Ground Truth Perceptionとはなにか? 日産の緊急避難と自動運転技術の進化
日産の緊急避難技術がスゴイ!実現のキーは次世代LiDARを使ったグラウンド・トゥルース・パーセプション技術

















TEXT:世良耕太(SERA Kota)
自動運転の実現には、緊急回避性能を向上が必要だ

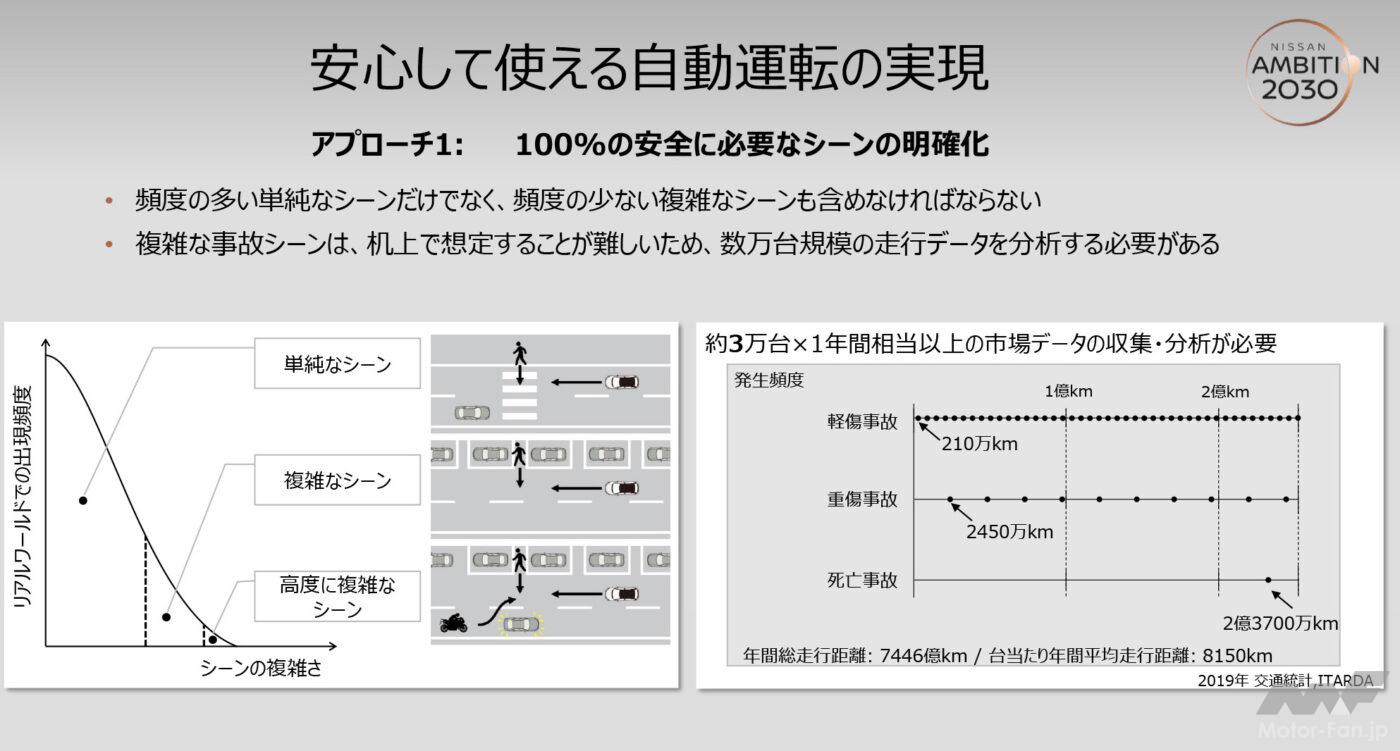
日産は「将来の自動運転の時代において、お客さまに安心してクルマを使っていただくためには、世の中で起こる多次元的に複雑な事故を回避するための運転支援技術が必須」と考えている。今回公開した技術は自動運転の技術の進化にもつながるが、「重要なのは緊急回避性能を向上させること」だと、AD(自動運転)&ADAS(先進運転支援システム)系の技術開発に携わる飯島徹也氏(日産自動車株式会社 電子制御・システム技術開発本部 AD&ADAS先行技術開発部 戦略企画グループ部長)は説明する。

「安心して使える自動運転を実現するために重要なポイントは、緊急回避性能を向上させることです。そのために何をしなければいけないのか、常日頃考えています。日産の自動運転はひと言でいうと、『ぶつからない』。乗って(クルマに)任せたら、事故は起こらない。だから、安心して使えることになる」
自動運転の機能を利用せず、ドライバーが意志を持って運転しているときも、クルマの判断で緊急回避してくれれば、安心感は高まる。しかし、自信を持って「ぶつからない」と言えるだけの技術を実現するハードルは高い。衝突回避となると、前触れもなく起こる状況を正確に把握し、瞬時に判断して操作しなければならないからだ。
ルミナー製次世代型LiDARの性能

