






MF:今回KPCが入ったことで、走りが凄く良くなったように感じられましたが、KPCは現行ND型ロードスターのリヤサスペンションが持つ、制動時のアンチリフト特性を最大限活かしていると伺っています。KPCはND型ロードスターを開発する時点で、いずれ投入しようという計画があった技術なのでしょうか?
梅津さん:ND型ロードスターが開発された後ですね。私は先代NC型の最後のモデルからロードスターを担当していますが、2015年にND型ロードスターを発売したのと同時進行でFF車用のGVC(G-ベクタリングコントロール)を開発しており、2016年に発表しました。
私は1.5Lのロードスターの開発を終わった後は、アバルト124スパイダーの開発を担当しており、それが落ち着いたのが2016年末から2017年くらいでした。そこからKPCの開発をスタートしています。
経緯としては、ロードスターは従来より、低速域でのヒラヒラ感、軽快感を大事にしており、それによってスポーツカーとして独自のポジションを築いてきました。これはND開発時にも大事にした所ですが、一方で、低速域でのヒラヒラ感を作ろうとすると高速域・高G領域ではどうしても頼りない、フワフワした感覚が出るので、その二律背反をどうするかが、ロードスターが初代より抱えている長年の課題でした。
梅津さん:それを何とかしたいという想いがあり、ND開発時点ではリヤサスペンションのアンチリフトジオメトリーを、NC型よりも大きく強めています。これは、制動時にリヤが浮き上がらないように、ブレーキがかかったら車体を沈み込ませる構造にしているんですね。これはNC型のサスペンションを改造して、リンク配置などを変えて検討し、決めたものでした。結果としてNDロードスターは、ショートホイールベースで小さいクルマですが、制動姿勢は全体に沈み込むような、安定した姿勢ができていると思っています。
ただ一方で、やはり高G領域での浮き上がり、そのロールにともなう浮き上がりジャッキアップを特徴として持っていたので、これを何とか重量を増やさず、デバイスを付け加えずに改善しようと思った時に何ができるかを考えてきました。それが2018~19年のことです。
そのためにいろんな試行錯誤を2017~18年でしてきて、KPCのアイデアを思いついた後もいろいろ試して、その結果「これだ」ということになりました。これはGVCも、最終的にはサスペンションジオメトリーとのバランスで、FF車はアインチダイブが弱い……マツダのFF車はアンチダイブジオメトリーを弱く付けているのですが、それでフロントのピッチが入るということを発見し、後輪駆動車にも同じような思想を取り入れようと。
