
「接近注意」歩行者のスマホに警報を通知して飛び出しを防ぐ!【ホンダの先進安全技術大公開・その5】












TEXT●安藤 眞(ANDO Makoto)
すべての交通参加者が通信でつながる安全・安心ネットワーク技術
2050年交通死亡事故ゼロを達成するため、ホンダは三つの方向からアプローチを行う。一つ目は、車両自身の安全性向上、二つ目は、すべての交通参加者の安全意識向上、三つ目は、社会インフラを利用した安全技術の開発だ。
“安全・安心ネットワーク技術”は、このうちの3番目に対するアプローチ。通信技術を利用して、ドライバーだけでなく、歩行者にもリスクの高まりを通知するもので、すべての交通参加者が協調して事故回避を行うことを目的としている。
クルマと歩行者の事故が起きる要因として最大のものは、ドライバー側は前方不注意、歩行者側は安全不確認。双方ともリスク対象から意識が逸れているため、お互いが視認できる位置でも事故は起こりうる。
危険歩行者の位置を特定してクルマ&スマホの両方に警報を通知
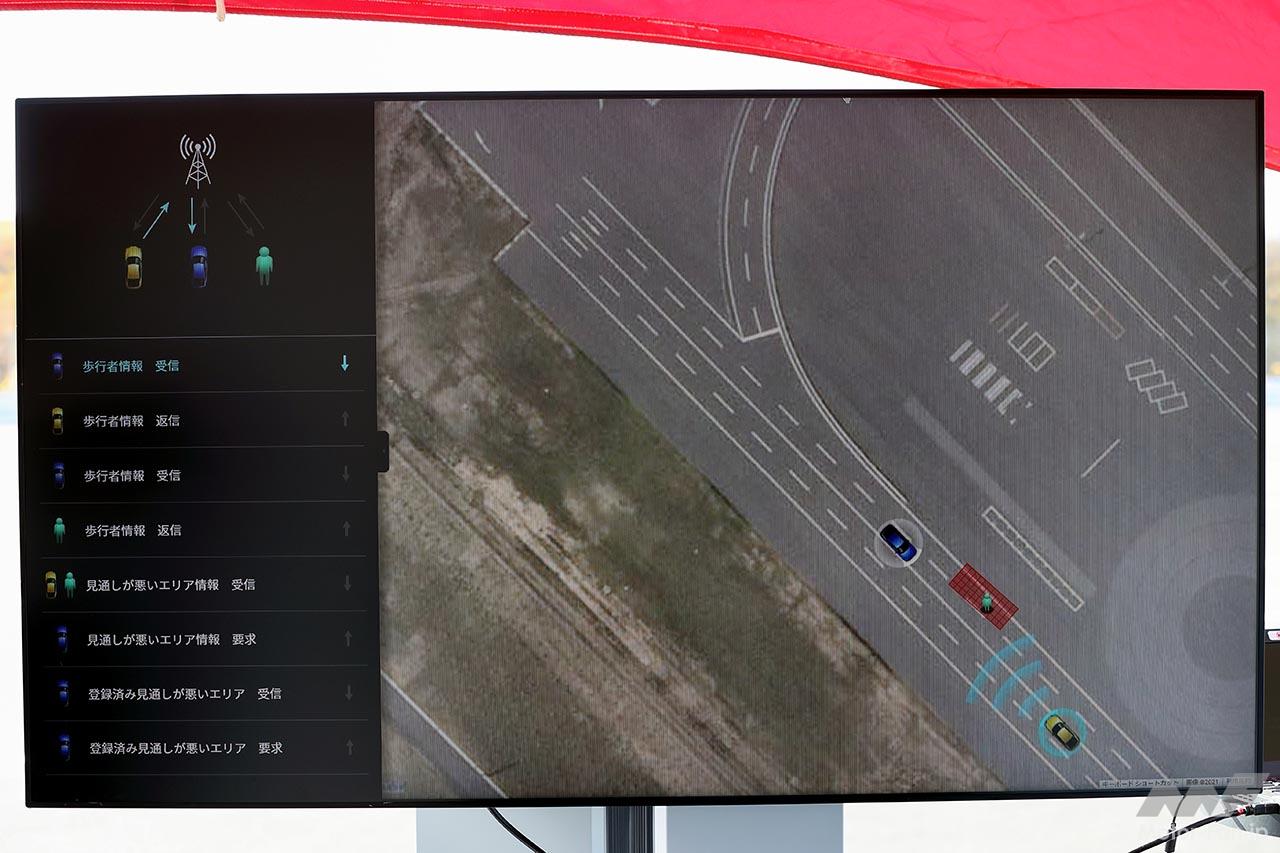
そこで、車載器と歩行者のスマホ間の通信を利用。ADASのカメラで歩行者が捉えられていれば、歩行者の端末から位置座標を特定してリスクを判定。衝突のリスクがある場合、双方の端末に警報通知を行う(スマホには専用のアプリをインストールしておく)。


お互いが目視できない位置にいる場合には、対向車からの情報を利用する。駐車車両等で見通しが悪くなっている場所を随時サーバーに挙げておき、自車がそのエリアを通過する際に対向車がいれば、対向車のADASカメラから得られる情報も利用してリスクの判定と通知を行う。


