









目次
リアルタイムAWDとビスカスカップリング式

滑りやすい路面のほうがAWDの機能を確認しやすいから試乗のステージを雪上に求めただけで、決して「AWDは雪道専用」というわけではない。乾燥した舗装路を走っていても、AWDの恩恵は充分に得られる。「ホンダのAWDの考え方を説明します」と、開発に携わる技術者は次のように説明した。
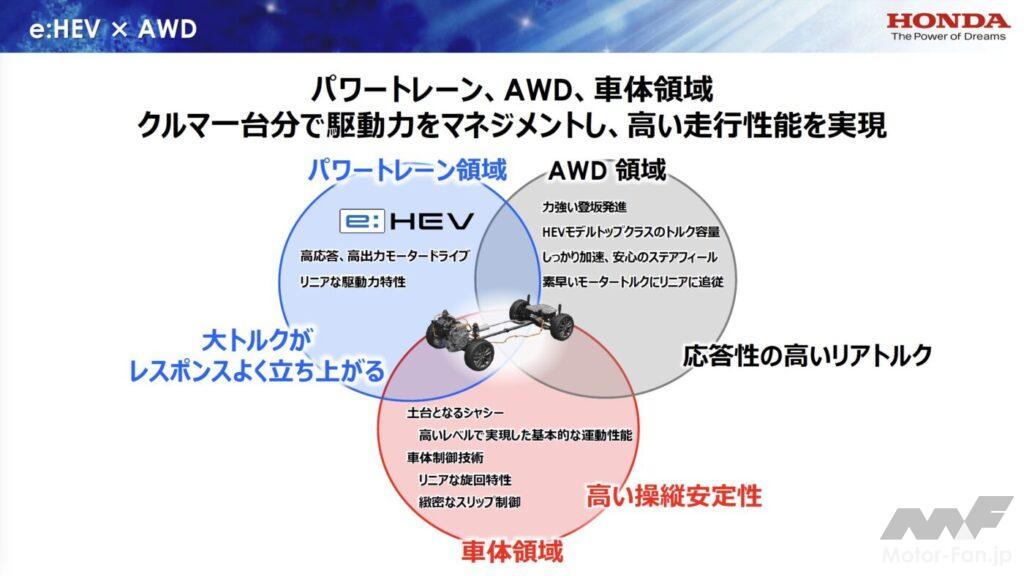



「タイヤのグリップ力には限界があります。クルマの加減速やコーナリングは、タイヤのグリップ力の範囲内でのみ可能です。例えば、駆動力だけでタイヤの摩擦円(グリップ力の限界)を使い切ってしまうと、横力を出すことができず、曲がりにくい状態になってしまいます。AWDは駆動力を前後輪に分散することでタイヤの負荷が均衡化されるので、加速性能や旋回性能を向上させることが可能になります」
フロントにエンジンを搭載し、前輪を駆動して走るFFの場合、駆動力はフロントの2本のタイヤにのみ伝わる。タイヤの能力には限りがあるから、曲がろうとしているときにその能力のすべてを前輪で使い切ってしまうと、曲がろうとする力を出す余力は残っておらず、カーブの外にふくらんでしまう。いわゆるアンダーステアというやつだ。そんなとき、リヤに駆動力を配分してやると、フロントのタイヤに余力が生まれるので、曲がりたい方向にしっかり曲がることができるようになる。
それが、AWDの恩恵のひとつだ。雪道や凍結した路面、あるいは雨に濡れた路面や砂利道などでは、乾燥した舗装路よりもクルマの動きが不安定になりやすく、そうした状況では乾燥した路面よりもAWDの恩恵を感じやすい。「クルマが不安定になるシーンで、ドライ路面を走行するときと同じ気持ちで気軽に運転できる安心感を提供するのが、AWD車開発の考え方の土台になっています」とくだんの技術者は説明する。ドライ路面から滑りやすい路面へ、安心して運転できる領域を広げるのがAWDの役割だ。