そこで、何が後輪駆動車の場合は弱く、何が効果を出せるかと考えると、やはり高G旋回中のリヤの内輪の浮き上がり、これが一番キツいんですね。しかし、リヤ内輪の浮き上がりをただ抑えると、ロードスターのヒラヒラ感が失われてしまう。そのふたつを両立するアイデアとして、アンチリフトを活用した制動によるボディの引き下げを入れることになりました。
二輪車の右足ブレーキ、後輪ブレーキを使って車体を引き下げるテクニックがありますが、スイングアームの角度が付いている車両ならばリヤブレーキで車体が引き下がります。それと同じことをロードスター自身がするということですね。
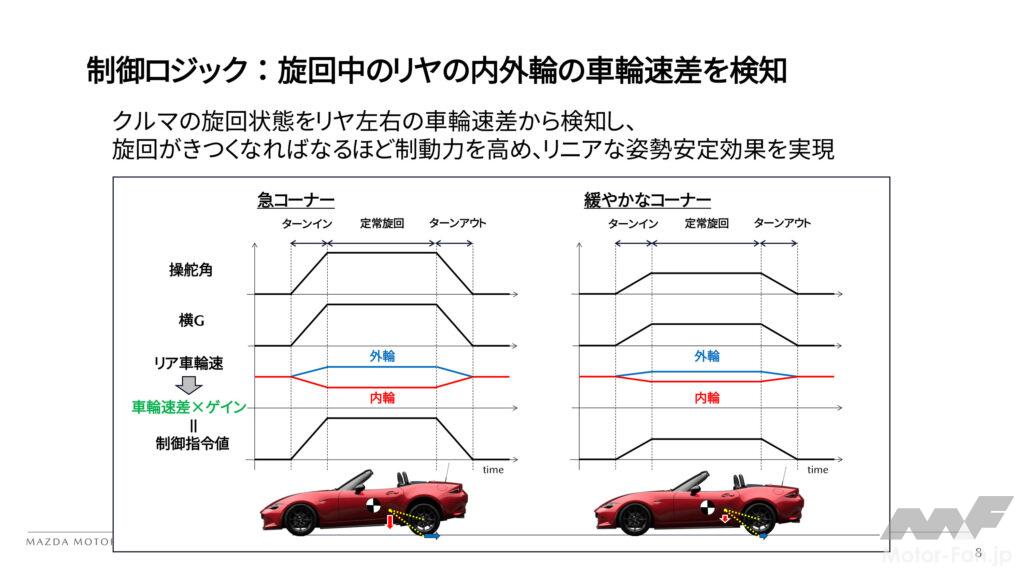
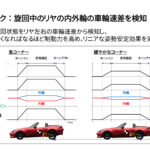
KPCは人間の操作を一切センシングしておらず、ある意味LSDのようなもので、後輪左右の車輪速差だけを検知して、旋回がどんどん強まっているのをロードスター自身が認識して、ちょっとブレーキをかけて車体を引き下げます。人間の操作を阻害したり邪魔したりするようなものではなく、ロードスター自身が、馬自身の走るフォームが整った……そういう技術と認識いただければと思っています。
MF:先ほどLSDのお話がありましたが、ブレーキをつまむタイプのLSDは他社さんにもあり、そちらは曲げる技術ですが、KPCは姿勢制御の技術だと。その違いを、もう少し噛み砕いてお教えいただけますでしょうか?
梅津さん:わかりました。今回は混乱するので紹介しておりませんが、内輪が空転するような領域においてはブレーキLSD制御も入れていますので、オープンデフでもトラクション性能は上がっています。それは置いて説明しますと、KPCはブレーキをかけることでヨーモーメントを与えるトルクベクタリングや、内輪のスリップを良くするブレーキLSDとは、目的がまったく違います。
KPCは単純に、トルクベクタリングbyブレーキとは、1/10くらいの制動力しか使わないですね。なぜそれができるかというと、ロードスターは強いアンチリフトジオメトリーのサスペンションを持っているからです。ですから、KPCと同じことを他の車種でしても、全然効かないんですね。

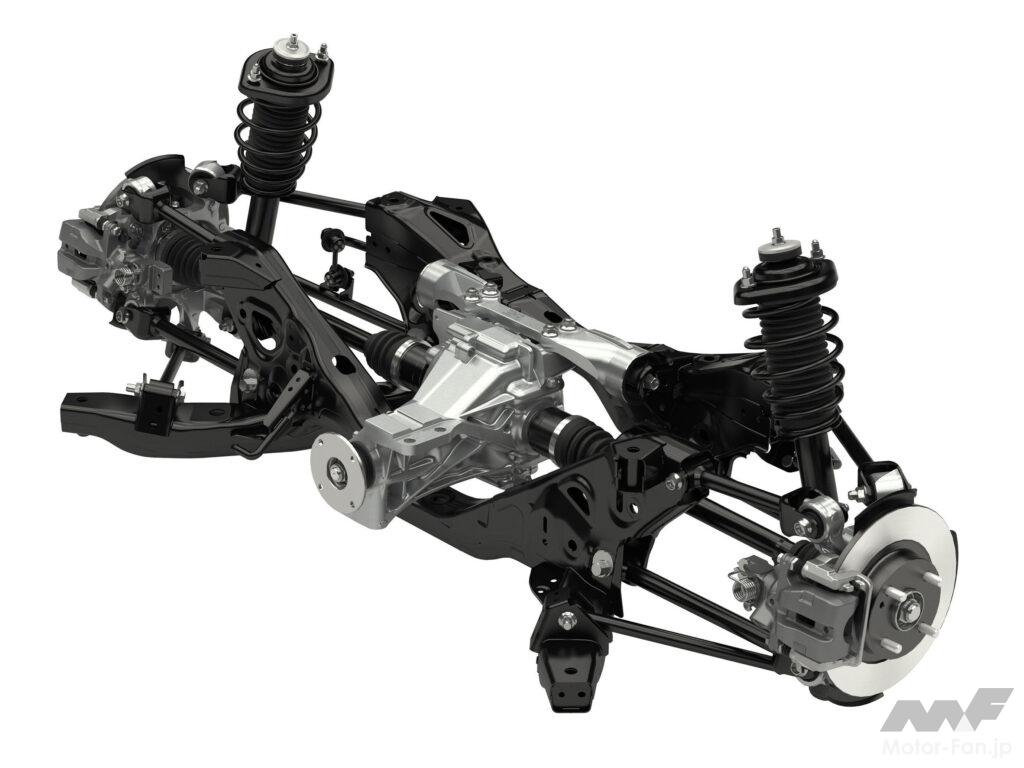
このアンチリフトの軸点は、仮想トレーリング軸と言いますが、マルチリンク式なので、実際にアームがあって軸点があるわけではないんですが、上の図中左上の点を軸にストロークします。点線はストローク軌跡ですが、制動力をかけると引き下げられて、車体が下がる方向に力が働きます。スーツケースを引いている際、段差に引っ掛かったら持ち手が下に引き下げられる……それと同じ原理です。
それで、サスペンションジオメトリーがこのようになっているので、制動力がヨーではなくアンチリフト力につながる、そこがポイントになっていますね。
