![「ターボラグを解消するための手段・スカベンジング[内燃機関超基礎講座]」の1枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/02/big_main75624_20200623065553000000-150x150.jpg)
![「ターボラグを解消するための手段・スカベンジング[内燃機関超基礎講座]」の2枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/03/big_4615714_202006230652170000001-150x150.jpg)
![「ターボラグを解消するための手段・スカベンジング[内燃機関超基礎講座]」の3枚目の画像ギャラリーへのリンク](https://motor-fan.jp/tech/wp-content/uploads/sites/5/2022/03/big_4615716_202006230652540000001-150x150.jpg)
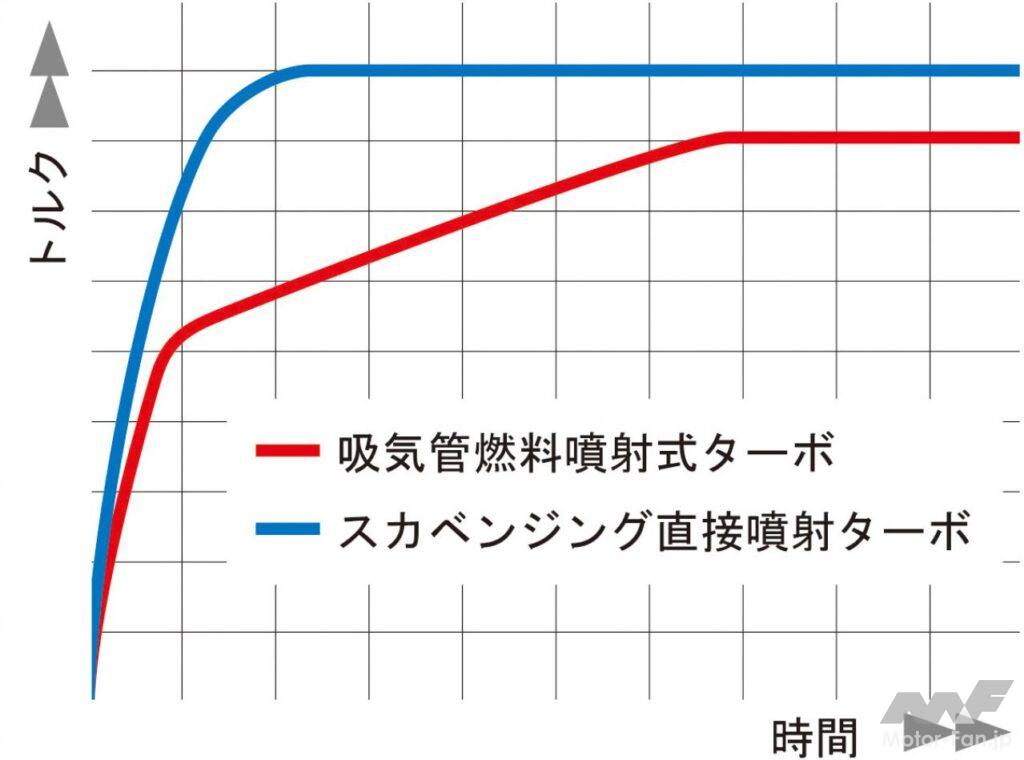
低回転域のレスポンスを向上させると同時にトルクを増大させるスカベンジング自体は新しい考えではないが、定常では機能させることはできても、実際の道路上で機能させることは難しい。
まずはスカベンジングのメカニズムからおさらいしておこう。高速道路の走行車線、追い越し車線が混雑していて追い越しのタイミングを逃してしまった。そこで、アクセルペダルを戻し、速度を調整する。追い越し車線にスペースができたタイミングを見計らってアクセルペダルを踏み込んだ際、ドライバーが期待するのは瞬時の加速だが、実際には応答遅れが発生する。
