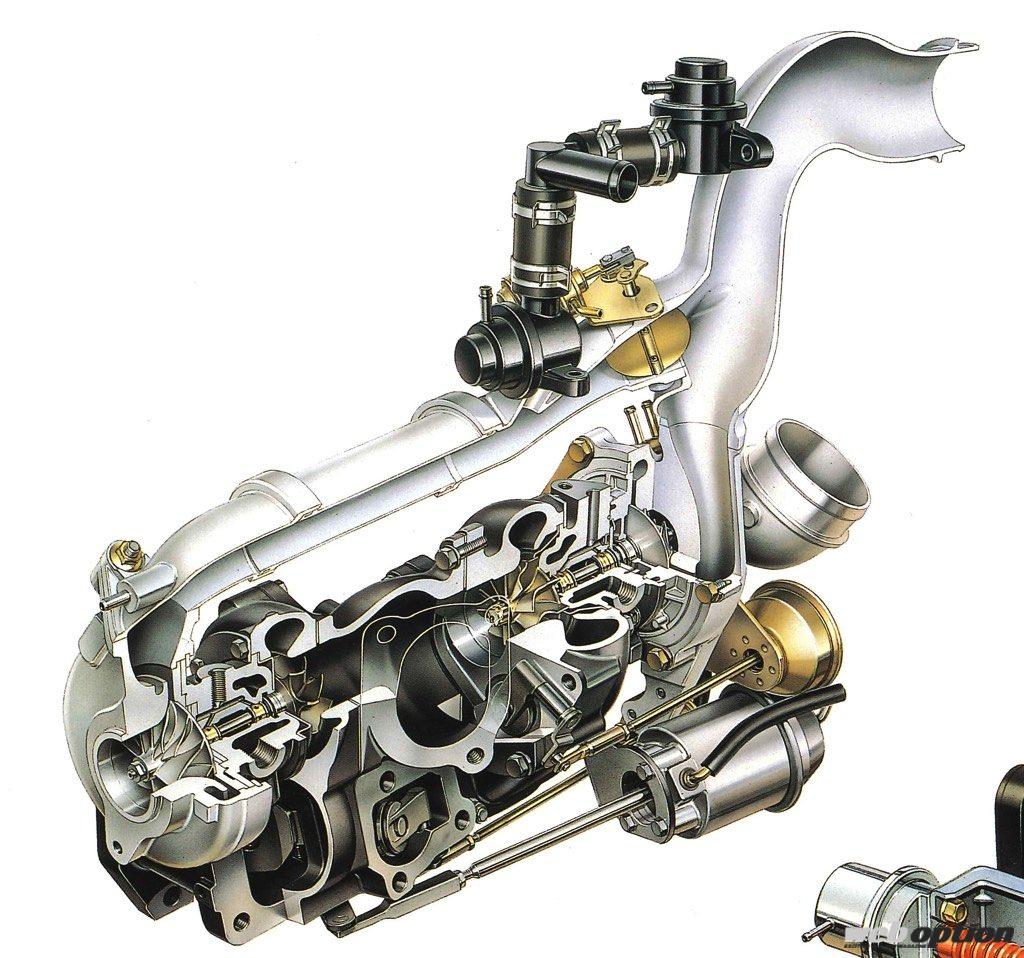
シーケンシャルツインターボで難しいのは、タービン1基での過給から2基での過給への切り替え。それがうまくいかないと、特定の回転域でトルクが急激に落ち込んでしまうのだが、マツダはプライマリー過給時にセカンダリーも助走させておく予回転方式でスムーズな切り替えを実現していた。
後、マツダに続き他メーカーもシーケンシャルツインターボを採用。トヨタ2JZやスバルEJ20が、その例だ。
●世界初の市販ミラーサイクルエンジン「KJ-ZEM」
「十年基準」をうたったユーノス800で、最も注目したいのが2.3L V6のKJ-ZEM型エンジン。圧縮比に対して膨張比を大きくするミラーサイクルを世界で初めて市販車用エンジンに採り入れ、大排気量ならではのゆとりある走りと小排気量の低燃費を両立するという、まさに来たるべき時代を見据えた意欲的なエンジンだった。
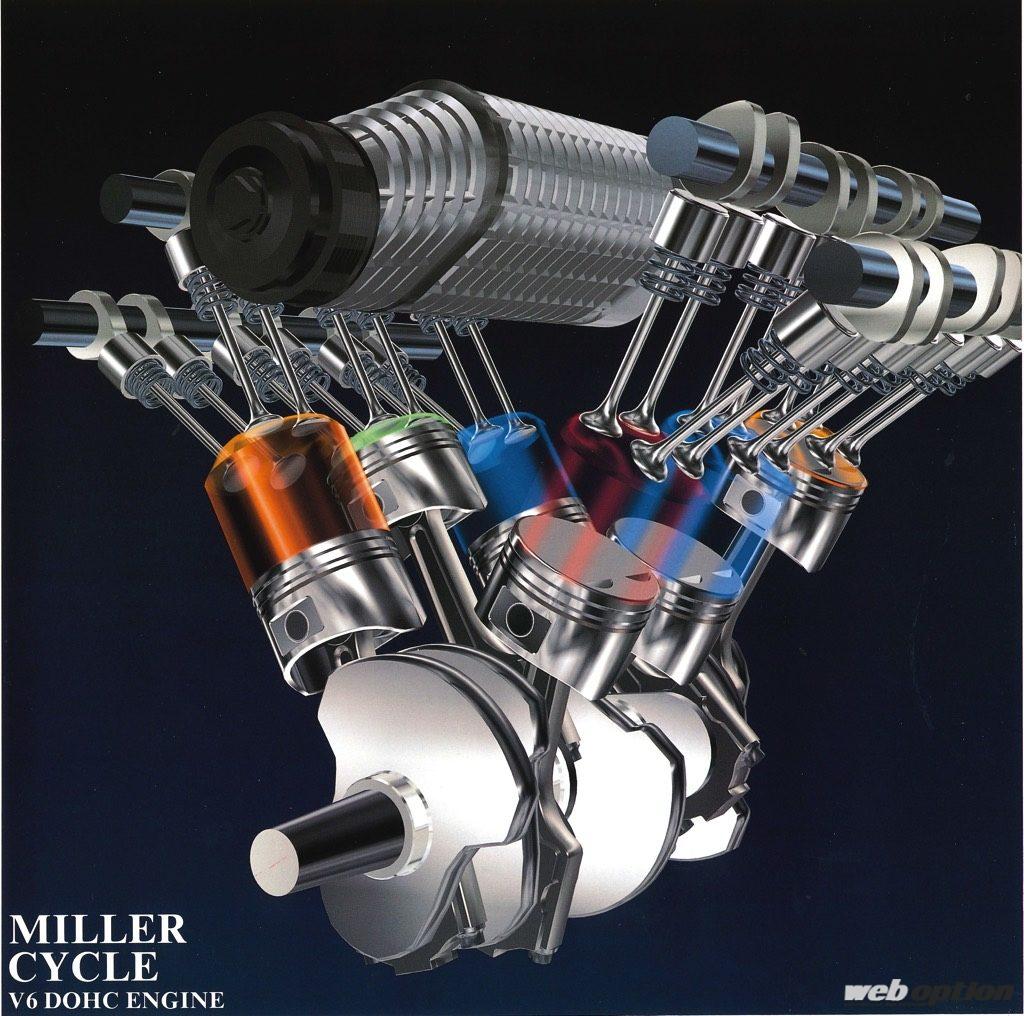
KJ-ZEM型は吸気バルブの遅閉じにより、低圧縮比と高膨張比を同時に実現。そのメリットは、高膨張比によって熱効率(=パワーや燃費)を悪化させることなく、吸気量を補うために雄ローターと雌ローターの回転によって空気を圧縮し、排気量の約1.5倍に相当する3.3L分の空気をシリンダーに送り込むIHI製リショルムコンプレッサーで過給しても低圧縮比だからノッキングを回避できる…という点にある。排気量2.3Lで、3.0Lクラスの走りと2.0Lクラスの燃費を両立していたのは画期的だった。