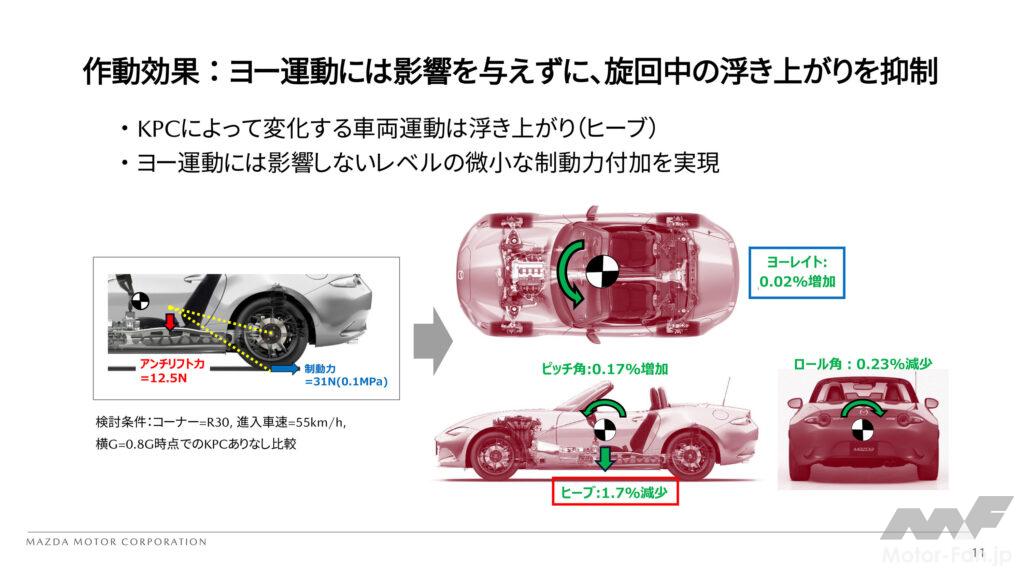
梅津さん:上の図をご覧いただくとわかりますが、制動力31Nm=0.1MPa、これはどのくらいかというと、ブレーキペダルに足を乗せた程度のレベルです。トルクベクタリングbyブレーキは5MPa以上、ESC(横滑り防止装置)が働くときは約10MPaかけますので、それらに比べると桁が違います。非常に微少なブレーキをかけていますので、ブレーキパッドの摩耗や発熱はまったく気にしなくていいレベルです。
この制動力がかかった時に、このアンチリフトジオメトリーのサスペンションでは、ばね上を引き下げるアンチリフト力が12Nmくらいかかる構造になっています。普通のクルマはもっと軸点が低く、そうするとこの引き下げ力が出ません。仮想トレーリング軸の傾斜角が浅ければ引き下げ力が出ず、単純にヨーになるわけです。
でも、ロードスターの場合は引き下げ力にベクトル分解できるので、それが図中右側……車両運動にどう効くかを分析した結果、ヒーブ(浮き上がり)が元の状態から約2%減少することが確認できました。
それに対してピッチ・ロールを改善する効果は0.2%前後ですので、1/10ぐらいの効果ですね。さらにそのヨー方向、トルクベクタリングとでヨーモーメントを付加する効果は0.02%、1/100程度なので無視できます。
我々は、ヨー方向にはクルマを動かしたくないのです。それは、タイヤの横力を出して曲がるという、クルマの運動から外れていく、違和感につながると思っているので、KPCではとにかくばね上を引き下げることだけに注力しています。
ですから、KPCは旋回性能を上げるものではなく、浮き上がりを抑えることでドライバーの安心感を改善するためのものです。この浮き上がりは、ロール軸が地上にあるクルマならば、必ずロールにともなってジャッキアップしていきますので、必ず浮き上がります。どんなクルマでも浮き上がります。それを抑える手段を、こういう非常に簡易な手段で実現しているのが、KPCの新しい所ですね。
ジャッキアップ点よりこうロールセンター軸が上にあるので、必ず横力に対してジャッキアップするんですね。ですので、これを抑える手段は、基本的には空力で抑えるか、アクティブサスペンションで無理矢理抑えるかしかないわけです。
KPCはクルマ自身が姿勢を安定化させるわけですから、そういったデバイスなしで自然に、ジャッキアップ力が増えていくとそれを抑える効果があるわけです。
MF:ハードウェアは、ESCも以前と変わっていないんでしょうか?
梅津さん:今回のロードスターは「990S」以外、ハードウェアは何も変わっていません。