緊急回避操作を実現するにあたってもっとも重要だったのは、技術名の一部となっているパーセプション(perception)、すなわち認識技術だと飯島氏は説明する。カメラとレーダーの性能を向上させたうえで、次世代型のLiDAR(米国ルミナー社製)を採用したのがポイントだ。LiDAR(ライダー)はLight Detection And Rangingの略で、直訳すれば「光による検知と測距」。レーザー光を照射し、物体に跳ね返って戻って来る時間から、対象物までの距離や形状を測定する装置だ。
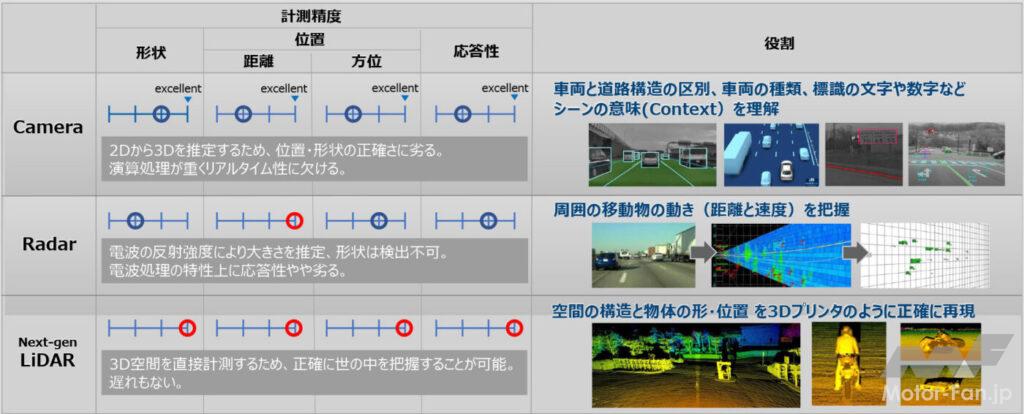
カメラは車両や道路構造の区別、車両の種類、標識の文字や数字など、目の前に広がるシーンの意味(コンテクスト)を理解するのに用いる。レーダーは電波の反射強度により、周囲の移動物の動き(距離と速度)を把握するのに用いる。
