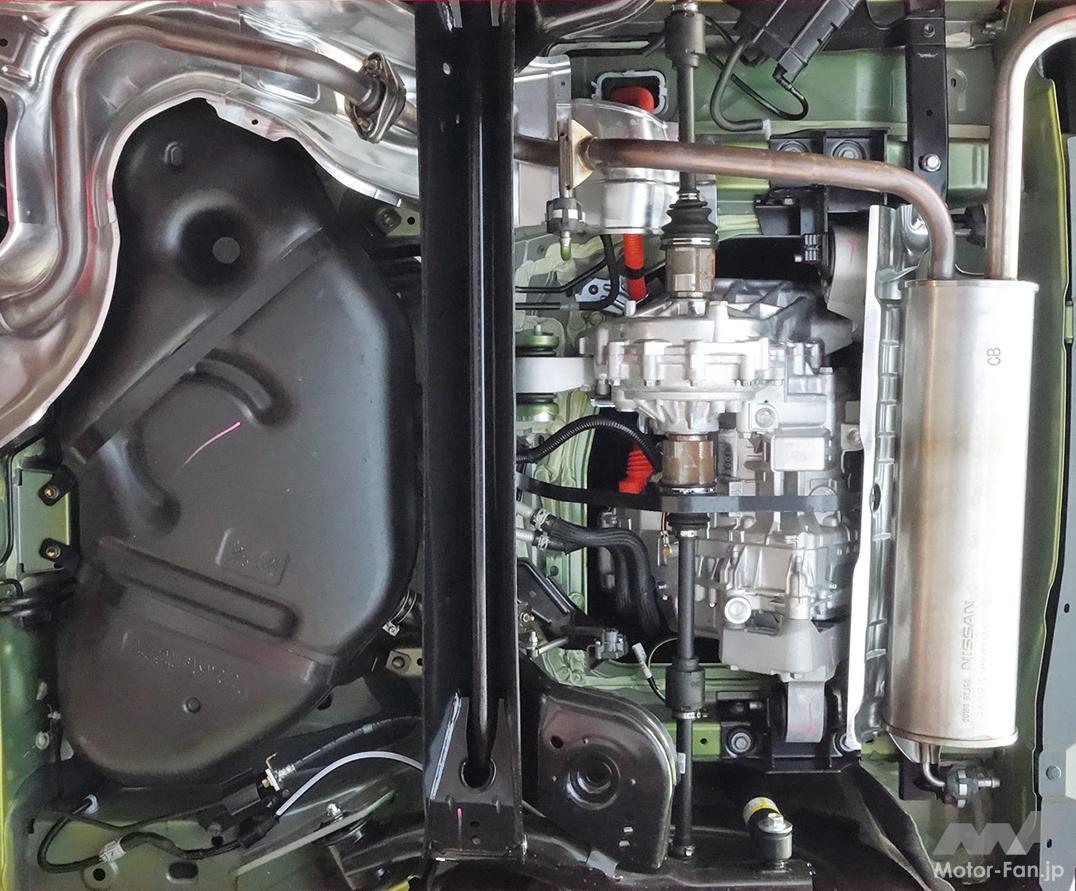
日産e-POWER 4WDの秘密。欲しかったのはリヤ50kWの出力。

TEXT:安藤眞(Makoto ANDO) FIGURE:NISSAN
モーターファン・イラストレーテッド vol.185号より一部転載
今や日産の看板となった電気駆動技術e-POWER。自動車工学的には、従来からあるシリーズ式ハイブリッドシステムだが、“車輪を駆動するのは電気モーターだけ”というメリットを活用し、モーターならではの制御性を生かした質の高い乗り味で好評を博している。
とくに秀逸なのが、新型ノートe-POWERで追加となった電動4WDシステムだ。必要に応じてリヤモーターの駆動/制動力を使用することで、運動性能や乗り心地を向上させている。e-POWER 4WDのスペックはどのように決まり、どのような制御を行なっているのか。
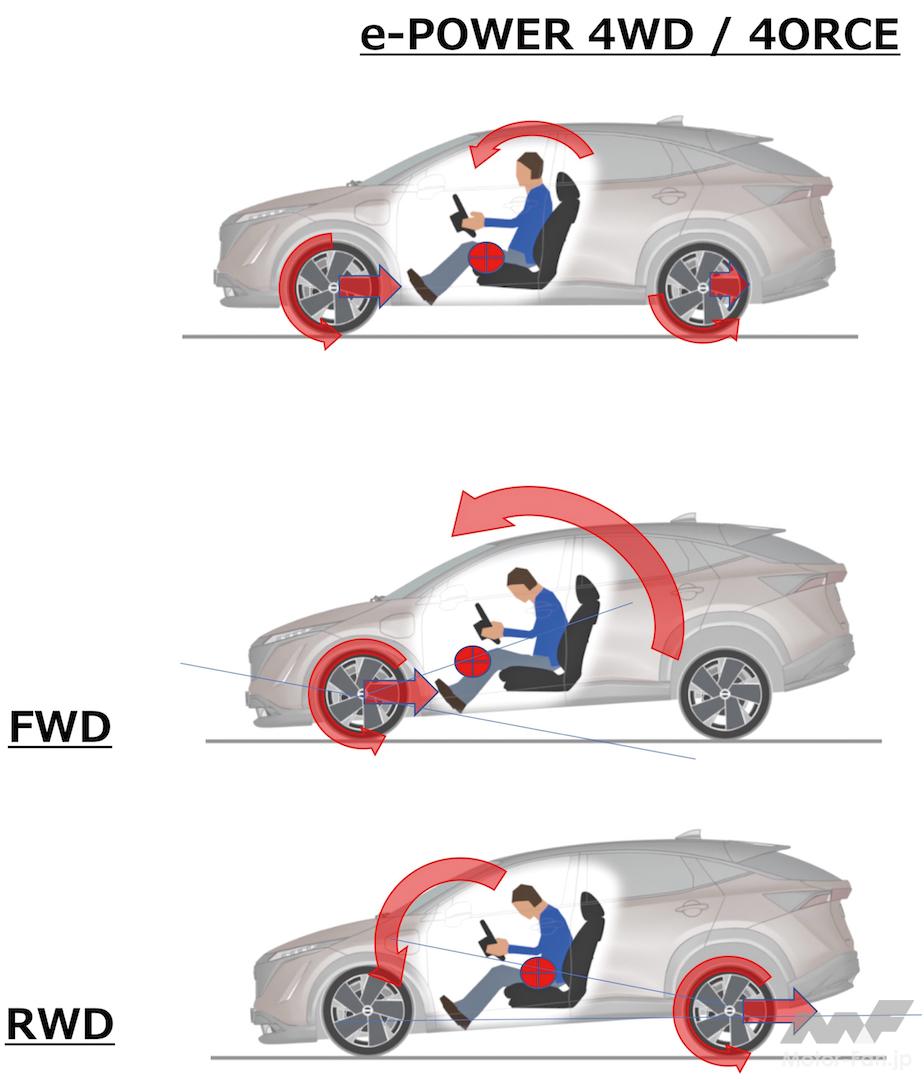
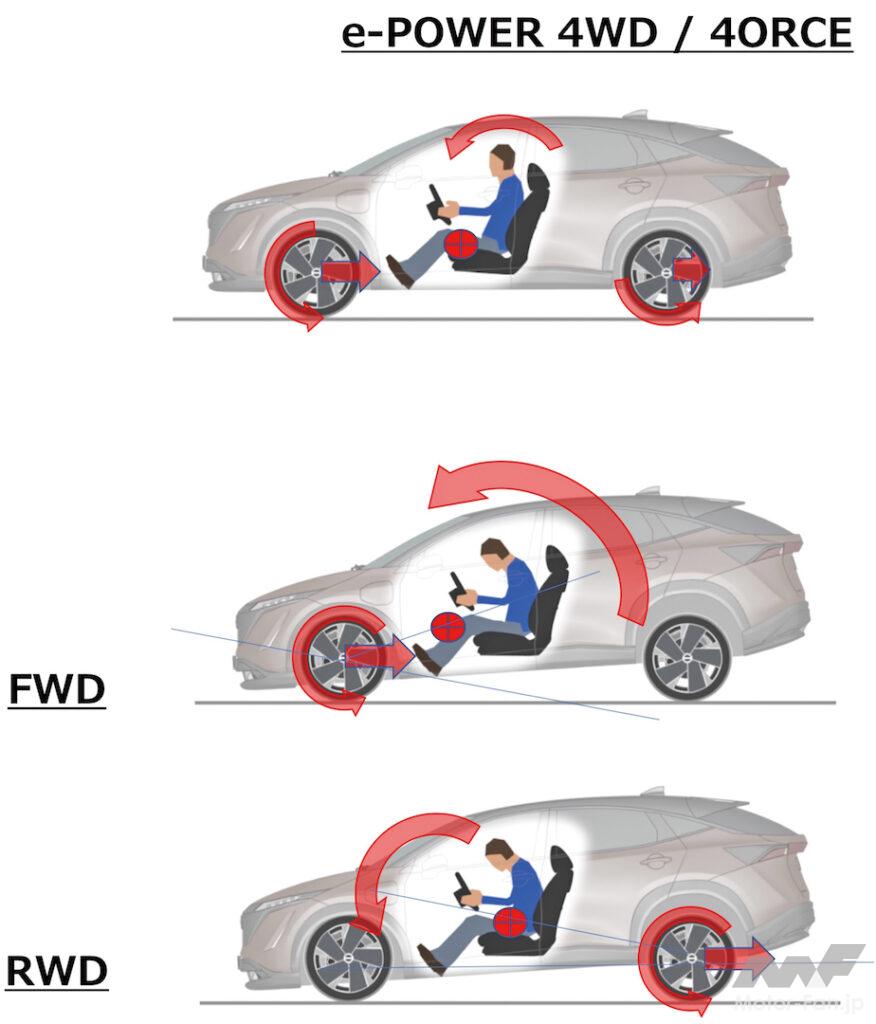
「日産車共通のコンセプトが、Confident Drive(自信を持って運転できる)です。それを構成する3つの価値として、①修正操舵が少なく描いたラインを走れる、②すべての乗員がリラックスできるヨー/ピッチモーションとシートサポート、③ノイズや振動に妨げられない居室空間、を掲げています。これら3つの価値を、電気駆動4WD化によって、①卓越したハンドリングの扱いやすさ、②路面を問わない安心感、③乗るすべての人に快適な乗り心地、に引き上げることができます。