飛び出す? 飛び出さない? AIが歩行者・自転車の動きを先読み!
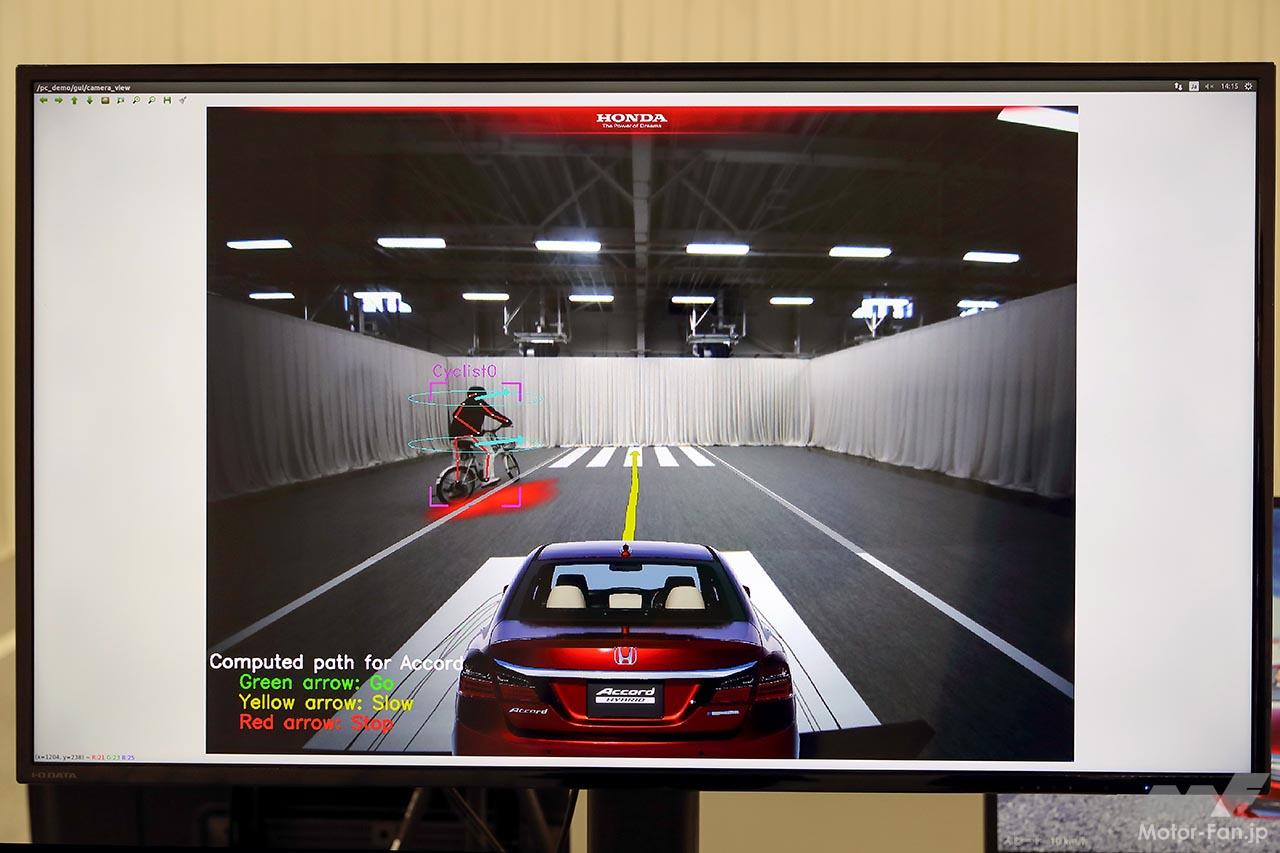
もうひとつは、ADASのカメラ情報からリスクを予測する技術。たとえば前方に駐車車両があり、同方向に進行する自転車がある場合、自転車は駐車車両を避けるために自車の前に出てくることが予想される。これをカメラの画像情報から推定する。

また、歩行者の体の向きや手足の動きを把握して、将来の動きを予測し、リスクレベルの推定も行う。AIによるディープラーニングを使用してパターンマッチングを行うため、スマホで通話しながら歩いているとか、画面を見ながら歩いているなども腕の形から推定が可能。現在では“人”と認識するのが困難な交通参加者(車椅子利用者やベビーカーを押した人、前後に長い荷物を持った人や、手足が見えにくい民族衣装を着た人など)の認識も可能になるそうだ(ただし道路に横たわってしまうと、デモ機では認識できなくなった)。
デモンストレーションでは、リスクレベルに応じて、そのまま進行するか、ステアリングで回避するか、減速・停止するかをCG画像上に矢印の形と色で表示していたが、実際にこのデータをどう実車に反映していくかは、検討を進めているところだそうだ。




さらに、これらの情報をサーバーに集約し、仮想空間に再現。将来の行動予測からリスクの予兆を抽出し、回避策を導出し、各交通参加者の端末にリスク情報を送信することで交通事故ゼロを実現する。そこまで考えているのが、ホンダの“安全・安心ネットワーク技術”だ。









