ウェイストゲートはどのように働いているか。ターボチャージャー今昔[内燃機関超基礎講座]





TEXT:髙橋一平(TAKAHASHI Ippey) PHOTO:Bosch MAHLE Turbo Systems
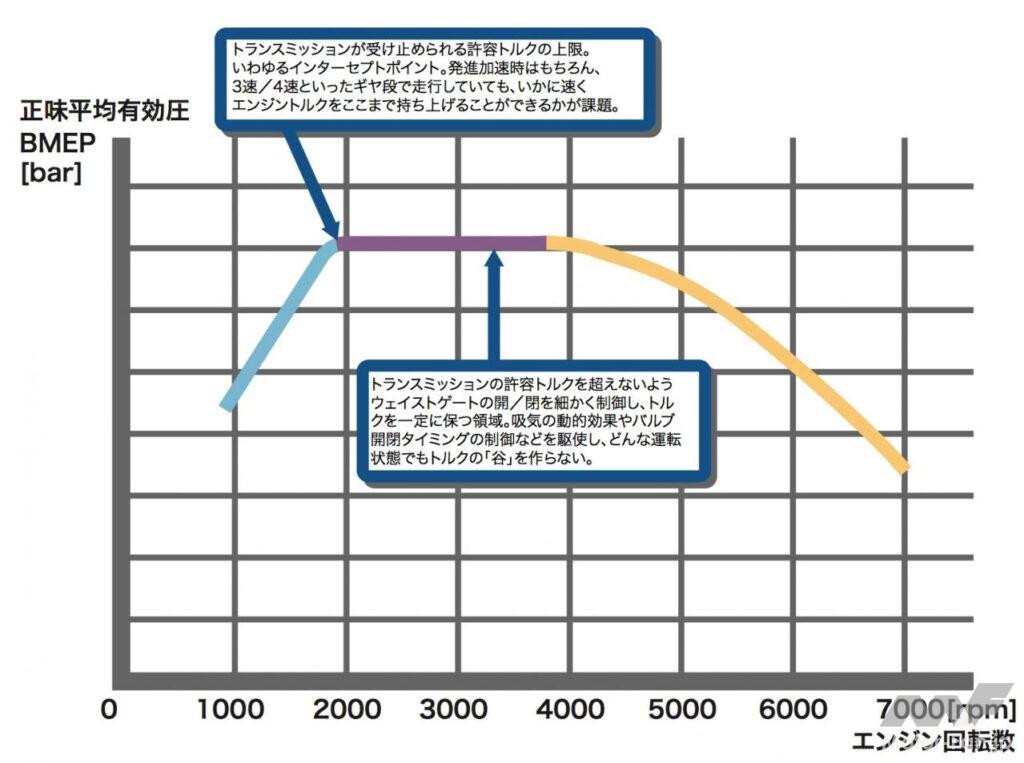
過給圧制御は、ウェイストゲートに課せられた最も重要な役割のひとつだ。過給圧が目標値に達するとウェイストゲートが開き、タービンホイールに向かうガスの流れをタービン下流にバイパス。駆動力の源となるガスの流れが減少し、タービンホイールと一緒に連れ回るコンプレッサーホイールに伝わる駆動力も小さくなり、過給圧の上昇が止まるというのが、基本的な動作だ。ただし、ウェイストゲートが制御するのは排出ガスの流れで、過給圧そのものではないため、そこには反応遅れがある。熱効率を高めるためにできるだけ広範囲で過給したいが、設定圧力を超えることは、エンジンやタービンへのダメージにつながる。この部分のせめぎ合いこそが、ウェイストゲート制御のカギだ。