4輪で駆動/回生制御を行なえば、これらをもっと高いレベルにまで引き上げることができる。それがe-POWER 4WDの狙いです。さらに、ARIYAから導入されるe-4ORCEでは、インテリジェントトレースコントロールなど、ブレーキ制御によるシャシーコントロールとの協調制御を行なうことで、より質の高いConfident Driveを提供していこうと考えています」

日産がAWDによる運動性能向上に着手したのは古く、1987年にデビューしたU12型ブルーバードの“ATTESA”にまで遡る。これは機械式センターデフにビスカス式LSDを組み合わせたものだったが、89年には電子制御トルクスプリット方式の“ATTESA E-TS”に進化させ、R32型スカイラインGT-Rに搭載。能動的なトルク配分による運動性能制御に踏み出した。
「e-POWER 4WDを開発した際も、ATTESA E-TSの思想をイメージしました。旋回初期にフロントに駆動力がかかっていると、ベクタリング効果が生まれてスムーズに旋回が始まります。しかも駆動力の影響を受けてタイヤの着力点が前に出ますから、コーナリングフォースが少し高まります。旋回姿勢が決まってからは、前輪の駆動力を落として後輪の駆動力を高めます。こうすることで、前輪の横方向グリップに余裕ができますから、アンダーステアが抑制できます。脱出時には前後をバランス良く使うことで、駆動力と安心感の両立を図っています」
“自信を持って運転できる”というのは、“各輪のグリップに余裕を持たせる”ということだというのが、日産の考えかただ。