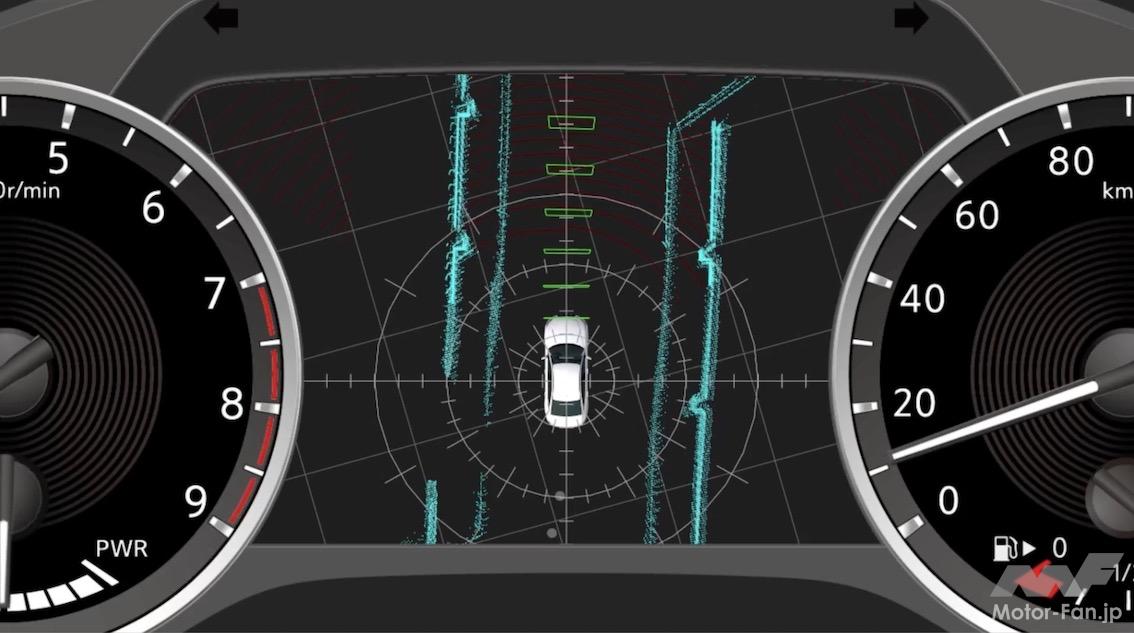
「LiDARは3Dプリンターが物を樹脂で正確に作り上げるように、外の世界を正確に再現します。モノクロの世界で、色はありません。ただし、ものすごく正確です。これにカメラのコンテクスト情報とレーダーの動きの情報を割り付けることによって、LiDARが捉えたモノクロの正確な情報は、人間の感覚に極めて近い意味のある動きの世界になります。それが、グラウンド・トゥルース・パーセプション技術です」
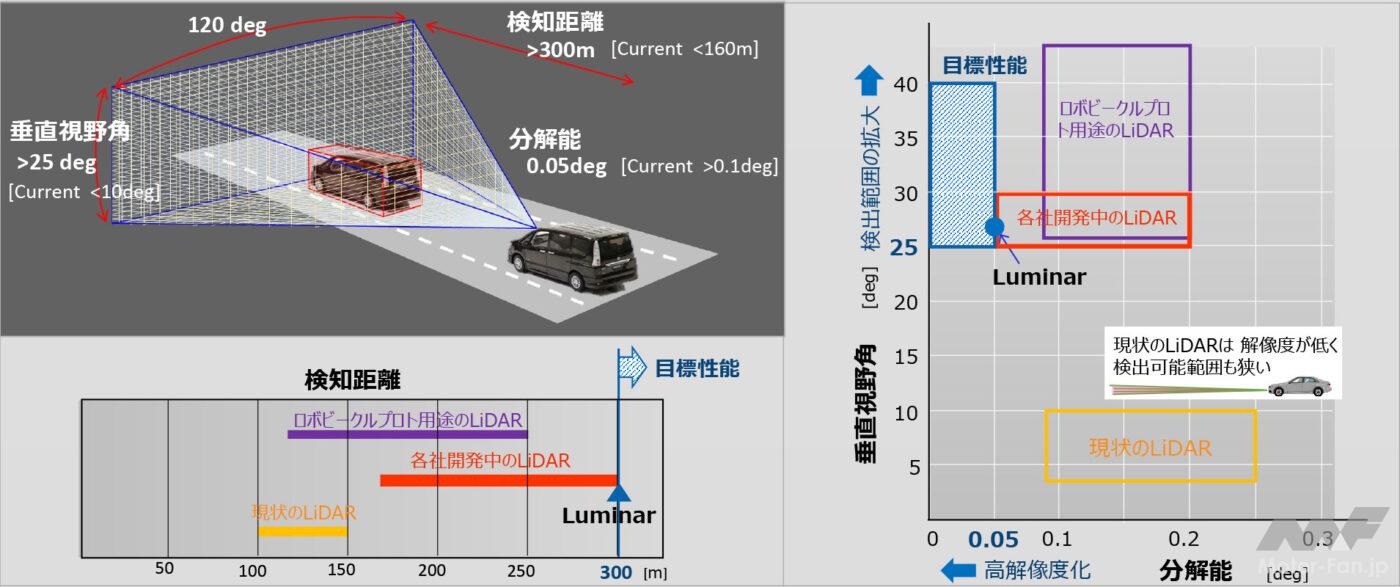
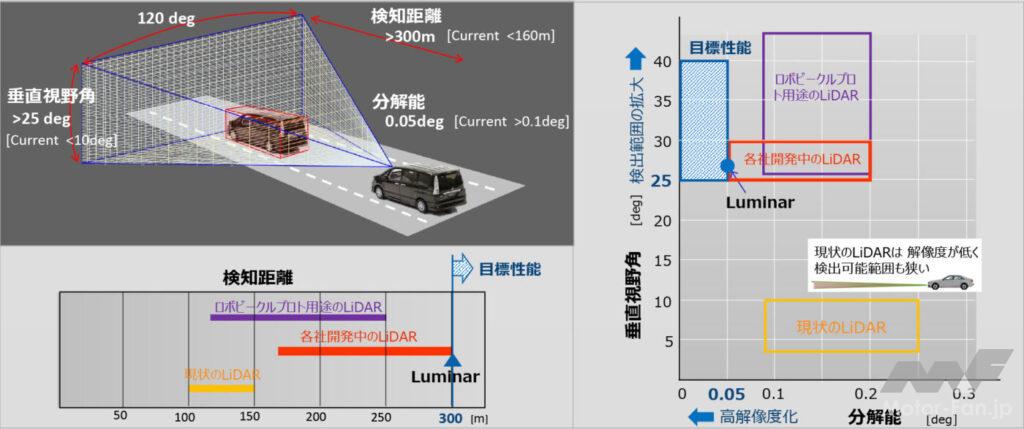
