日立Astemoが電動化車両の乗り心地を向上させるアンチジャーク制御および電費・安定性を向上させるモータートルク制御のプロトタイプを開発
自動車の運転において、車両を停止させる際の減速時には、速度に応じて適切にブレーキを緩めたり、強めたりして制動力をコントロールしないと、ジャークが起き、乗り心地を損なう揺り返しが発生するという課題があった。日立Astemoではこの課題解決に向け、電動化車両の特徴を生かしたプロトタイプの開発が行われた。
電気を動力とするモーターの回転する力であるトルクは、燃料を燃焼させ動力とする内燃エンジンのトルクと違い、ドライバーの操作に対する高い応答性を持ち、加速や減速の際、一気にトルクを高めることができる。電動化車両では、アクセルをオフにした際に、素早くモーターの回転を抑えるようトルクを効かせ、その力を制動力としつつ電気エネルギーに変換する回生ブレーキという仕組みも備えられている。
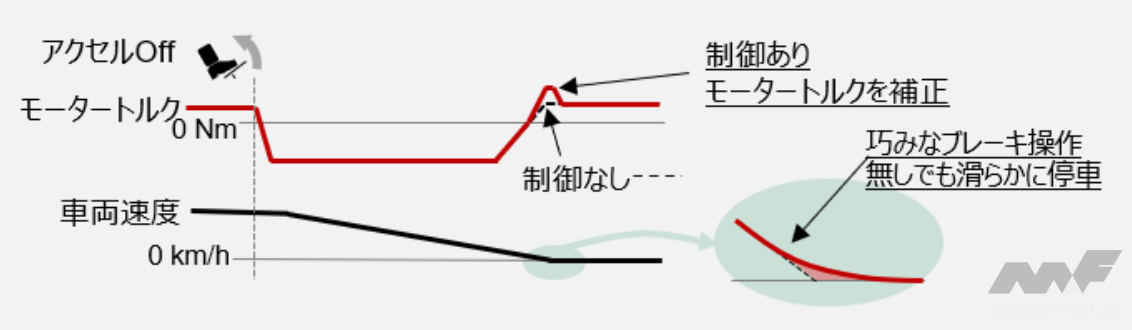
日立 Astemo では、こうした電動化車両の特徴である、モーターのトルクの特性や回生ブレーキの制動力を生かし、アクセルをオフにした際の、モーターの制動力が最適になるようトルク量を制御し、ジャークを抑制するアンチジャーク制御が開発された。この制御により、熟練したドライバーによる巧みなブレーキコントロールで揺り返しの少ない滑らかな停車を、一般のドライバーでも簡単に実現できる。
また、電動化車両において、凍結した滑りやすい路面を走行する場合、アクセルをオフにした際の回生ブレ―キによる減速だけで、タイヤがスリップしてしまい、操舵性や走行安定性が低下してしまうことが課題とされている。これを回避する方法として、回生ブレーキの作動を止めることで、タイヤのスリップを抑えることも可能だが、電気エネルギーの回生量を減少させることになり、電費を悪化させてしまう。
日立 Astemoでは、この課題に対し、回生ブレーキ自体を止めてしまうのではなく、駆動モーターのトルクを車両の走行状態に合わせ制御し最適な制動力とすることで、アクセルをオフにした際の減速時でも、タイヤのスリップを抑え、走行状態を安定させつつ、電気エネルギーの回生を継続することができる、モータートルク制御技術が開発された。この技術により、電気エネルギーの回生量と、減速時の高い走行安定性による安心感を両立させることが可能である。
※1:加速度の変化率。車両停止時には、振動、揺れを伴う勢いのある加速度が発生しやすく、これをジャーク(加加速度)という。