さて、制御内容を説明いただく前に、スペックの点で、ひとつ確認しておこう。電動AWDでは先行する三菱のアウトランダーPHEVは、“4輪の摩擦円を使い切れる駆動力配分”として、前後モーターの最高出力比を46:54と後輪リッチにしている。いっぽうで、ノートは63:37、オーラは67:33と、前輪リッチな設定となっている。これはどのような考えかたからなのか。
「ノート/オーラには2WD仕様があるため、フロントモーターの出力はそちらで決まっています。いっぽうでリヤモーターの出力は、相当のこだわりを持って決めました。たとえば、雪道で40km/h+0.2Gの定常円旋回から保舵したまま加速した場合、もっとも安定した状態で旋回し続けられるリヤモータースペックが100Nm/50kWであるということが、実験から得られています。グラフにもあるように、これよりリヤモーターの出力が小さいと、フロントが先に流れてアンダーステアが強くなり、大きいとWOT時にオーバーステア傾向となります。また、ドライ路面でのシケイン通過でも、出口でもっとも操舵角が少なくなるのが、100Nm/50kWという仕様だったのです」
では、そのハードウェアを具体的にどう制御しているのか。まず動力性能と運動性能の領域からご説明いただこう。
「基本的な駆動力配分は、前後重量配分相当(59:41)にしています。そこからアクセルを踏んでいくと、要求駆動力によって発生する荷重移動を加味した配分へとフィードフォワード制御を行ないます。制御は0.33Gまで行ない、そのときの駆動力配分比は52:48になります。それ以上にアクセルを踏み込んでいくと、今度はフロントを増やしていき、接地荷重に合わせた駆動力配分というより、フロントから引っ張って加速度を高めるという制御を行なっています」
旋回時はどうか?