従来のライダーは垂直方向の視野角が狭く、「非常に薄く世の中を切り取っている」ため、切り取った物体が何なのかよくわからない状態だったという。また、解像度が低いため、遠くの物体を正確に把握する性能にも劣っていた。
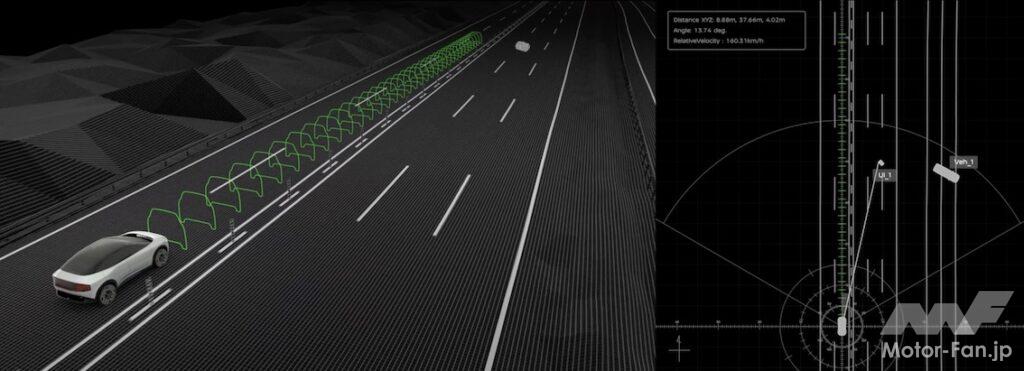
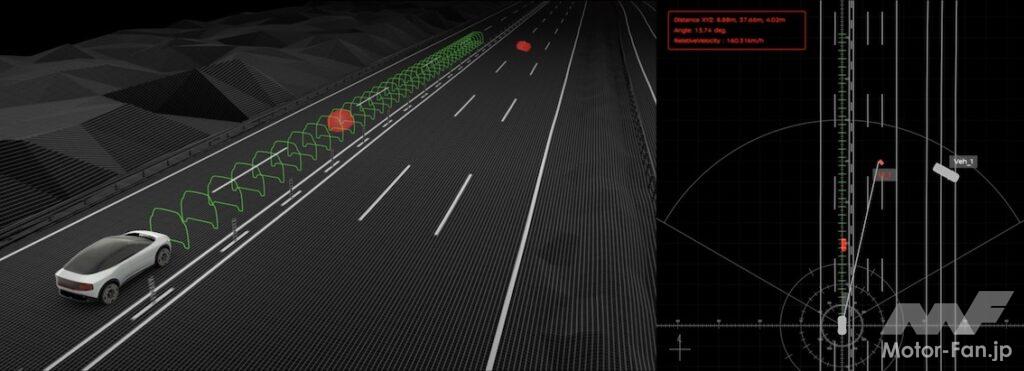
「いまは150mくらいしか見えていませんが、300m先も見たい。なぜなら、130km/h程度までの高速領域で障害物を安全に避けたいからです。300m手前から渋滞の末尾が見えていないと、何ごともなかったような自然な車線変更はできません。となると、現状の2倍の解像度が必要になります」
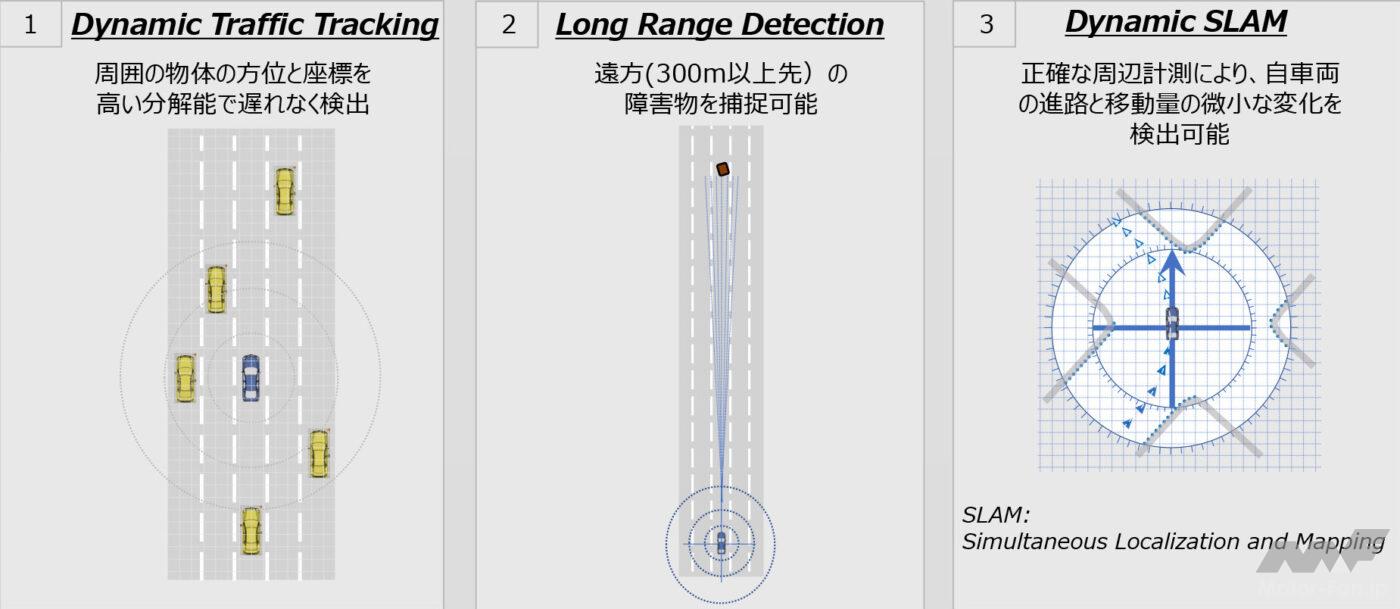