ターボが自動車に採用されて間もない1980年代までは、ウェイストゲートの制御というと、過給圧によって作動するダイヤフラム式アクチュエーターを利用するという方法以外に選択肢がなかった。制御対象となる過給圧を利用するという手法は合理的ではあったが、圧力によってダイヤフラムが徐々に動作し、過給圧が目標圧力に達する前からウェイストゲートが開き始め、排ガスの流れを逃がしてしまう。結果として過給の立ち上がりは緩慢になり、ターボラグの一因にもなっていた。

1990年代に入ってもダイヤフラム式は踏襲されていたが、ダイヤフラムに導かれる過給圧が制御されるようになる。過給圧を導く通路にソレノイドバルブを置き、PWM制御でコントロールしたのだ。内径数ミリのパイプで導いた圧力を利用していたので、反応速度はそれなりだったが、ギヤポジションに応じて最大過給圧を使い分けるという制御も可能になり、過給の立ち上がりも幾分か改善されることとなった。
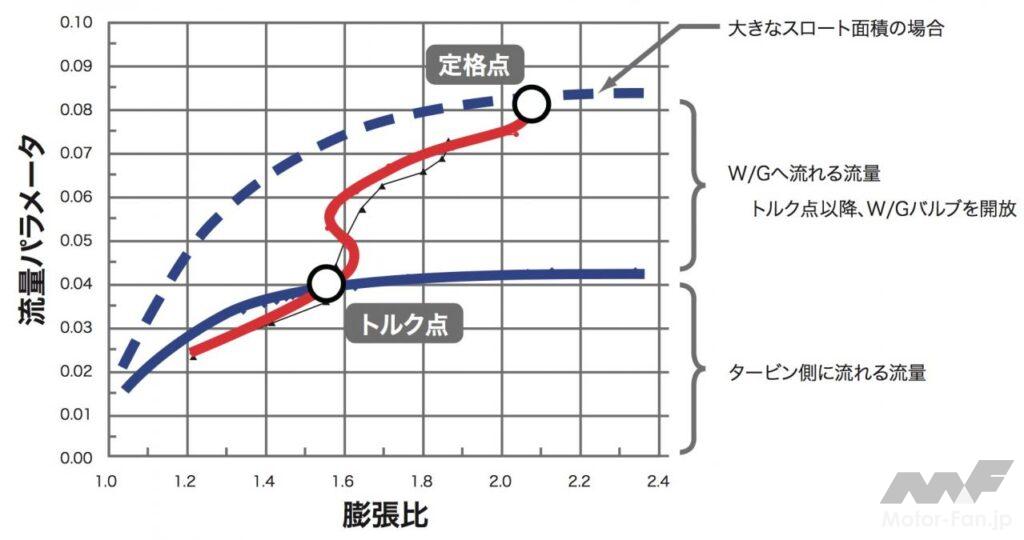
2000年頃になると電子制御式のサーボモーターを用いる電動ウェイストゲートが登場。反応時間も大幅に高速化。ギリギリまでウェイストゲートを閉じたまま“我慢”することで過給圧も素早く立ち上がるようになった。