MF:微少なコントロールは元々ESCの性能として楽勝でできるものなのでしょうか?
梅津さん:できません。ESCは5~10MPaの領域で設計されていますが、ロードスターに採用しているユニット自体が高性能なので、分解能は元々高かったんですが、サプライヤーさんは0.3MPa以下の液圧を使用領域として想定していませんでした。しかし、我々が検証するなかで、このユニットならばコントロールできる、我々が制御を上手く作ればできることは確認できていたので、逆にマツダ側がサプライヤーさんへ提示して、「大丈夫ですよ、できますからやらせてください」という形で進めていますね。ですからESCでこれほど微少な液圧をコントロールしている例は他にはないと思います。安いESCユニットではできないと思いますね。
MF:ロードスターのESCユニットのサプライヤーは?
梅津さん:ボッシュの「ESP9」というユニットですね。

MF:もうすぐ後輪駆動車ベースの新しいモデルが発売されると思いますが、それにもKPCを使おうと思ったら、そのリヤサスペンション自体がアンチリフトジオメトリーになっていないとあまり効果がない、ということですよね。
梅津さん:ですから、これから発売するラージプラットフォームのクルマは、KPCありきでサスペンションジオメトリーを設計しています。ですが、仮想トレーリング軸点を高い所に置くのは、リヤシートの座面の高さや荷室容量に直接的に影響してくるんですね。なぜならトレーリングアームの角度を立てなければならないからです。
特に、仮想ではなく、実際のトレーリング軸を持っている形式のサスペンション、例えばトーションビーム式ですと、軸点を上げていくと当然パッケージングが厳しくなるわけです。ですからトレーリング軸点が高いクルマは少ないですね。
ばね上制振制御を取り入れているリヤeモーターのクルマがありますが、リヤサスペンションのジオメトリーを見るとどう考えてもばね上制振制御はできない……というクルマはあります。
ですから、サスペンションジオメトリーとの組み合わせが、駆動力制御は非常に大事で、マツダの場合は人馬一体感を出すためにはばね上の姿勢を理想化することが、ヨー方向よりも圧倒的に大事だと思っているので、そこが他のメーカーさんのとスタンスの違いだと思います。
それを実現するための駆動力制御をどうするかですが、我々はサスペンションジオメトリーとの組み合わせに関しいろいろな手段を持っていますので、ラージプラットフォームでも最大限活かすように、SUVですがアンチリフト角をしっかり付けたジオメトリーにしています。
MF:KPCはESCをオフにすると一緒に切れる仕組みになっていますが、分けることはできないのでしょうか? つまり、ESCをオフにしてもKPCを効かせることができないものなのでしょうか?