現在開発中のLiDARは、従来の2倍程度となる300mの検知距離を持ち、従来の2.5倍に相当する25度以上の垂直視野角を持つ。分解能(解像度)は従来比約2倍の0.05度だ。高性能な次世代のLiDARとカメラ、そしてレーダーを組み合わせた“センサーフュージョン”により、周囲の物体の形と位置を遅れなく検出できるようになる。これが、緊急回避を正確に行なう基礎になる。
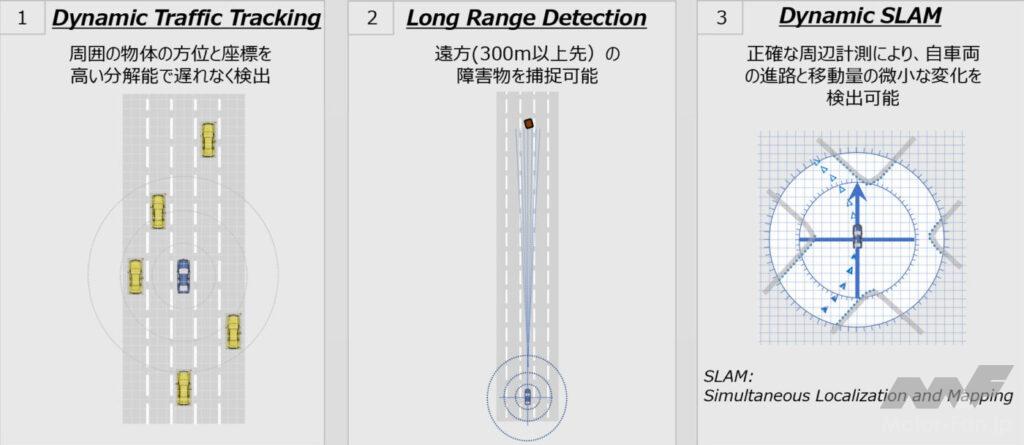
新技術では300m以上先の車両を検知できるため、高速道路で安全な衝突回避、あるいは自動運転が可能になる。また、周囲の空間を正確に再現できるようになるので、自律走行が可能になるのも特徴だ。例えば、これまでの技術では地図情報を頼りにホテルの敷地の前まで案内するのが限界だったが、新技術を使えば敷地内に入り込み、エントランスの前まで自動で案内することが可能になる。