排ガス流量が十分ではなく、タービンは駆動するがターボチャージャーは吸気管にわずかな吸気量しか供給できない。その結果、シリンダー充填効率が高まらないからだ。アクセルを踏み込み続けるとようやくタービン回転数が上昇し、過給圧が高まってトルクの増加に結びつく。
応答遅れの原因はシリンダー内の残留ガスで、これが新気の流入を邪魔している。それを解決するのがバルブ開閉タイミングの緻密な制御だ。吸気管の圧力が排気管の圧力より高くなるタイミングを利用し、吸排気バルブをわずかな期間だけ同時に開くようにコントロール。すると、新気が残留ガスを押し出し、新気の充填効率を高める(筒冷却効果もある)。
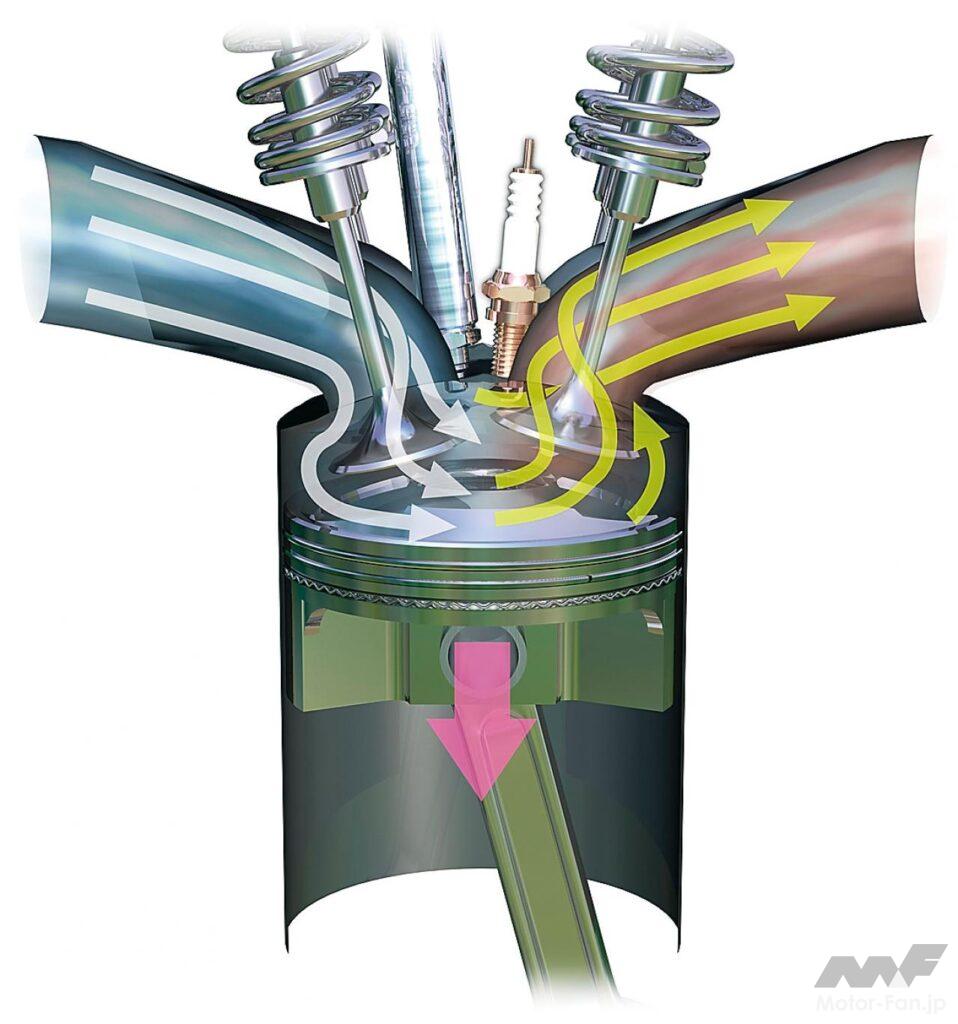
上のイラストは新気が残留ガスを押し出すスカベンジング中を表した状態。吸気行程の初期に、排気バルブも開く。シリンダー内を冷却すると同時に、新気の充填効率を高める。スカベンジングを成立させるには、吸気管内の圧力が排気管内の圧力より高くなることが前提。
残留ガスを押し出したことにより、温度が低くなったシリンダー内により多くの新気が導入される。ポート噴射では吸気行程のオーバーラップ時に燃料が排気管に流れ出てしまうが、直噴ならその心配はない。吸気バルブは早閉じして、吸気の逆流を防ぐ。
スカベンジングは、直噴、ターボ、可変バルブタイミングの3つのデバイスをそろえれば適用可能だが、要は制御だ。吸排気バルブをオーバーラップしたことでシリンダー内がどうなるのか、掃気したことでタービンを回すだけの流量に達したのかなど、シンプルなモデルを作り、そのモデルに従ってリアルタイムで計算しながら制御するなどの手段がとられる。