
NEDOが既存生産ラインの柔軟・迅速な組み換えや制御が可能なパイロットラインを整備
ダイナミック生産ラインの概要
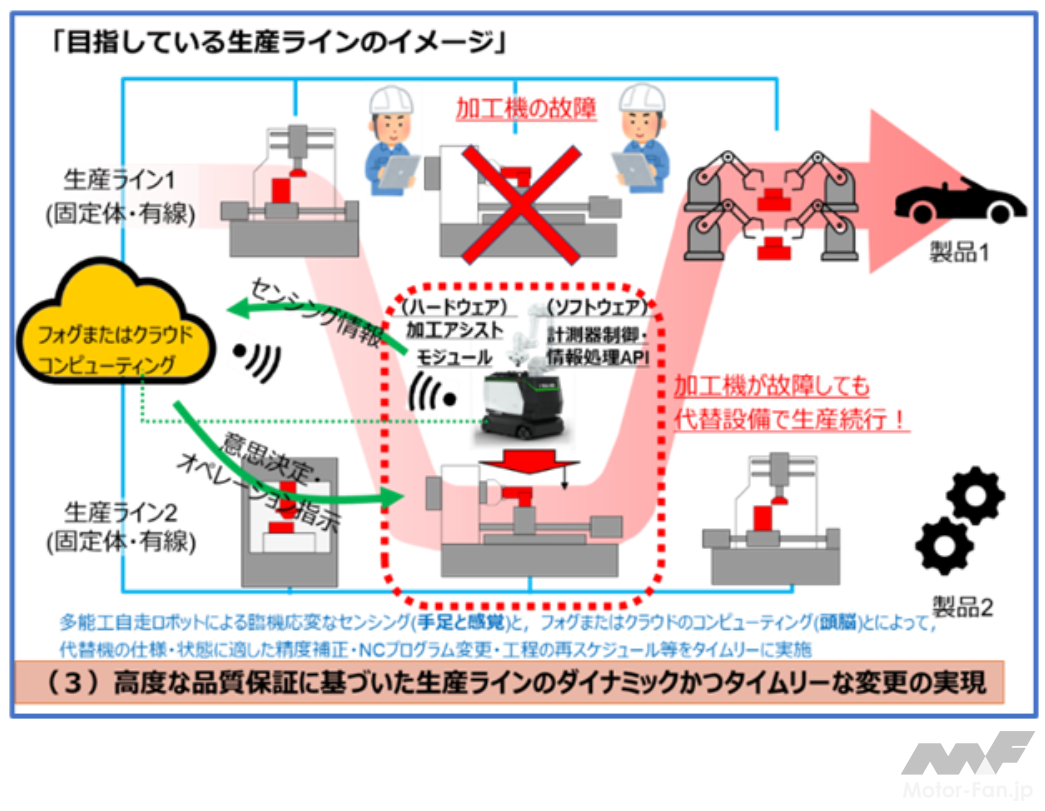
本事業では、多能工自走ロボットと生産設備間のクラウド型無線協調制御プラットフォームと既存生産設備に適応した加工アシストモジュールが高速通信規格のローカル5Gを通じて組み合わせられている。これにより、未来の生産ライン(1台の多能工自走ロボット導入で、ライン寸断や設備故障などが生じた際にもロボットアシストと動的ライン変更により生産活動を維持できるライン)の追求と実用化に向けた普及施策(中小企業におけるユースケースごとの導入ステップや効果的な活用方法の事例蓄積など)の実証環境が整備された。これにより、生産ラインで既存生産設備が故障した際に、自動的に代替生産設備を使って当該部品を製造し、サプライチェーンの寸断を回避する技術の確立が目指される(図2)。
具体的には、代替として全く同じ機械・機種の生産設備がなかった場合は、その瞬間に仕事が入っていない他の生産設備を自動的に選ぶことができる。多能工自走ロボットが「手足・感覚」として選んだ設備の挙動を計測し、センシング情報を受け取り、「頭脳」として代替設備の状態に適した精度補正などを実施する。
本技術により、選ばれた生産ラインがダイナミックかつタイムリーに組み換えられることで、高い品質保証を実現しつつ、当該部品を製造し続けることができる。その間に元のラインを修理することで、生産ラインの緊急事態を乗り切り、サプライチェーンの寸断を回避することができる。

パイロットラインの各設備概要と個別実証成果
(1)多能工自走ロボット
多能工自走ロボットが扱う加工工程の順序、動作経路計画に基づいて自律走行を行い、多能工自走ロボットのハンドに搭載した各種の計測器から、無線を使ってネットワークストレージにデータを蓄積する。
(2)クラウド型無線協調制御プラットフォーム
多能工自走ロボットにIoTゲートウェイを搭載し、高度な計算処理を実行するためのサーバーとWi-Fi 6またはローカル5Gを経由した無線通信によりデータの送受信を行う。
(3)NC連携システム
多能工自走ロボットを各種情報の入力ユニットとし、固定ロボットおよびNC加工機を出力ユニットとするフィードバック系を構築、多能工自走ロボットで取得した加工対象物(ワーク)情報およびプロセス情報について、実際にプロセスを行う加工機へネットワークを介して送る。その際、CNC(Computerized Numerical Control)※1やロボットコントローラーのメーカーや世代間の差を意識することなく使えるという共通かつオープンな仕様に基づいて構築されている。
(4)各加工アシストモジュール
【1】3D(3次元)プリンターモジュール
3Dプリンターモジュールは、温度情報などの機内測定、3Dスキャナーおよび超音波非破壊検査装置による詳細形状やクラック情報の取得など各機能を提供するものである。実証では3Dプリンターで造形したワークの強度と積層条件についてデータ解析を用いて、必要なデータ領域の特定を行いさまざまな積層条件で造形し、取得したデータを回帰分析して、要求性能を満たす積層条件の算出に成功、不良品の流出なしに試作だけでなく量産も行えることが確認された。
【2】ターニング加工モジュール
