
目次
開発した無線電力伝送システムは、ロボットの関節部において無線で電力を送ることで、電力配線のねじれや摩耗による断線故障のリスクを軽減することができる。さらに、ロボットのモータ、センサの動きに対して特別な制御(注2)を用いることなく一定電圧を供給し続けることに成功している。
この成果は、無線電力伝送システムにおいてその構造を簡素化するための基礎技術となり、今後の無線電力伝送システムの社会実装に向けて、多様なアプリケーションへの展開が期待される。
なお、本研究成果は、電子情報通信学会電気通信エネルギー技術研究会にて発表される。
研究背景
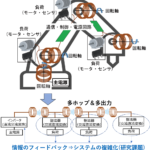
無線電力伝送は電力を電界、磁界を介して送電する技術であり、電池への充電、モータやセンサを駆動する電力を供給することを目的とする。最近ではスマートフォンの「置くだけ充電」などで実用化されている。多くの身の回りの電気電子機器が無線化される中、電化製品の電源プラグや充電ケーブルなどの電力配線は最後に残された「有線」であると言われている。無線電力伝送が実現されれば、かつての通信の無線化と同様のインパクトを社会に与えることが期待され、社会実装のためにはフレキシブルな設計・実装技術の確立が求められる。そのなかで、近年一つの送電器から複数の電子機器に給電する多出力システム、中継器を使い多段(多ホップ)に電力を伝送することで伝送距離を延ばす多ホップシステムの開発が精力的に進められている(図1)。
無線電力伝送においては、出力制御のための情報のやりとりも無線で行う必要があり、その伝送遅延(注3)による性能劣化が問題となっている。また、多出力システムではその制御のために多くの情報をやりとりする必要があり、システムの複雑性が増大してしまう問題もある。
課題解決のアイディア
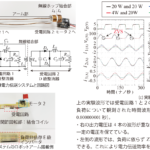
本研究では、一定の電圧を出力するロボットアーム向け多ホップ多出力無線電力伝送システムを開発した。まず、負荷変動(注4)に対して一定出力と高い電力伝送効率(注5)を制御装置を用いることなく常に実現する「負荷非依存動作」の設計論を構築した。構築した設計論は低周波数からISM帯(注6)高周波数まで幅広く適用可能であり、高い一般性と汎用性を有している。
この設計論に基づき、具体的に2ホップ2出力の6.78MHz無線電力伝送システムを設計し、実験結果から、負荷変動に対し一定出力と高効率を維持できることを確認した(図2)。今後、多様なアプリケーション向けに、負荷非依存動作を搭載した無線電力伝送システムを設計できるようになる。
今後の展望
本研究成果は負荷変動に対し制御システムを不要にできることを示唆しており、システム複雑化の問題を抜本的に解決できる技術となる。これにより、設計が簡素化されると共にコストを下げることができ、無線電力伝送システムの社会実装が加速されることが期待される。本研究成果は、無線電力伝送システムにおいて、あらゆる制御を不要とする「制御レス無線電力伝送システム」実現に向けた第一歩で、千葉大学は今後、その他のアプリケーションに対してもシステムの適用を目指していく。
(注1)ホップ: 二つのコイルの間に生じる電磁界により、線を「跳び越えて」電気を送る。これをホップと呼ぶ。2ホップは充電先にたどり着くまでに2回コイルを通過する。
(注2)制御: ある目的(今回は一定電圧を維持すること)のために、システムに必要な操作を加えること。
(注3)伝送遅延: 通信において情報を送るために必要となる時間。一般的に無線通信では有線と比較して非常に大きい伝送遅延が発生する。
(注4)負荷変動: 電力供給の目的である電池やモータ、センサなどを「負荷」と呼ぶ。これら負荷は時々刻々と必要電力量が変化し、そのことを負荷変動と言う。
(注5)電力伝送効率: 電力伝送の仮定における電力損失量を量る指標。高いほど損失量は小さい。
(注6)ISM帯周波数: Industrial Scientific and Medical Bandの略。6.78 MHz、13.56MHz、27.12MHzなど無線電力伝送にとっては設計が難しい高い周波数であるが、免許不要で利用できる利点がある。