その自由度を活かし、ディーゼル用のVGターボでは、排圧制御という新たな制御も生み出している。過給圧に依存せずに、完全に自由なタイミングで制御が可能な電動ウェイストゲートは、今やターボエンジンの制御に必要不可欠な存在だ。
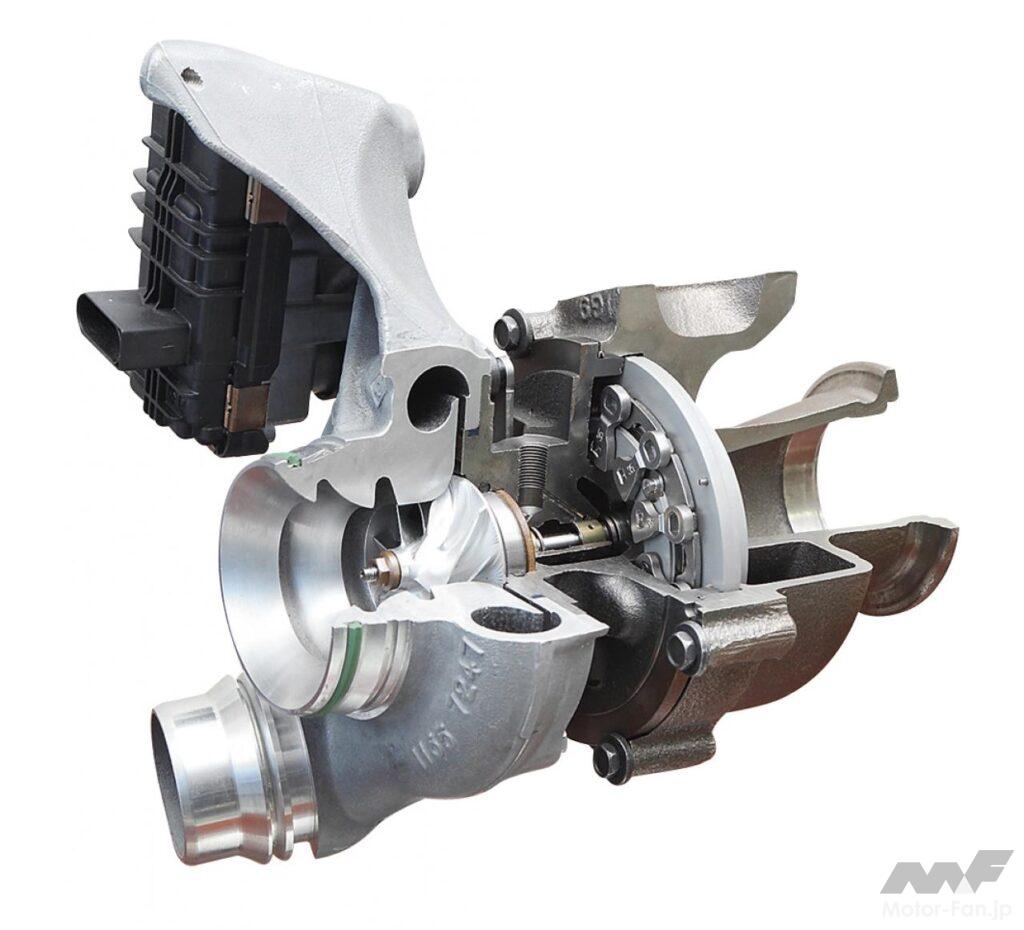
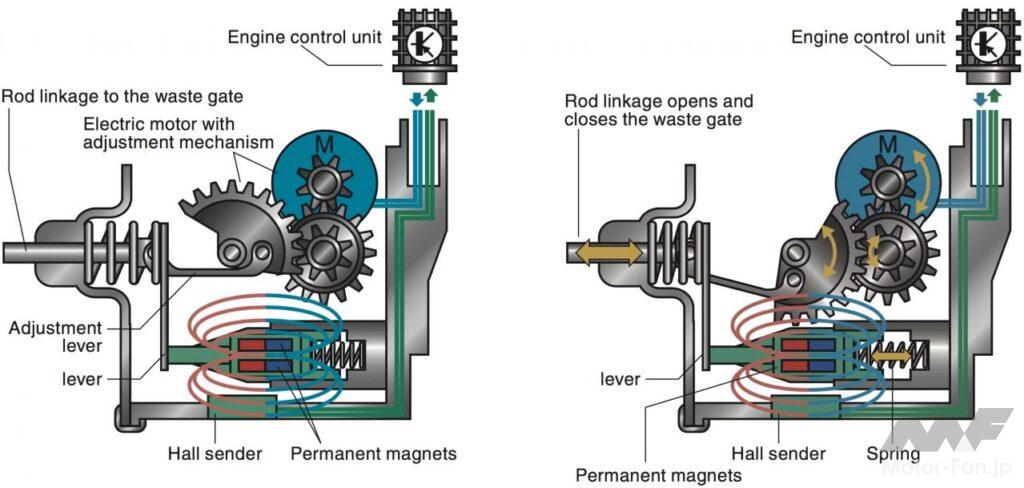
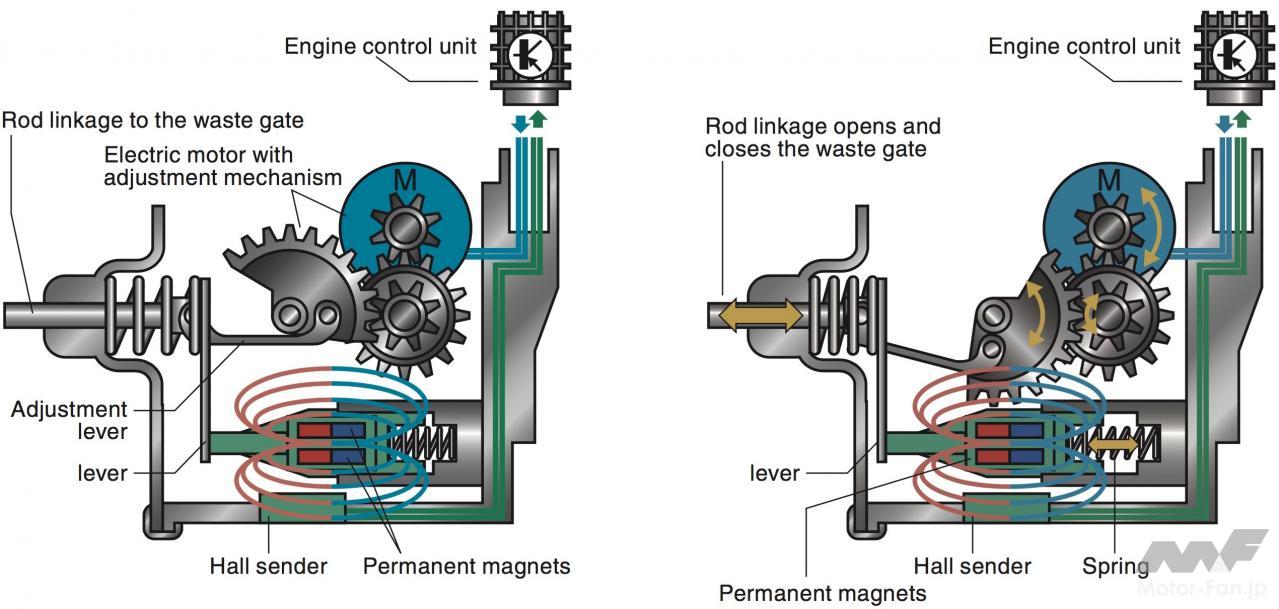
近年増えつつある、電子制御式のサーボモーターを用いる電動ウェイストゲートは、過給圧力に依存することなく作動するために自由度の高い制御が可能。ダイヤフラム式が高まる過給圧によって目標圧力に達する前から徐々にウェイストゲートを開いてしまうのに対し、電動式は目標圧力に届く直前まで閉じておくことが可能で、(ダイヤフラム式と比べ)反応速度も圧倒的に速い。
電動ウェイストゲートに用いられるサーボには、熱などの影響を考慮し、シンプルなDCモーターが使われる場合が多い。センサーを用いて開度を検出しながら駆動電流を制御する。下は開度検出にホールセンサーを利用する例。