ターニング加工モジュールは、ビジョンセンサー※2による画像解析により、機械学習を用いた切りくず堆積特定を行うものである。実証では多能工自走ロボットのハンドに取り付けたビジョンセンサーによりNC旋盤の加工空間をモニタリングすることで切りくず堆積を検知し、ハンドやエアを用いて自動的に切りくずを除去することにより、作業の中断・停止なしで生産を継続できることが確認された。
【3】ワーク形状計測-加工パス生成モジュール
ワーク形状計測-加工パス生成モジュールは、3Dスキャナー装置によりワークの走査を行い、加工パスを生成するものである。実証では多能工自走ロボットのロボットアームを効率よく動かし、ハンドに搭載した3Dスキャナー装置で対象ワークの走査を短時間に完了し、加工パスを生成するという一連の手法が確認された。CAM(Computer Aided Manufacturing)※3ソフトウエアのパラメーター最適化を行い、複雑形状でもワークを固定する専用ジグなしで造形品の仕上げ切削が実現される。
【4】熱変形推定モジュール
熱変形推定モジュールは、光コム※4を用いた光学計測により計測データの信号処理、統計処理を実施することでワークの寸法を計測するものである。実証では多能工自走ロボットのハンドに搭載した光コムで加工機のジグを計測することで寸法が正確に算出できることを検証し、熟練技能なしで設備の精度点検が可能であることが確認された。
【5】ビジョン振動解析モジュール
ビジョン振動解析モジュールは、高速カメラと発光体マーカーの使用によりノイズを低減、画像処理による変位計測システムを構築するものである。実証では多能工自走ロボットのハンドに搭載した高速カメラによる加工機の撮像で、残留振動から固有振動数を抽出できることを検証し、センサーを設置することなく、加工機の振動点検が可能であることが確認された。
今後の予定
今後は、ローカル5G、クラウド、連携システム、多能工自走ロボットがすべてそろったパイロットラインに構築したフルスペックのシステムが、サプライチェーンの寸断と生産設備の故障の両方のケースに対応可能であることを実証するため、多能工自走ロボットの最適経路プランニングの確立と加工アシストモジュールの拡充と精度向上に取り組まれる。
また、パイロットラインにおいて一品種複数個の疑似製品の製造を行い、開発システムの効果によるMTTR(Mean time to repair)※5と単位時間当たりの生産量を、複数通りの故障シナリオ、加工アシストモジュールの組み合わせにより比較評価が実施される予定です。さらには、従来技術水準ではダウンタイム3日程度を要する生産ラインの復旧に対して、1日(8時間)以内で復旧して生産再開し、部品精度の担保を実証する予定。
【注釈】
※1 CNC(Computerized Numerical Control):
加工工程にコンピューターを利用して数値制御する方法のことです(NC工作機械より自動化のレベルを進めたものです)。
※2 ビジョンセンサー:
カメラが撮影した画像をキャプチャして、対象物の特長を判定し、それに対応する動作をトリガーするための装置です。
※3 CAM(Computer Aided Manufacturing):
工作機械を操作するための加工プログラムを作成するソフトウエアです。
※4 光コム:
光を櫛(くし=Comb:コーム)の歯列状の周波数スペクトルに分解したもので、光周波数コムともいいます。
※5 MTTR(Mean time to repair):
平均復旧時間(または平均修復時間)のことで、製品の故障またはシステムの故障からの復旧にかかる平均時間です。