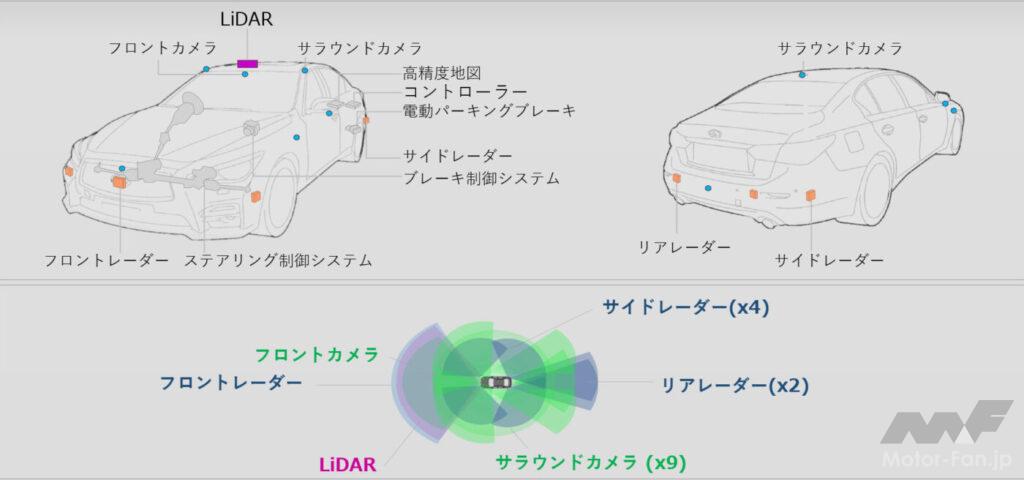


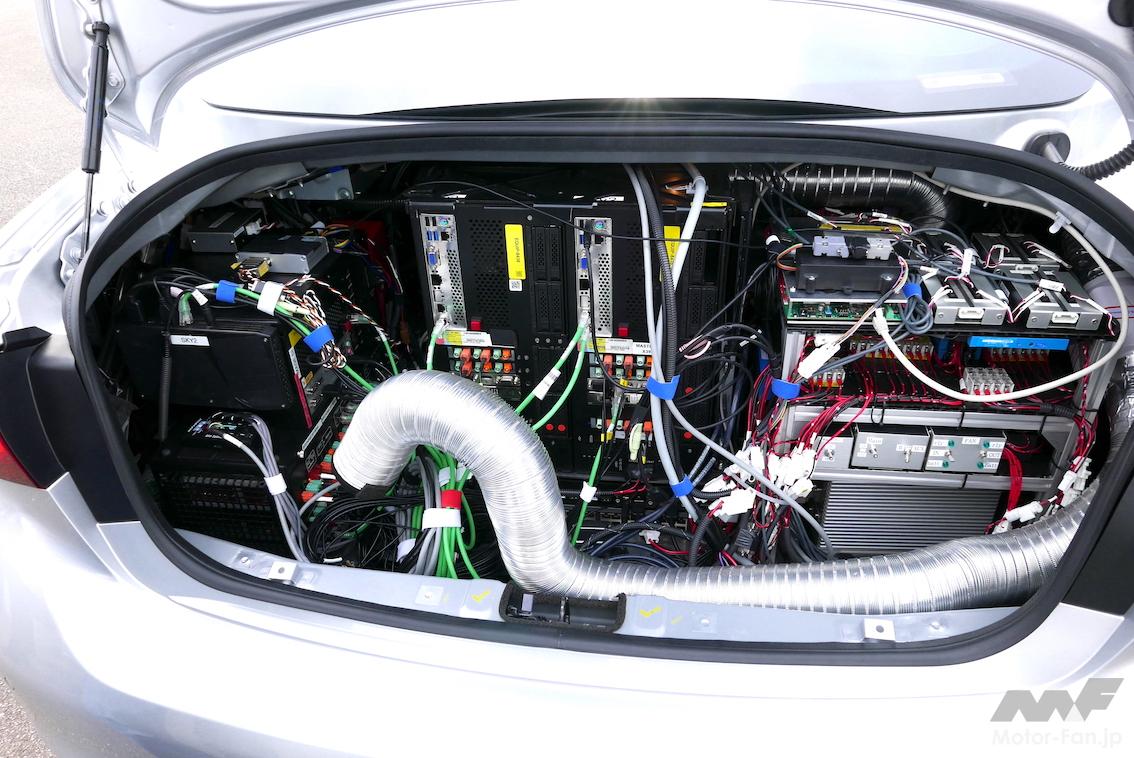
「ProPILOT – コンセプトゼロ」と名づけられた試作車(ステア・バイ・ワイヤシステムを搭載したスカイラインがベース)は次世代型のLiDARと7個のレーダー、10個のカメラを搭載している。LiDARをルーフに設置したのは、垂直方向の視野角を確保するためだ。筆者は“世代”なので、初見でピンと来たが、試作車はウルトラセブンのポインター号をイメージして仕立てられたという。LiDARを収める筐体に形状的な必然性はなく、遊び心である。機器がトランクいっぱいに搭載されているのは、実用化にあたって実際にこれだけの数とボリュームが必要なわけではなく、膨大な画像データを記録する装置も含んでいるからだ。システム全体の小型化が課題であることに変わりはないが。
実際に体験してみた