ちなみに、ミラーサイクルは初代プリウス(1NZ-FXE型エンジン)にも採用されたが、その登場は1997年。つまり、マツダはトヨタよりも3年早く、ミラーサイクルの技術を市販車に投入していたことになる。
ユーノス800(と、後のミレーニア)にしか搭載されなかったこともあって認知度は今ひとつだが、レシプロエンジンの歴史に刻まれる革新的技術であることは間違いない。
●GPSナビを世界で初めて搭載したユーノスコスモ
今やどんなクルマでも当たり前の装備になったGPS方式のナビゲーションシステム。それを世界で初めて搭載したのがユーノスコスモの最上級グレード、20BタイプE CCS装着車だ。

当時、マツダでの呼称はGPSS(グローバル・ポジションニング・システム・ウィズ・サテライト)。車速や車輪速差、地磁気信号など実測データに頼った従来のナビシステムではマップ画面上と実際の車両位置に8パーセントもの誤差があったが、人工衛星からの電波で現在位置を知るGPSSでは、通常プラスマイナス50m以内に収まるという格段に高い精度を実現していた。
ただし、マップ縮尺は基本的に20万分の1、東京と大阪の都市部は2.5万分の1で、幅員3m以上の道路を網羅する。しかも、カタログにある解説を読む限り、あらかじめ設定した目的地までの道案内が主な機能とされる今時のナビシステムとは違って、マップ上に現在位置をより正確に分かりやすく表示することに重きが置かれていたようだ。

また、今ほど人工衛星が多くなかったため受信電波が途切れがちで、マップ上と実際の自車位置に大きなズレが発生する…ということも割とよくあったという話。マップデータの記憶媒体がCDというところにも時代を感じるところで、オーディオ共用のCD12枚チェンジャーにマップCDを装填しておき、画面のタッチパネルで必要なエリアのマップを呼び出すという作業が必要だった。
TEXT:廣嶋健太郎(Kentaro HIROSHIMA)