制動時と加速時の力の釣り合い[モーターサイクルの運動学講座・その3]


ここではいきなり姿勢変化を考える前に、姿勢変化を起こす力が接地点にどう入り、どう釣り合っているのかを考えます。
TEXT&FIGURE:J.J.Kinetickler ILLUSTRATION:Mick Ofield
後輪だけブレーキをかけた場合

MCはライダーが右手右足を使って前後のブレーキ配分を自由にコントロールできます。
この図は後輪だけにブレーキをかけた場合の力の釣り合いです。重力加速度と静止時の路面反力は地球上では一定なので省略します。省略して考えても全く問題ありません。
制動力が後輪の接地点に加わり、その反力として重心(車体+ライダー)に前向きの慣性力(質量のある物体がその速度を維持しようとする力)が生じます。制動力と慣性力は向きが逆で重心の高さだけ上下にずれているので、それに釣り合わせるため荷重移動※1します。
フロントの接地荷重は増加し、リヤの接地荷重は減少します。
これらの作用と反作用の力は重心の高さ、前輪の真上の「合力点」で釣り合います。文章にすると難しそうですが、図を見るとよくわかると思います。
では図を順番に見ていきましょう。この場合、前輪には制動力は働かないので前輪接地点には荷重移動の路面反力だけが加わります。それを上向きの垂直のベクトルで表しています。
後輪は制動力を後ろ向きのベクトルで表わし、荷重移動の減少を下向きのベクトルで表しています。後輪の2つのベクトルを「足し算」し前輪の真上まで「移動」させます。
この「釣り合いの合力点」で3つの力が見事に釣り合ってゼロになります。本当は見事に釣り合うというより、釣り合うように荷重移動しているのです。
制動力を強めても弱めても、後輪だけでブレーキを掛けている限り、この釣り合い位置は変わりません。後輪だけに制動力を強く掛けると簡単に後輪がロックしスリップを始めます。制動力を強くすればするほど後輪の垂直荷重が減ってしまうので耐えきれずスリップしてしまうわけです。
※1 荷重移動の大きさは以下の式で表せます
荷重移動(⊿W)=制動力×重心高(H)÷ホイールベース(L)
前輪だけブレーキをかけた場合

次は前輪だけにブレーキを掛けた場合の力の釣り合いです。
制動力が前輪の接地点に加わり、その反力として重心(車体+ライダー)に前向きの慣性力(質量のある物体がその速度を維持しようとする力)が生じます。
制動力と慣性力は向きが逆で重心の高さだけ上下にずれているので、それに釣り合うように荷重移動がおこります。フロントの接地荷重は増加し、リヤの接地荷重は減少します。
これらの作用と反作用の力は重心の高さで、こんどは後輪の真上の「合力点」で釣り合うことになります。
では図を順番に見ていきましょう。この場合、後輪の制動力は働かないので後輪接地点には荷重移動の路面反力だけが加わります。それを下向きの垂直のベクトルで表しています。
下向きのベクトルに違和感があるかも知れませんが「接地荷重が減少する」というのを下向きのベクトルで表します。
前輪は制動力を後ろ向きのベクトルで表わし、荷重移動の増加を上向きのベクトルで表しています。後輪の2つのベクトルを「足し算」し後輪の真上まで「移動」させます。
この点が「釣り合いの合力点」で3つの力が釣り合ってゼロになります。本当は見事に釣り合うというより、釣り合うように荷重移動しているのです。
制動力を強めても弱めても、前輪だけでブレーキを掛けている限り、この釣り合い位置は変わりません。前輪だけに制動力を強く掛けてもなかなかスリップしません。制動力を強くすればするほど前輪の垂直荷重が増えるのでなかなかスリップしないわけです。
路面とタイヤの摩擦係数が高い場合、最後までスリップせずにジャックナイフ(後輪が浮き上がる現象)になる場合もあります。
前後ともブレーキをかけた場合