「前輪駆動では、曲げる機能と加減速の機能が前輪に統合されているため、コーナリングフォースと駆動力で摩擦円を使い切ってしまいやすい。これが4WDになると、駆動/制動力を後輪にも負担させることができますから、前輪の摩擦円に余裕を持たせることができます。ステアリングを切ると横Gが発生し、内輪側の接地荷重が減少し、それに応じて摩擦円は小さくなりますから、そこからはみ出さないように、駆動力制御を行なっています。その際にも、前を下げたぶんは後に足しており、加速力が変わらないようにしています」

制御は滑りが生じてから駆動力配分を変えるフィードバックではなく、車速や操舵角などをもとにしたフィードフォワードで行なっている。
「ロール剛性のバランスから、旋回時には前後輪の接地荷重も変わりますが、それらを加味した駆動力配分へとフィードフォワード制御を行ないます。ドライバーが運転していて『気持ちよい』と感じるGは、加速方向で0.3G、旋回方向で0.5G程度です。これを超えると『頑張ってGに耐えている』という感覚が出てきますが、ノートのお客様の多くは『気持ちよい』と感じられる範囲で走られると思いますので、その範囲をカバーする制御を行なっています。実際には、加速方向で0.35G、旋回方向で0.6Gぐらいになってもアンダーステア感はまったくなく、アクティブアンダーステアコントロールも介入しません。ノートは車重が軽くてホイールベースも短いため、そのくらいの領域までなら、ブレーキとの協調制御まで行なわなくても、(それを行なう)e-4ORCEと同等の性能が提供できています」
ウェット路面での加速円旋回を比較したビデオを見せてもらったが、加速方向0.3G/旋回方向が0.6Gの旋回では、2WD車は車両1.5台分ぐらい旋回軌跡が膨らむのに対し、e-POWER 4WDはインベタを維持したまま回っていく。
ウェットよりさらに滑りやすい氷雪路では、要求駆動力(アクセルペダルの踏み込み量)と車輪の回転角速度変化から路面のμ判定を行ない、低μ路専用の制御に切り替わる。
「低μ路では、後輪が先に滑り出さないよう制御を行なっています。後輪が先に滑るとヨーモーメントが発生し、修正操舵が必要になりますから。加えて、前後輪の回転速度がほとんどズレない制御を行なうことで、圧雪路の20%坂路でも進路の乱れない発進が可能になりました」
もちろん旋回性能も、大幅に高まっている。
「従来型ノートのe・4WDはモーター出力が3.5kW/15Nmと小さかったので、車速が25km/hを超えたぐらいでFWDになってアンダーステアが大きくなってしまいました。それがe-POWER 4WDでは、最高速域までリヤモーターも駆動していますから、80km/hでの旋回中に駆動力を加えても、理想的なラインをキープすることができます」
凍結路での制動性能も、e-POWER 4WD化で大きく高まった領域だ。
「回生ブレーキのスリップ制御を緻密化することで、40km/hからのアクセルオフ減速では、従来型ノートのe・4WDに比べて、2WD車でも約20%、e-POWER 4WDなら約40%短い距離で止まれます。もちろん、ABSより大幅に短い距離で止まれます。ABSは油圧制御のため、断続が生じてしまいますが、回生ブレーキなら途切れのない制御が可能になりますから」
加減速時のピッチング制御にも、駆動/制動力を使用しているとのことだが、リヤサスペンションのジオメトリーから考えると、加速時に駆動力をかければスクワットが発生し、減速時に回生制動すればピッチングが大きくなるように思える。ところが試乗してみると、いずれも減少しているように感じられるのだが、これはどのようなマジックを使っているのか。
「じつは制動時には、ピッチ角そのものは増えています。ピッチ角を抑えるならば、フロントだけで回生したほうが、フロントサスのアンチダイブ力が効いてピッチングは抑制できます。しかし、最初にe-POWER(2WD)を出したときに、『e-PEDAL酔いをする』という声がユーザーから寄せられまして、『ピッチ角が小さいだけではダメなんだ』ということに気づいたのです。確かに後輪に回生制動を加えると、リフト力が作用してピッチ角は大きくなりますが、前後の制動力配分によって、動的なピッチ中心をドライバーの背中付近に持っていけば、ドライバーを中心にピッチ挙動が起きるので、ピッチングを感じにくくなるのです。その制動力配分が6:4であるため、回生制動の比率は制動Gにかかわらず、一定にしています」
では、加速方向は?
「基本的な駆動力配分比率は変えずに、リヤモーターのトルク応答をフロントよりわずかに早めています。前後同じタイミングでトルクをかけると、タイヤがよじれることによって一瞬フロントが沈み、それが戻りながら、荷重移動によるスクワットが発生しますから、ピッチ挙動がより大きく感じられてしまうのです。後輪から先に押し出してやれば、これを抑えることができるのです。巡航から加速する際にもこれができるよう、低速巡行時でもリヤに駆動力をかけ続けています」
後輪に駆動力をかければ、タイヤがよじれて沈み込みが生じるはずだが、このタイミングではまだ荷重移動による沈み込みは発生していない。それが起きるのは、タイヤのよじれが戻るタイミングになるため、動きが相殺されてスクォートは過大にならず、ピッチ挙動が小さくなったメリットだけを感じることができる、ということらしい。うまいことを考えたものだ。





