

JFEスチールは、労働生産性のさらなる向上を目指し、作業のリモート化や自動化ロボットの活用に取り組んでおり、複雑作業や危険作業などの負荷の高いものを中心にロボットの導入を推進している。製鉄プロセスにおいては、鉄鉱石や石炭など粉体を含む素材を扱う設備が一部あり、粉じんを風によって周囲に飛散させないよう、集塵機の設置や定期的な設備周辺の粉じん清掃作業などの環境対策を実施している。
製鉄プロセスにおける清掃作業は人手により実施されているが、高温の設備付近における作業は負荷が非常に高い。このような環境下でロボットを用いる場合、ロボット内部の電子基板の損傷を防ぐための冷却機構が必要となるが、一般的な冷却機構である換気ファンを設置すると粉じんを飛散させたり、吸引して内部機器を損傷させたりしてしまうリスクがあり、高温環境などの難条件下におけるロボット活用が課題となっていた。
そこでJFEスチールは、高温環境にも対応可能な内部冷却機構を独自に開発し、自走式ロボットに新たに組み込んだ。まず外部からの熱を遮断するための断熱材をロボット内面に設置し、さらにロボット内部の制御機器などから発生する内部発熱に対して、内部冷却機構として樹脂材料や水などが気化する際の相変化※1による吸熱を応用した独自機構を搭載することで、内部の電子基板を熱により損傷することなくロボットを連続稼働させることが可能となっている。
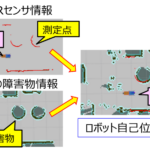
また、ロボットが自走するための「目」として、周囲や障害物との距離を測るLiDAR※2センサを搭載し、自己位置認識システムとしてSLAM※3が採用された。これにより、清掃エリア内において、ロボット自身が移動するべき目標と自己の位置の差分を認識して、目標ルート上を自動で移動しながら清掃することができる。既に製銑工程において検証耐久試験が実施されており、今後は全地区の製鉄所内各設備への展開を進めることで、粉じん清掃作業の一部自動化を実現し、作業負荷軽減と安全性・生産性の向上が推進されていく。


※1 同じ物質の状態が固体・液体・気体のように変化すること。
※2 Light Detection And Ranging(光による検知と測距)の略称、近赤外光等を対象物に照射し、その反射光を光センサでとらえるまでの時間から距離を測定するセンシング方式。
※3 Simultaneous Localization and Mapping(位置特定と地図作成の同時実行)の略称、LiDARセンサ情報を基に周囲の障害物とロボットの位置関係を把握する「地図作成」と、地図を基に自分がどこにいるのか、どっちを向いているのかということを認識する「位置特定」を同時に行う方式。