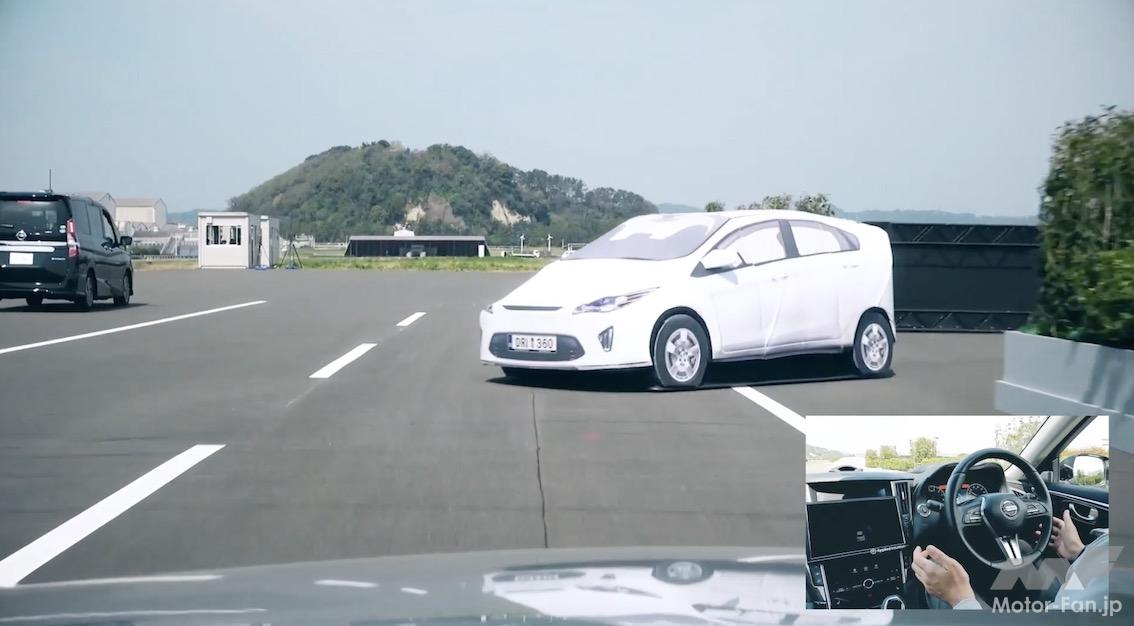
助手席で効果を体感したデモンストレーション走行のテーマは3つだった。時々刻々と変化する複雑な状況において、瞬時の判断で緊急回避を連続的に実施するのがひとつめ。ふたつめは、300m以上遠方から渋滞末尾を検知し、安全に回避するデモ。3つめは、正確な周辺計測により、地図が整備されていないホテルの敷地内を模擬したエリアの走行だ。
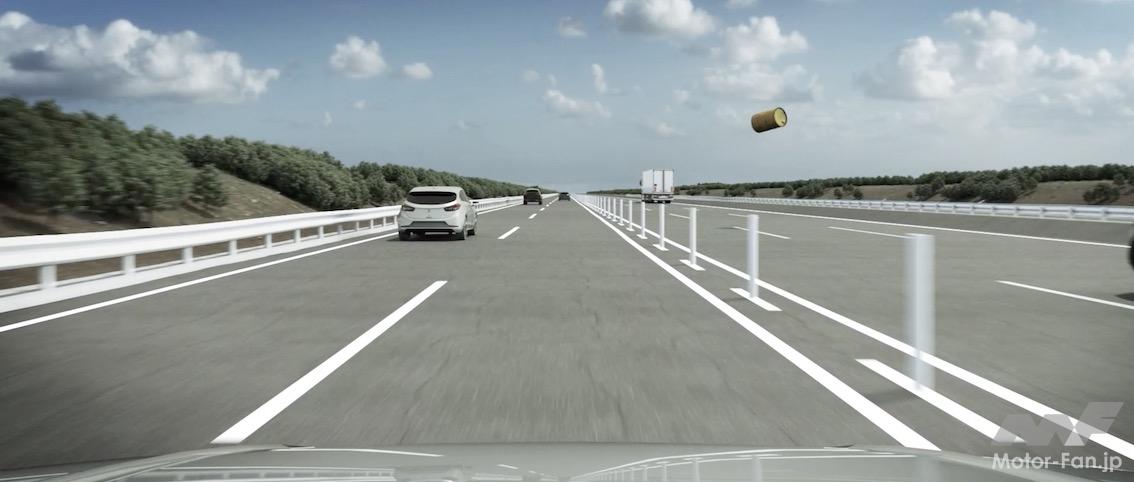
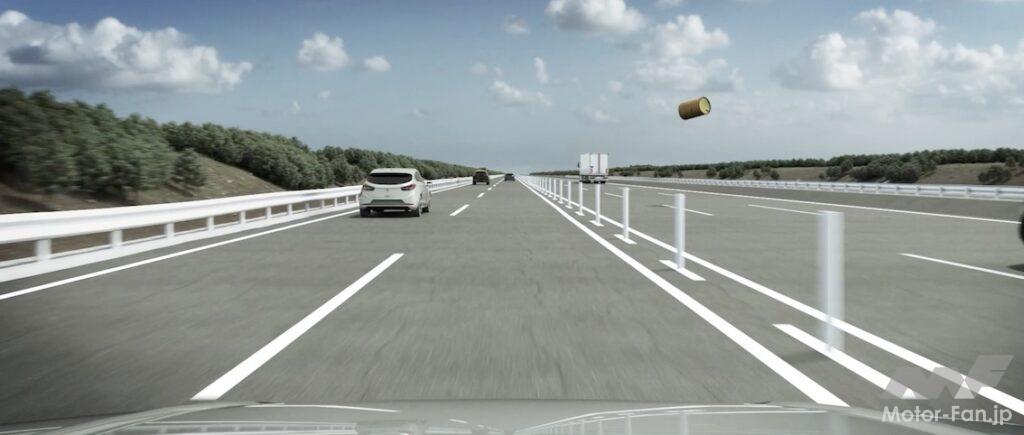
結論からいうと、どのデモも完璧だった。緊急回避は2種類あり、物陰からバックで飛び出してくるクルマを回避したと思ったら、その先で歩行者が飛び出してくるケースがひとつ。ふたつめは対向車から外れたタイヤが向かってくるシーンだ。タイヤは50km/h、試験車は60km/hで走っているので、相対速度は110km/hになる。前のクルマはタイヤを左に避けた。試験車は右に避けたが、それでホッとするヒマはなく、タイヤが脱落した対向車がスピンしながら中央分離帯を突き破って目の前に現れる。