e:HEV+ビスカスカップリングAWD



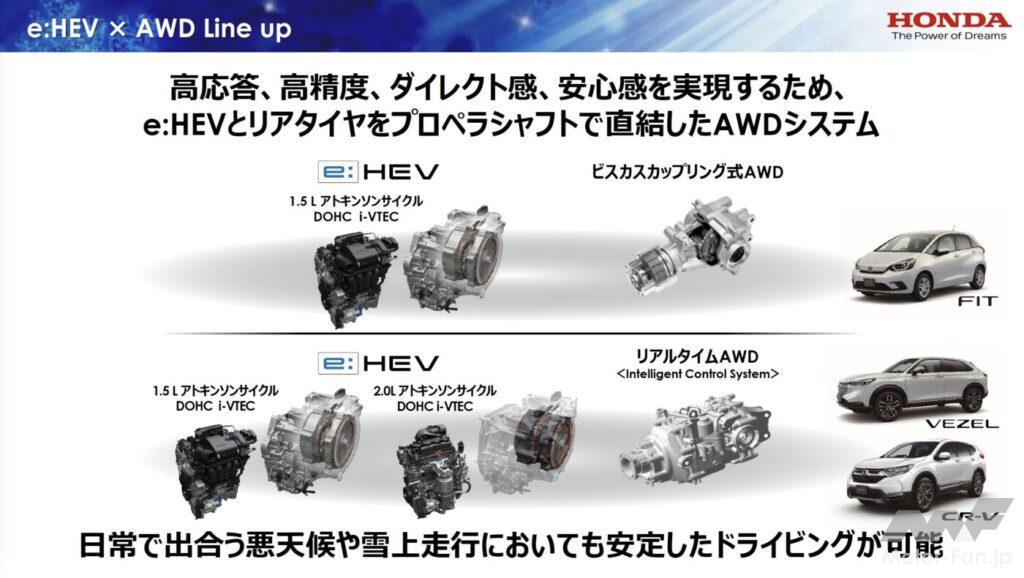
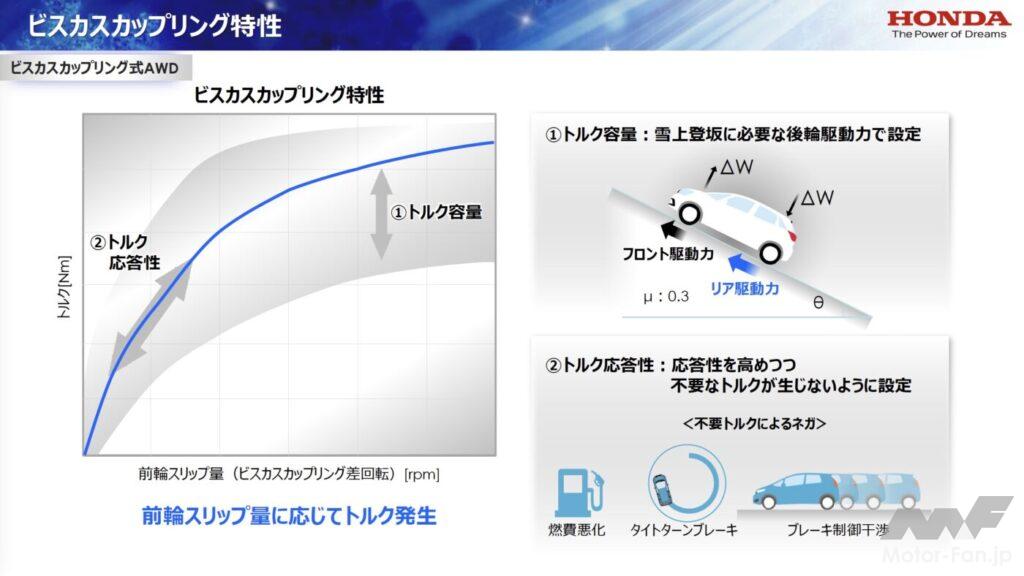
e:HEVと呼ぶホンダのハイブリッドシステムと組み合わせるAWDシステムは2種類ある。ひとつはビスカスカップリング式で、フィットに搭載。もうひとつはリアルタイムAWDと呼ぶシステムで、ヴェゼルとCR-Vに搭載している。ビスカスカップリング式はプロペラシャフトにつながったリヤデフケースの中に高粘度のシリコーンオイルとプレート(インナープレートとアウタープレート)があり、前後輪に差回転が生じるとオイルとプレート間の剪断抵抗が発生して後輪にトルクが伝わる仕組みだ。
電子制御で能動的にトルク配分を行なうのではなく、受け身(パッシブ)である。前輪がスリップして後輪との差回転が生じて初めて、後輪にトルクが伝わる。30年以上前から低コストで成立する普及版の4WDの位置づけで用いられており、ビスカスカップリングそれ自体に技術的な目新しさはない。ところが、雪上で乗ってみて驚いた。動きがとても滑らかで自然なのである。少し滑ってからグリップを回復し、そのために挙動が変わるといったようなこともなく、ドライ路面で走っているときのようにスムーズだ。なんなら、右〜左にコーナーをクリアしていく動きがとても気持ちいい。
e:HEVは高速域の一部の状況を除いて、基本的にはモーターで走る。エンジンではなくモーターと組み合わせたことで、ビスカスカップリングの持ち味が息を吹き返したようだ。前述したように、この方式は前輪がスリップすることで後輪に駆動力が伝わるのだが、前輪の駆動力を緻密に制御できるモーターを得たおかげで前輪のスリップ量を最適に制御できるようになり、リヤの駆動力を安定して発生させることができるようになった。
「なーるほどぉ」と膝を打つ思いだった。「ビスカスカップリングでしょ」と軽く見ていた自分を恥じたい気分で、見る目が変わったのは確かだ。小型モーターを搭載するAWDシステムの場合は発進〜低速でしか機能しないが、ビスカスカップリング式は高車速領域まで作動が可能で、そのぶん心強い。
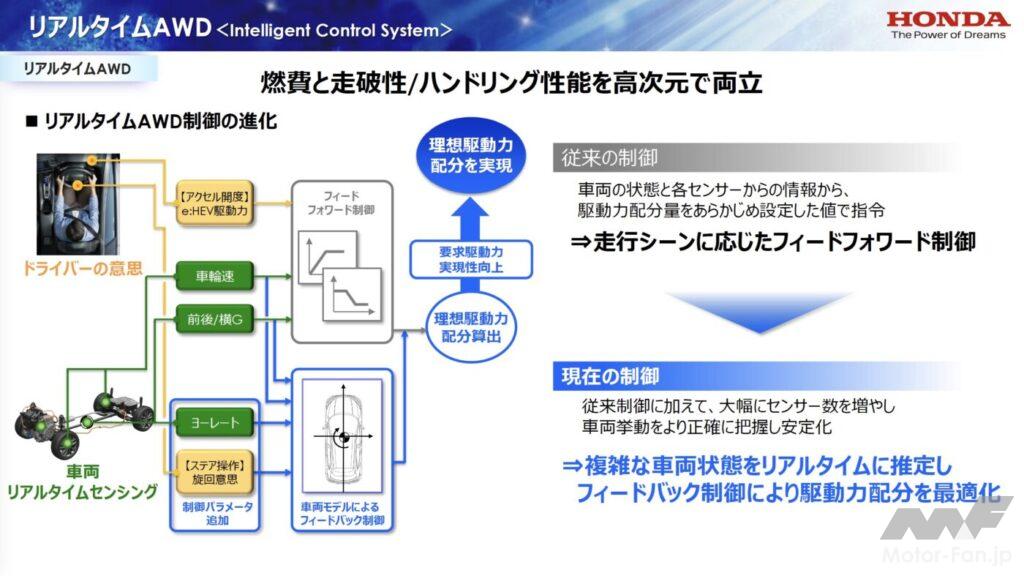