梅津さん:できるんですが、「そのために2万円払いますか?」ということですね。スイッチを追加するのは非常にコストがかかります。GVCの際にも同じ議論がありましたが、GVCはオフにする必要がないのでそうしませんでした。
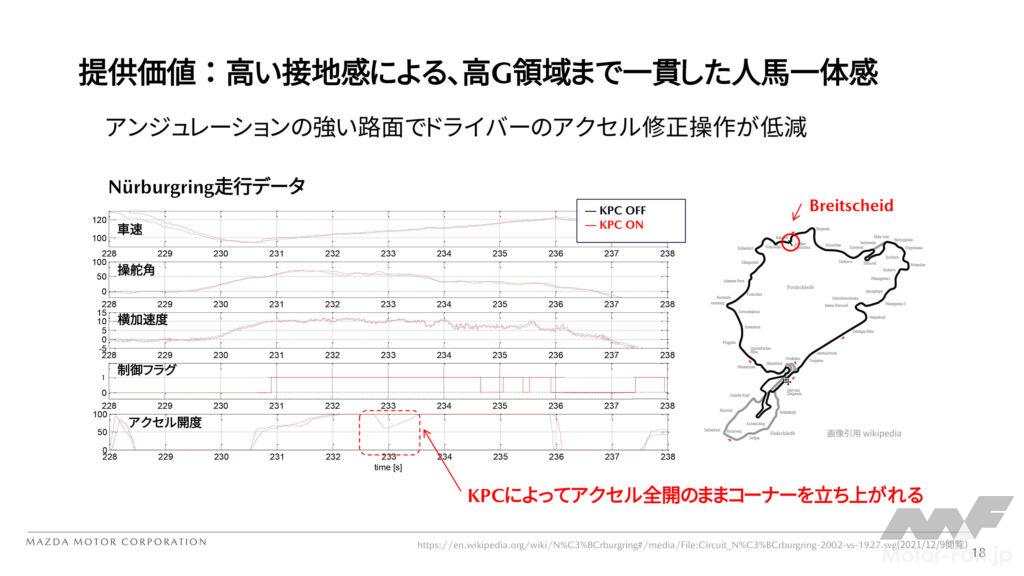
今回のKPCの場合、ロードスターはモディファイされるクルマなので、車高を下げてもブレーキパッドを変えてもLSDをもっと強いものにしても、KPCは車輪速しかセンシングしていませんので、全部自然に適合するんですよ。ニュルブルクリンクで私自身が300ラップ以上して、まったく問題ないことを確認しています。
しかし、ジムカーナでサイドターン用にリヤの制動力が強いパッドを入れ、LSDも強く効かせていると、KPCが若干ブレーキを引きずって若干タイムロスになるケースがあります。フィーリング上はまったく問題ないんですが、0.1秒を争うジムカーナ競技の場合はない方が速いケースがあるということも考えて、オフできるようにしました。ですが、おっしゃることはよくわかりますので、将来的にお客様にコストをかけないような形で、KPCとESCを独立した形でオンオフできるようになれば、そうしたいと思っています。
MF:KPCのおかげで、より安心して走りを楽しめるようになりましたが、既存のND型ロードスターユーザーもKPCが欲しいと考えていると思います。KPCは既販車にも簡単に実装できるものなのでしょうか?
梅津さん:既存車のプログラムの書き換え自体は技術的に可能ですが、お客様に提供するためには、検討事項がまだまだあるのが実情です。お客様からの要望があるのは事実なので、実現に向け検討したいと思います。
MF:実現を心から期待しています。ありがとうございました!