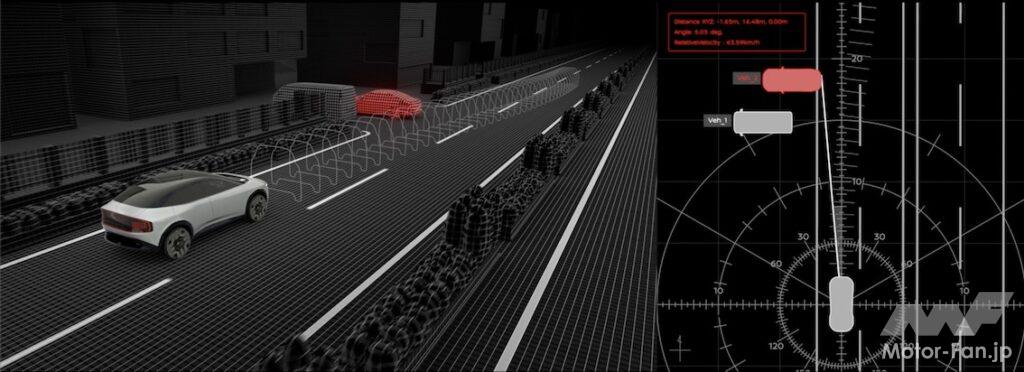

ひとつめのシーンでは飛び出してきたクルマに対して車線変更で回避し、歩行者に対しては緊急ブレーキで対処した。日産独自のアルゴリズムによる判断と操作の基本は、「できるだけ早く見つけて避けること」だという。緊急ブレーキでも衝突を回避することはできるが、その場合は追突のリスクが高まるからだ。早く見つけることができれば、それだけ時間的な余裕が生まれる。そのための、次世代型LiDARである。

日産はグラウンド・トゥルース・パーセプション技術の開発を2020年代半ばまでに完了させ、順次、新型車に搭載し、2030年までにはほぼすべての新型車に搭載することを目指していると発表した。緊急回避技術は人の命にかかわる。だから、エアバッグやABSなどの安全装備のように(オプションではなく)標準装備化を目指す考えだ。
プレスリリースの関連記事

約10年ぶり全面刷新、204psディーゼルと最新装備採用で大進化! トヨタ新型『ハイラックス』を旧型と徹底比較! 【新型ハイラックス 徹底比較】

トヨタ 新型ハリアーがさらに精悍に! モデリスタ&TRDが専用カスタムパーツを一斉発売、スポーティさを大幅パワーアップ!

ボルボ V60に最後を飾る特別仕様車登場! “最後のマイルドハイブリッド”特別仕様車&燃費11%向上でさらに進化の新PHEVを発売!

トヨタ『シエンタ』『ハリアー』『ヤリスクロス』、人気3モデルが同時にアップデート! 何が変わった? 改良ポイント総まとめ


アウディ史上最大サイズのSUV「Q9」をワールドプレミア「自動開閉式リヤドアを初採用」【動画】