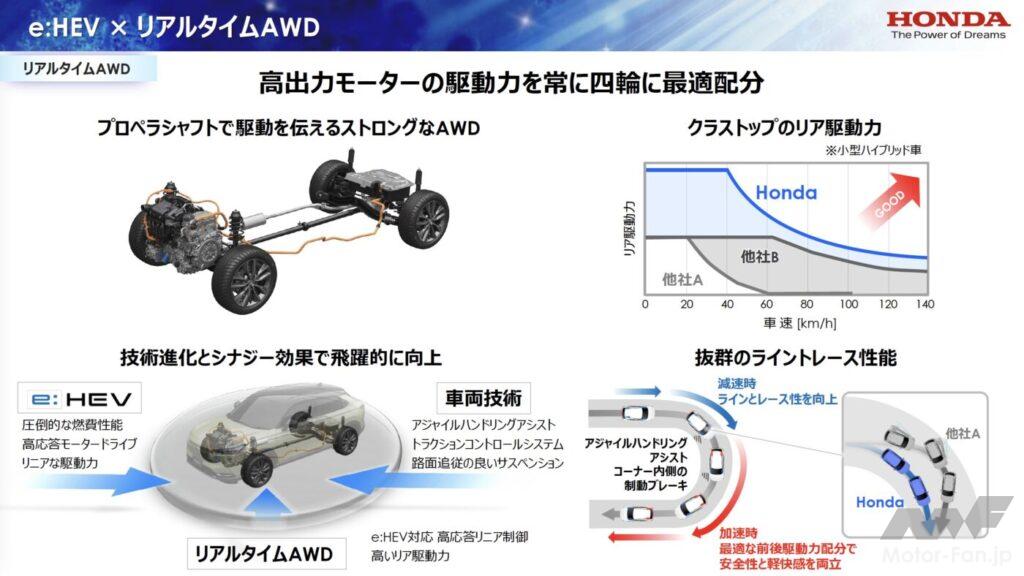
ヴェゼルとCR-Vが搭載するリアルタイムAWDは電子制御カップリングに分類されるシステムで、プロペラシャフトでリヤのデフ(カップリングユニット)にモーターの駆動力を伝えるところまではビスカスカップリング式と同じ。リアルタイムAWDは電子制御で油圧クラッチの押し付け力をコントロールすることにより、車両の状態に応じて適切に前後の駆動力を配分することが可能だ。
タイムラグなく四輪で駆動し、力強い加速を披露するのがリアルタイムAWDの特徴。発進時から、リヤに駆動力を伝達している(そのため、ドライ路面でもFF仕様より安定している)。従来制御では加速度によって変化する前後の荷重配分に合わせてリヤへの配分量を割り当てるフィードフォワード制御を行なっていた。2018年のCR-Vの発売に合わせてフィードバック制御を加えた新しい世代に進化している。ドライバーのステアリング操作やヨーレートから旋回状態を推定し、アンダーステア傾向の場合はフィードフォーワード分が足りないと判断してリヤの配分量を増やす制御を採用している。オーバーステアの場合はその逆で、要するに、ドライバーが思い描いたラインをトレースする方向だ。
御岳スノーランドはメーカー系の広いテストコースと違ってコース幅は狭く、一般道に環境が近い。エスケープゾーンがほとんどないから、「多少失敗してもいいや」と、のんきに構えるわけにはいかず、なかなかの緊張感を強いられる。思ったより曲がらなくて外にふくらむといった挙動が感じられると、減速するにしても、曲がるにしても、加速するにしても左右に余裕を持ってアプローチするようになる。だから、運転に気を使うし、慎重になり、車速も控え目になる。
ヴェゼルにしろCR-Vにしろ、リアルタイムAWDを搭載した車両は、過度な緊張感を強いてこなかった。感覚としてはほとんど、ドライ路面を走るときと変わらない。思ったように止まり、曲がり、加速していく。だから、目の前にある道を道幅いっぱいに使って走ることができる。少し走らせれば危なっかしさがないことがわかるので、自然とペースが上がる。思いどおりに動かないクルマではこうはいかない。
次のホンダは凄そうと実感させてくれる「コアバリュー」