それでは前後のブレーキを、あるバランスでかけるとどうなるのか考えてみましょう。クルマと違ってMCは、前後の制動力配分は0:100から100:0までライダーが自由に決めることができます。
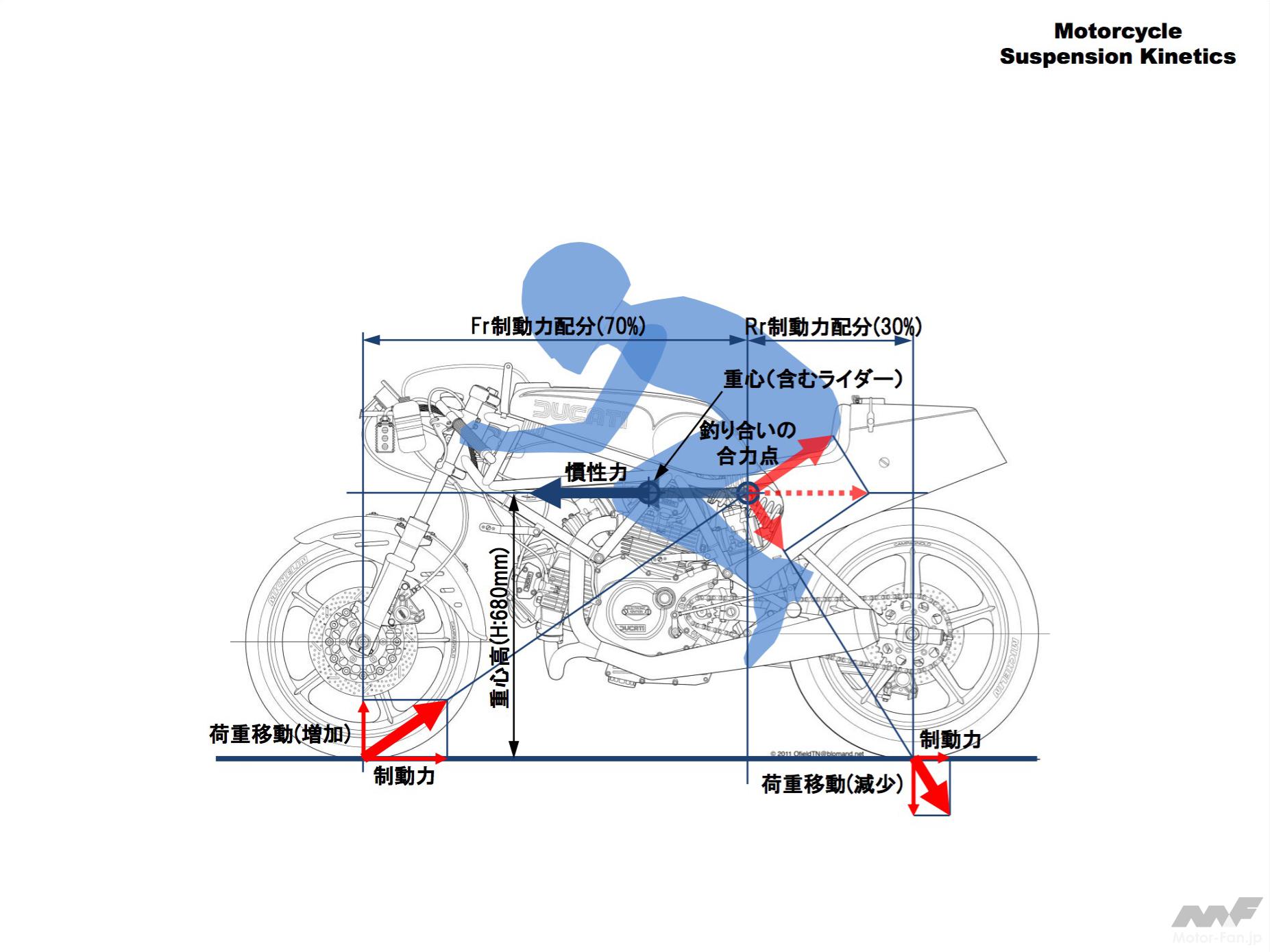
たとえばこの図は前輪に70%、後輪に30%の割合で制動した場合です。
この場合、制動力の前後配分の割合で前輪にも後輪にも制動力が生じます。前後を合計した制動力と等しい慣性力(質量のある物体がその速度を維持しようとする力)が重心に発生します。
この時の釣り合いの合力点は重心の高さでホイールベースを制動力の配分の割合で分割した点になります。この合力点と前後輪の接地点を直線でつなぐと図のようになり、やはり制動力と慣性力、荷重移動が釣り合います。前後トータルの制動力が同じなら荷重移動の大きさも同じです。
ちょっと頭が混乱しそうですが、前輪だけブレーキをかけたら合力点は後輪の真上、後輪だけなら前輪の真上、前後を50:50の割合で掛ければホイールベースの中央、前輪70%、後輪30%の場合はこの図のようにホイールベースの前輪から70%のところが合力点…というように順に考えていくと納得できませんか?
任意の制動力配分での合力点は重心の高さで前後はホイールベースを制動力配分の割合で分けたところになります。ひとつ注意してほしいのは合力点は重心とは違うということです。
今までの説明で十分わかっていただけたと思いますが、結構権威のある雑誌やウェブサイトでも重心で作図している場合があります(大抵はブレーキ配分が自動的にきまるクルマの場合ですが…)。
加速時の力の釣り合い