試乗プログラムには“おまけ”があり、走る・曲がる・止まるのダイナミクスの性能に磨きを掛けた研究車両が用意されていた。ホンダはデザイン、HMI、ダイナミクスを三位一体とし、商品価値を高める活動に取り組んでおり、その活動を「コアバリュー」と呼んでいる。用意されていたCR-Vは三位一体のうち主にダイナミクスの面で手が入った車両で、新しいコンセプトのシート(前席だけでなく後席も)が装着され、ステアリングの角度は最適化。ダンパートップやナックルの剛性を高め、前後駆動力配分はリヤの配分比を上げていた。

制御うんぬんの前に、ステアリングを握ったときのしっかり感、切り込んでいったときの頼もしさに心を奪われた。しっかりしているから走りに積極的になれるし、乗り手の積極性をクルマが受け止めてくれるので、運転が楽しくなる。クルマがドライバーの操作を懐深く受け止めてくれるから、それを信じて、「今度はどうだ」「おお、いいね」と楽しいキャッチボールが続き、どんどん気分が盛り上がる。
コアバリューの活動が始まったタイミングの関係で、現行CR-Vにはその考えや技術は入っていない。ヴェゼルには「意のままに操れる楽しさ」を実現するコアバリューの技術が一部入っており、シビックも同様だ。滑りやすい雪の上で楽しさが存分に味わえるのだから「ドライだって……」と、期待が高まる体験だった。