次は加速しているMCの力の釣り合いです。
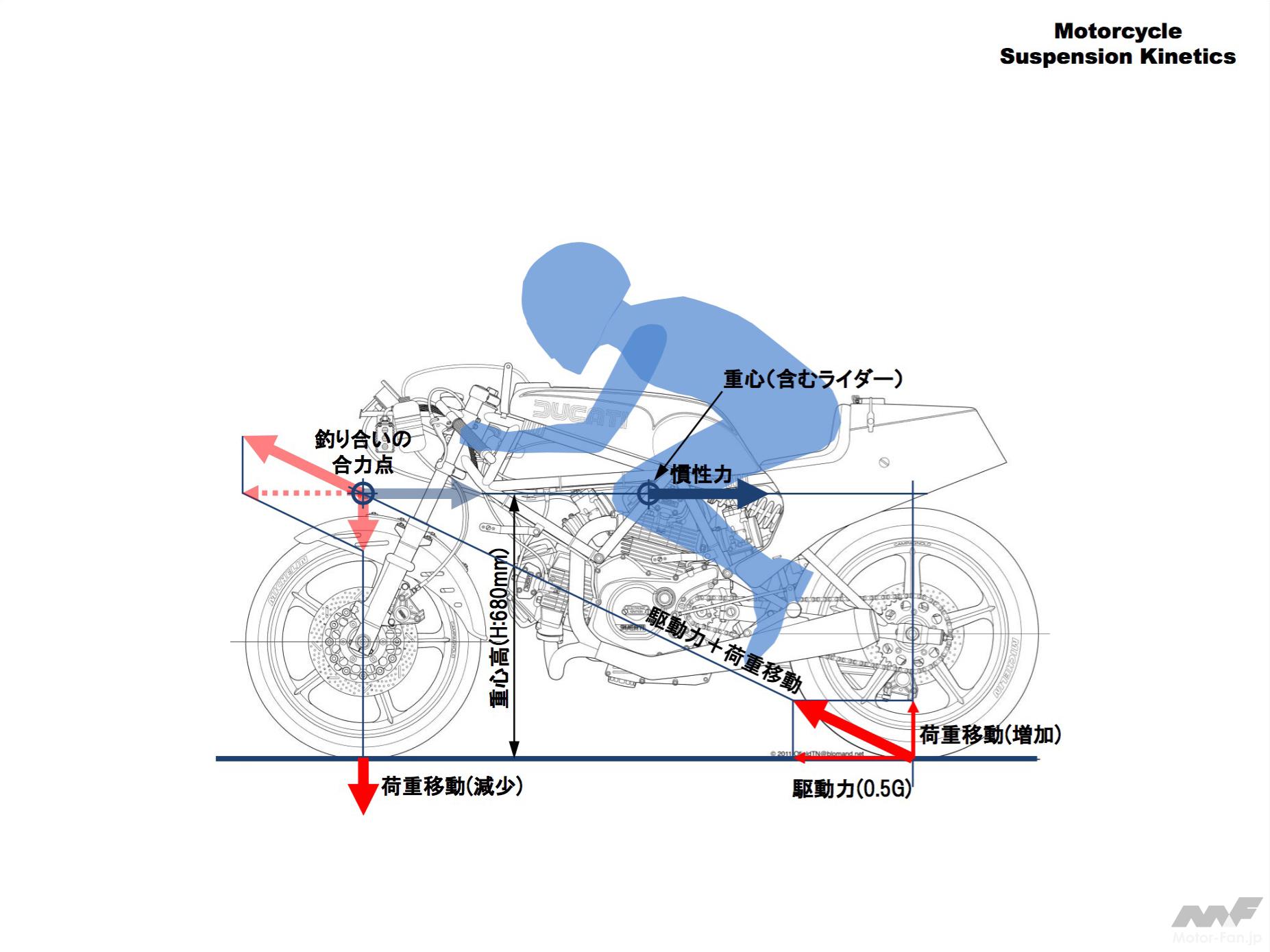
加速すると後輪の接地点に駆動力が加えられ、重心には逆向きの「慣性力」(質量のある物体がその速度を維持しようとする力)がはたらきます。
駆動力と慣性力は向きが逆で重心の高さの分だけ上下に位置がずれているので、それと釣り合うように接地荷重が変わります。具体的には後輪荷重が増加し、前輪荷重はその分減少します。
これをベクトルで表すと図のようになります。後輪には駆動力と接地荷重の増加が加わり、前輪は接地荷重が減少します。
(毎度わかりにくいのですが前輪の荷重が減少するというのを下向きのベクトルで表わします)
前輪の荷重移動(減少)、後輪の駆動力と荷重移動(増加)を合わせた力、重心に働く慣性力の3つの力は重心の高さ、前輪接地点の真上の一点で交わり釣り合います。この点を「釣り合いの合力点」と呼びます。
この釣り合いは後輪にだけブレーキを掛けた場合に大変よく似ていますが、すべてのベクトルの向きが逆になっています。
加速する場合は制動する場合と異なり、前輪駆動(むかしSolexという前輪駆動のモペッドがありました)や2輪駆動(たぶんない……ごく少数市販されてたかも?)でもない限り、この釣り合いのパターンしかありません。
興味がおありになれば前輪駆動や2輪駆動のMCの加速時の力の釣り合いを考えてみてください。ヒントはすべて制動時の釣り合いの中にありますが、注意することはベクトルの方向が全て逆になることです。






